A题:资源可用性和性别比例
问题一:
涉及当灯鱼种群的性别比例发生变化时,对更大的生态系统产生的影响。为了分析这个问题,可以采用以下的数学建模思路:
建立灯鱼种群模型: 首先,建立一个灯鱼种群的动力学模型,考虑到性别比例的变化。这个模型需要考虑灯鱼的繁殖、生长、死亡等基本过程,并特别关注性别比例的变异。
确定性别比例变化规律: 利用已知的数据和观测结果,建立一个与食物供应、环境条件等相关的性别比例模型。这可能涉及到差分方程或微分方程,其中模型的参数需要从实际观测中获取。
定义生态系统指标: 为了评估对更大生态系统的影响,定义一些生态系统的指标,例如物种多样性、食物链稳定性、能量流动等。这些指标可以通过数学方程来表示,并与灯鱼种群的性别比例联系在一起。

涉及当灯鱼种群的性别比例发生变化时,对更大的生态系统产生的影响。为了分析这个问题,可以采用以下的数学建模思路:
建立灯鱼种群模型: 首先,建立一个灯鱼种群的动力学模型,考虑到性别比例的变化。这个模型需要考虑灯鱼的繁殖、生长、死亡等基本过程,并特别关注性别比例的变异。
确定性别比例变化规律: 利用已知的数据和观测结果,建立一个与食物供应、环境条件等相关的性别比例模型。这可能涉及到差分方程或微分方程,其中模型的参数需要从实际观测中获取。
定义生态系统指标: 为了评估对更大生态系统的影响,定义一些生态系统的指标,例如物种多样性、食物链稳定性、能量流动等。这些指标可以通过数学方程来表示,并与灯鱼种群的性别比例联系在一起。
# 模型参数
r_F = 0.1 # 雌性出生率
r_M = 0.1 # 雄性出生率
alpha = 0.2 # 雌性竞争和捕食影响系数
beta = 0.1 # 雄性竞争和捕食影响系数
gamma = 0.2 # 雄性竞争和捕食影响系数
delta = 0.1 # 雄性竞争和捕食影响系数
lambda_ = 0.05 # 食物的自然减少速率
mu = 0.02 # 外部的食物补给速率
eta1 = 0.1 # 雌性数量对性别比例的影响系数
eta2 = 0.1 # 雄性数量对性别比例的影响系数
eta3 = 0.1 # 食物供应对性别比例的影响系数
# 初值
F0 = 100 # 初始雌性数量
M0 = 100 # 初始雄性数量
S0 = 50 # 初始食物供应
# 模型函数
def model(y, t):
F, M, S = y
dFdt = r_F * F * (1 - alpha * F - beta * M)
dMdt = r_M * M * (1 - gamma * F - delta * M)
dSdt = -lambda_ * S + mu
dSexRatiodt = eta1 * dFdt + eta2 * dMdt + eta3 * dSdt
return [dFdt, dMdt, dSdt, dSexRatiodt]
# 求解ODE
t = np.linspace(0, 100, 1000)
y0 = [F0, M0, S0, M0 / (F0 + M0)] # 初始条件包括性别比例
solution = odeint(model, y0, t)
# 提取结果
F = solution[:, 0]
M = solution[:, 1]
S = solution[:, 2]
SexRatio = solution[:, 3]
# 绘图
plt.figure(figsize=(10, 6))
plt.subplot(2, 1, 1)
plt.plot(t, F, 'b', label='雌性')
plt.plot(t, M, 'r', label='雄性')
plt.xlabel('时间')
plt.ylabel('数量')
plt.legend()
plt.title('灯鱼种群数量随时间变化')
plt.subplot(2, 1, 2)
plt.plot(t, SexRatio, 'g')
plt.xlabel('时间')
plt.ylabel('性别比例')
plt.title('性别比例随时间变化')
plt.tight_layout()
plt.show()
问题二:
涉及对灯笼鱼种群的利弊进行分析。为了深入研究这个问题,以下是一个数学建模的思路:
定义利弊指标: 首先,定义用于衡量灯笼鱼种群状况的利弊指标。这些指标可以包括种群的稳定性、生态系统的多样性、资源利用效率等。每个指标都可以用数学方程式来表示
生态系统动力学模型: 基于灯笼鱼与其他生物的相互作用,建立生态系统的动力学模型。这可能包括灯笼鱼与其食物、天敌以及其他相互作用物种之间的关系。这个模型将描述生态系统中各个组分的演化和相互作用。
利弊指标与生态系统模型关联: 将定义的利弊指标与生态系统模型中的各个变量联系起来。例如,种群的稳定性可以与灯笼鱼数量的方差或生态系统的总体稳定性有关。
模拟不同情景: 利用模型模拟不同的情景,例如改变灯笼鱼的繁殖率、食物供应的变化等。观察这些情景下生态系统中各个指标的变化,以便评估不同因素对种群的利弊影响

