0.函数更新内容
仅对地图点进行融合。
1.函数作用
检查并融合当前关键帧与相邻帧(两级相邻)重复的地图点。
2.函数步骤
Step 1:获得当前关键帧在共视图中权重排名前nn的邻接关键帧
Step 2:存储一级相邻关键帧及其二级相邻关键帧
将当前帧的地图点分别投影到两级相邻关键帧,寻找匹配点对应的地图点进行融合,称为正向投影融合
Step 4:将两级相邻关键帧地图点分别投影到当前关键帧,寻找匹配点对应的地图点进行融合,称为反向投影融合
Step 5:更新当前帧地图点的描述子、深度、平均观测方向等属性
Step 6:更新当前帧与其它帧的共视连接关系
3.code
/** * @brief 检查并融合当前关键帧与相邻帧(两级相邻)重复的地图点 * */ void LocalMapping::SearchInNeighbors() { // Retrieve neighbor keyframes // Step 1:获得当前关键帧在共视图中权重排名前nn的邻接关键帧 // 开始之前先定义几个概念 // 当前关键帧的邻接关键帧,称为一级相邻关键帧,也就是邻居 // 与一级相邻关键帧相邻的关键帧,称为二级相邻关键帧,也就是邻居的邻居 // 单目情况要20个邻接关键帧,双目或者RGBD则要10个 int nn = 10; if(mbMonocular) nn=20; // 和当前关键帧相邻的关键帧,也就是一级相邻关键帧 const vector<KeyFrame*> vpNeighKFs = mpCurrentKeyFrame->GetBestCovisibilityKeyFrames(nn); // Step 2:存储一级相邻关键帧及其二级相邻关键帧 vector<KeyFrame*> vpTargetKFs; // 开始对所有候选的一级关键帧展开遍历: for(vector<KeyFrame*>::const_iterator vit=vpNeighKFs.begin(), vend=vpNeighKFs.end(); vit!=vend; vit++) { KeyFrame* pKFi = *vit; // 没有和当前帧进行过融合的操作 if(pKFi->isBad() || pKFi->mnFuseTargetForKF == mpCurrentKeyFrame->mnId) continue; // 加入一级相邻关键帧 vpTargetKFs.push_back(pKFi); // 标记已经加入 pKFi->mnFuseTargetForKF = mpCurrentKeyFrame->mnId; // Extend to some second neighbors // 以一级相邻关键帧的共视关系最好的5个相邻关键帧 作为二级相邻关键帧 const vector<KeyFrame*> vpSecondNeighKFs = pKFi->GetBestCovisibilityKeyFrames(5); // 遍历得到的二级相邻关键帧 for(vector<KeyFrame*>::const_iterator vit2=vpSecondNeighKFs.begin(), vend2=vpSecondNeighKFs.end(); vit2!=vend2; vit2++) { KeyFrame* pKFi2 = *vit2; // 当然这个二级相邻关键帧要求没有和当前关键帧发生融合,并且这个二级相邻关键帧也不是当前关键帧 if(pKFi2->isBad() || pKFi2->mnFuseTargetForKF==mpCurrentKeyFrame->mnId || pKFi2->mnId==mpCurrentKeyFrame->mnId) continue; // 存入二级相邻关键帧 vpTargetKFs.push_back(pKFi2); } } // Search matches by projection from current KF in target KFs // 使用默认参数, 最优和次优比例0.6,匹配时检查特征点的旋转 ORBmatcher matcher; // Step 3:将当前帧的地图点分别投影到两级相邻关键帧,寻找匹配点对应的地图点进行融合,称为正向投影融合 vector<MapPoint*> vpMapPointMatches = mpCurrentKeyFrame->GetMapPointMatches(); for(vector<KeyFrame*>::iterator vit=vpTargetKFs.begin(), vend=vpTargetKFs.end(); vit!=vend; vit++) { KeyFrame* pKFi = *vit; // 将地图点投影到关键帧中进行匹配和融合;融合策略如下 // 1.如果地图点能匹配关键帧的特征点,并且该点有对应的地图点,那么选择观测数目多的替换两个地图点 // 2.如果地图点能匹配关键帧的特征点,并且该点没有对应的地图点,那么为该点添加该投影地图点 // 注意这个时候对地图点融合的操作是立即生效的 matcher.Fuse(pKFi,vpMapPointMatches); } // Search matches by projection from target KFs in current KF // Step 4:将两级相邻关键帧地图点分别投影到当前关键帧,寻找匹配点对应的地图点进行融合,称为反向投影融合 // 用于进行存储要融合的一级邻接和二级邻接关键帧所有MapPoints的集合 vector<MapPoint*> vpFuseCandidates; vpFuseCandidates.reserve(vpTargetKFs.size()*vpMapPointMatches.size()); // Step 4.1:遍历每一个一级邻接和二级邻接关键帧,收集他们的地图点存储到 vpFuseCandidates for(vector<KeyFrame*>::iterator vitKF=vpTargetKFs.begin(), vendKF=vpTargetKFs.end(); vitKF!