# 模型参数
r_L = 0.1 # 灯笼鱼出生率
r_F = 0.2 # 食物出生率
r_P = 0.15 # 天敌出生率
alpha_L = 0.1 # 灯笼鱼与食物的相互作用系数
beta_L = 0.05 # 灯笼鱼与天敌的相互作用系数
gamma_L = 0.1 # 灯笼鱼对食物的捕食效率
delta_L = 0.05 # 灯笼鱼对天敌的捕食效率
# 初始值
L0 = 50 # 初始灯笼鱼数量
F0 = 100 # 初始食物数量
P0 = 20 # 初始天敌数量
# 定义ODE系统
def odeSystem(y, t):
L, F, P = y
dLdt = r_L * L * (1 - alpha_L * L / F - beta_L * L / P)
dFdt = r_F * F - gamma_L * L * F
dPdt = r_P * P + delta_L * L * P
return [dLdt, dFdt, dPdt]
# 求解ODE
t = np.linspace(0, 100, 1000)
y0 = [L0, F0, P0]
solution = odeint(odeSystem, y0, t)
# 提取结果
L = solution[:, 0]
# 计算种群稳定性指标(示例:方差)
variance = np.var(L
问题三:

import numpy as np
import matplotlib.pyplot as plt
from scipy.integrate import odeint
# 模型参数
r_F = 0.1 # 雌性出生率
r_M = 0.1 # 雄性出生率
alpha_F = 0.2 # 雌性竞争和捕食影响系数
alpha_M = 0.2 # 雄性竞争和捕食影响系数
beta_P = 0.1 # 物种的出生率
gamma_P = 0.1 # 物种对雌性的捕食效率
delta_P = 0.1 # 物种对雄性的捕食效率
# 模型求解时间范围
t = np.linspace(0, 100, 1000)
# 初始值
F0 = 50 # 初始雌性数量
M0 = 50 # 初始雄性数量
P0 = 100 # 初始物种数量
# 定义ODE系统
def odeSystem(y, t):
F, M, P = y
dFdt = r_F * F * (1 - alpha_F * M/F)
dMdt = r_M * M * (1 - alpha_M * F/M)
dPdt = beta_P * P * (1 - gamma_P * F/P - delta_P * M/P)
return [dFdt, dMdt, dPdt]
问题四:

# 模型参数
r_F = 0.1 # 雌性出生率
r_M = 0.1 # 雄性出生率
alpha_F = 0.2 # 雌性竞争和捕食影响系数
alpha_M = 0.2 # 雄性竞争和捕食影响系数
alpha_S = 0.1 # 寄生虫出生率
beta_S0 = 0.05 # 基础寄生虫捕食率
K = 500 # 环境容纳量
gamma = 0.1 # 性别比例对寄生虫捕食率的调节系数
# 模型求解时间范围
t = np.linspace(0, 100, 1000)
# 初始值
F0 = 50 # 初始雌性数量
M0 = 50 # 初始雄性数量
S0 = 10 # 初始寄生虫数量
# 定义ODE系统
def odeSystem(y, t):
F, M, S = y
dFdt = r_F * F * (1 - alpha_F * M/F)
dMdt = r_M * M * (1 - alpha_M * F/M)
dSdt = alpha_S * S * (1 - (beta_S0 + gamma * (M/(F + M))) * (F + M)/K)
return [dFdt, dMdt, dSdt]
# 求解ODE
solution = odeint(odeSystem, [F0, M0, S0], t)
# 提取结果
F = solution[:, 0]
M = solution[:, 1]
S = solution[:, 2]
# 计算性别比例
SexRatio = M / (F + M)
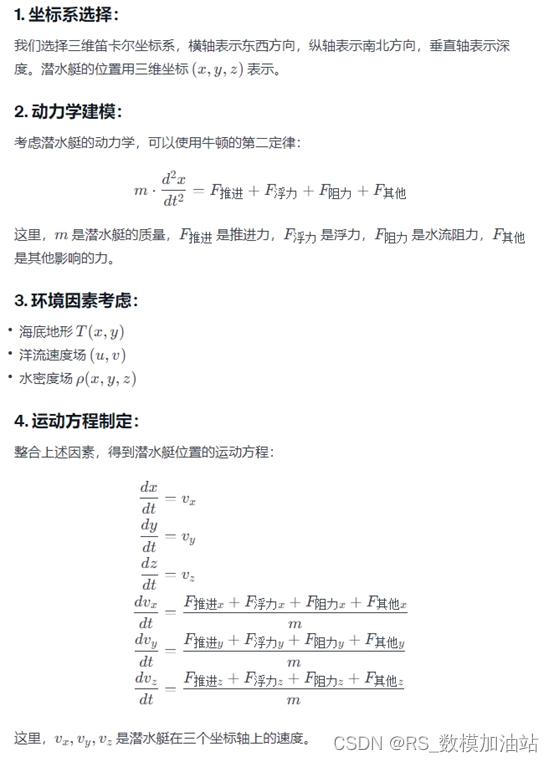
B题:寻找潜水器
问题一:

import numpy as np
import matplotlib.pyplot as plt
def submarine_simulation():
# 潜水艇运动模拟
# 初始参数设置
m = 1000 # 潜水艇质量 (kg)
# 初始条件
x0, y0, z0 = 0, 0, 0 # 初始位置
vx0, vy0, vz0 = 1, 1, 0.5 # 初始速度
# 时间参数
dt = 0.1 # 时间步长
t = np.arange(0, 10, dt) # 时间范围
# 预分配数组
num_steps = len(t)
x = np.zeros(num_steps)
y = np.zeros(num_steps)
z = np.zeros(num_steps)
vx = np.zeros(num_steps)
vy = np.zeros(num_steps)
vz = np.zeros(num_steps)
# 数值模拟
x[0], y[0], z[0] = x0, y0, z0
vx[0], vy[0], vz[0] = vx0, vy0, vz0
for i in range(1, num_steps):
# 计算潜水艇在各个方向上的受力(这里简化为常数)
Fx, Fy, Fz = 10, 5, 2
# 计算加速度
ax = Fx / m
ay = Fy / m
az = Fz / m
问题二:
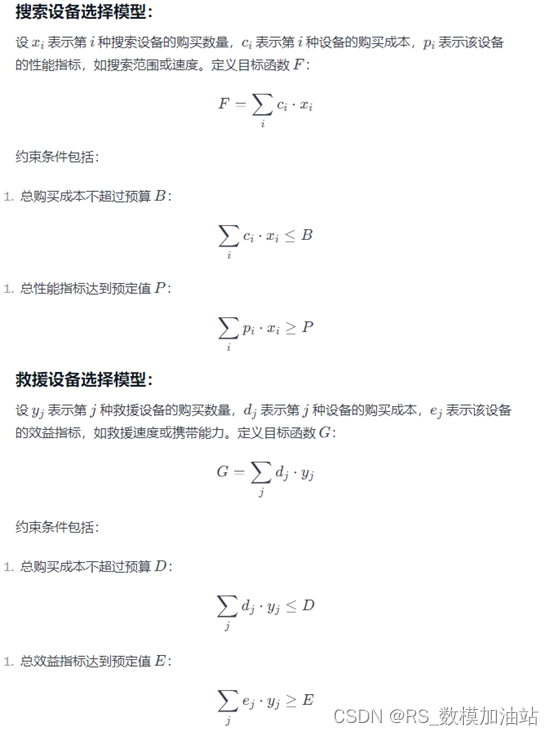
额外搜索设备的选择:
1、声纳系统:
数学模型: 建立声纳系统的数学模型,考虑其探测范围、灵敏度等因素。
成本考虑: 考虑购买、安装和维护声纳系统的成本。
2、水下摄像头和激光扫描仪:
数学模型: 考虑水下摄像头和激光扫描仪的视野范围和分辨率。
成本考虑: 估算购买、维护和运营这些设备的成本。
3、水下机器人:
数学模型: 考虑水下机器人的移动性、操控性和传感能力。
成本考虑: 估算购买和维护水下机器人的成本。
4、磁力探测器:
数学模型: 考虑磁力探测器在水下环境中检测金属物体的能力。
成本考虑: 估算购买和维护磁力探测器的成本。
5、自主水下车辆(AUV):
数学模型: 建立AUV的运动模型和传感器模型。
成本考虑: 估算购买、维护和运营AUV的成本。
问题三:
潜水艇轨迹预测模型:
利用定位模型得到的潜水艇位置信息,建立潜水艇轨迹预测模型。这可能需要考虑水流、潮汐等环境因素。
搜索设备部署模型:
建立搜索设备的部署模型,确定每个搜索设备的初始部署点和搜索模式。考虑搜救船舶的速度,设备的搜索效率以及搜索范围。
搜救时间模型:
建立搜救时间模型,考虑不同设备的效率、搜救船舶的速度以及潜水艇可能的位置。该模型应该能够计算在给定的时间内找到潜水艇的概率。
搜救概率模型:
根据不同设备的搜索效率和搜救船舶的速度,建立搜救概率模型。该模型应该能够随着时间的推移更新搜救概率。
优化和决策:
多目标优化:
利用多目标优化算法,将搜救时间和搜救概率作为目标函数,优化搜索设备的部署方案。
实时调整策略:
在实时监测到搜救进展的情况下,动态调整搜索设备的部署,以最大化找到潜水艇的概率。
不确定性处理:
考虑搜救过程中的不确定性,例如环境变化、搜索设备故障等,建立鲁棒的优化模型。
# 潜水艇轨迹预测模型
def submarine_trajectory(t, state):
# 简化的动力学模型,需要根据实际情况修改
x, y, z, vx, vy, vz = state
dxdt = vx
dydt = vy
dzdt = vz
dvxdt = f_x(x, y, z, t)
dvydt = f_y(x, y, z, t)
dvzdt = f_z(x, y, z, t)
return [dxdt, dydt, dzdt, dvxdt, dvydt, dvzdt]
# 搜救设备部署模型
def search_device_motion(t, position, v_s, epsilon_i, theta_i):
# 简化的搜索设备运动模型,需要根据实际情况修改
dxdt = v_s * epsilon_i * np.cos(theta_i)
dydt = v_s * epsilon_i * np.sin(theta_i)
dzdt = 0
return [dxdt, dydt, dzdt]
# 搜救时间模型
def rescue_time_model(T, search_device_positions, submarine_trajectory):
# 计算在给定时间内找到潜水艇的概率
P_T = 1
for position in search_device_positions:
P_i_T = search_device_detection_probability(T, position, submarine_trajectory)
P_T *= P_i_T
return 1 - P_T
# 搜救概率模型
def update_rescue_probability(previous_probability, search_device_detection_probability):
# 贝叶斯更新搜救概率
updated_probability = previous_probability * search_device_detection_probability
updated_probability /= np.sum(updated_probability)
return updated_probability
问题四:

import numpy as np
from scipy.integrate import odeint
# 多目标轨迹预测模型
def multi_submarine_trajectory(states, t):
# 具体的动力学模型,根据目标个数修改
num_targets = len(states) // 6
dx = np.zeros_like(states)
for i in range(num_targets):
idx = slice(i*6, (i+1)*6)
dx[idx] = submarine_trajectory(states[idx], t)
return dx
# 多目标搜索设备部署模型
def multi_search_device_motion(positions, t, v_s, epsilon, u):
# 具体的搜索设备运动模型,根据目标个数修改
num_targets = len(positions) // 3
dp = np.zeros_like(positions)
for i in range(num_targets):
idx = slice(i*3, (i+1)*3)
dp[idx] = search_device_motion(positions[idx], t, v_s, epsilon, u[:, i])
return dp
# 多目标搜救时间模型
def multi_rescue_time_model(T, search_device_positions, multi_submarine_trajectory):
# 计算在给定时间内找到潜水艇的概率,根据目标个数修改
num_targets = len(search_device_positions) // 3
P_T = 1
for i in range(num_targets):
idx = slice(i*3, (i+1)*3)
P_i_T = search_device_detection_probability(T, search_device_positions[idx], multi_submarine_trajectory[idx])
P_T *= P_i_T
P_T = 1 - P_T
return P_T
# 多目标搜救概率模型
def multi_update_rescue_probability(previous_probability, search_device_detection_probability):
# 贝叶斯更新搜救概率,根据目标个数修改
num_targets = len(previous_probability)
updated_probability = previous_probability * search_device_detection_probability
updated_probability /= np.sum(updated_probability)
return updated_probability
# 示例的搜索设备检测概率模型
def search_device_detection_probability(T, position, submarine_trajectory):
# 简化的检测概率模型,需要根据实际情况修改
# 假设设备在时间 T 内能够探测到潜水艇
return 0.8
后续就简单展示一下啦!
C题: 网球运动中的动力
D题: 五大湖水问题

E题:财产保险的可持续性