=vendKF; vitKF++) { KeyFrame* pKFi = *vitKF; vector<MapPoint*> vpMapPointsKFi = pKFi->GetMapPointMatches(); // 遍历当前一级邻接和二级邻接关键帧中所有的MapPoints,找出需要进行融合的并且加入到集合中 for(vector<MapPoint*>::iterator vitMP=vpMapPointsKFi.begin(), vendMP=vpMapPointsKFi.end(); vitMP!=vendMP; vitMP++) { MapPoint* pMP = *vitMP; if(!pMP) continue; // 如果地图点是坏点,或者已经加进集合vpFuseCandidates,跳过 if(pMP->isBad() || pMP->mnFuseCandidateForKF == mpCurrentKeyFrame->mnId) continue; // 加入集合,并标记已经加入 pMP->mnFuseCandidateForKF = mpCurrentKeyFrame->mnId; vpFuseCandidates.push_back(pMP); } } // Step 4.2:进行地图点投影融合,和正向融合操作是完全相同的 // 不同的是正向操作是"每个关键帧和当前关键帧的地图点进行融合",而这里的是"当前关键帧和所有邻接关键帧的地图点进行融合" matcher.Fuse(mpCurrentKeyFrame,vpFuseCandidates); // Update points // Step 5:更新当前帧地图点的描述子、深度、平均观测方向等属性 vpMapPointMatches = mpCurrentKeyFrame->GetMapPointMatches(); for(size_t i=0, iend=vpMapPointMatches.size(); i<iend; i++) { MapPoint* pMP=vpMapPointMatches[i]; if(pMP) { if(!pMP->isBad()) { // 在所有找到pMP的关键帧中,获得最佳的描述子 pMP->ComputeDistinctiveDescriptors(); // 更新平均观测方向和观测距离 pMP->UpdateNormalAndDepth(); } } } // Update connections in covisibility graph // Step 6:更新当前帧与其它帧的共视连接关系 mpCurrentKeyFrame->UpdateConnections(); }
4.函数解析
由于我们是在一级及二级共视关键帧上进行地图点融合,我们用nn变量记录要找寻的局部建图线程处理的当前帧mpCurrentKeyFrame的一级共视关键帧的数目nn,对于单目情况要20个邻接关键帧,双目或者RGBD则要10个。
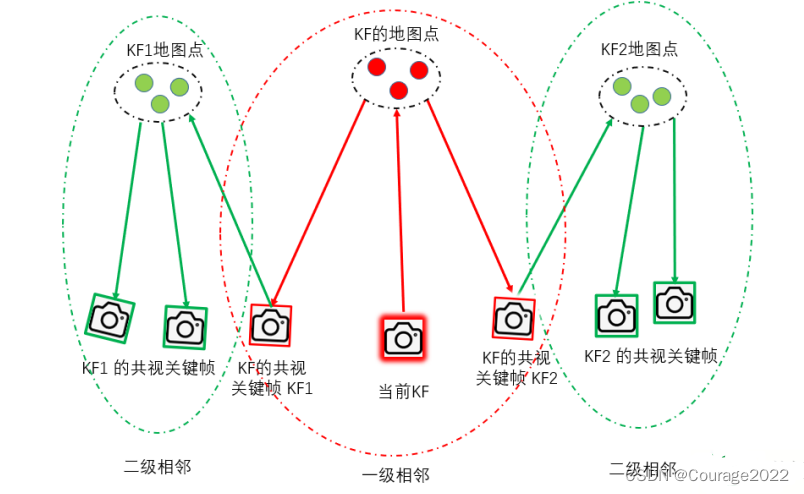
我们将和当前关键帧mpCurrentKeyFrame(如上图KF)的一级共视关键帧的共视程度前nn的一级共视关键帧存储到vpNeighKFs临时变量中。
关键帧的mnFuseTargetForKF属性代表它即将和哪个关键帧进行融合。
开始对所有候选的一级关键帧vpNeighKFs展开遍历,若没有跟当前帧进行融合操作(避免重复添加),则将该一级共视关键帧加入vpTargetKFs向量并将mnFuseTargetForKF属性设置为mpCurrentKeyFrame的ID。
以一级相邻关键帧的共视关系最好的5个相邻关键帧 作为二级相邻关键帧(上图中绿色的关键帧),判断二级共视关键帧是否已经加入过要融合的关键帧中,将二级共视关键帧加入变量vpTargetKFs中。
现在!变量vpTargetKFs中存储的关键帧是我们当前关键帧mpCurrentKeyFrame的一级和二级共视关键帧(上图红色及绿色帧),即将用于进行融合地图点。
获取当前帧mpCurrentKeyFrame的所有地图点存放在vpMapPointMatches变量中,将当前帧的地图点分别投影到两级相邻关键帧,寻找匹配点对应的地图点进行融合,进行正向投影融合:
ORB-SLAM2 --- ORBmatcher::Fuse函数 --- 局部建图线程调用重载版解析
https://blog.csdn.net/qq_41694024/article/details/128561164 遍历每一个一级邻接和二级邻接关键帧,收集他们的地图点存储到 vpFuseCandidates,进行反向投影融合。
对比:
正向投影融合是融合当前帧mpCurrentKeyFrame的地图点vpMapPointMatches和其一级、二级共视关键帧。
反向投影融合是融合当前帧mpCurrentKeyFrame和其一级、二级共视关键帧的地图点vpFuseCandidates。
最后还是老样子:更新当前帧地图点的描述子、深度、平均观测方向等属性。
对每一个地图点更新它的最佳描述子:
ORB-SLAM2 --- MapPoint::ComputeDistinctiveDescriptors 函数
更新当前帧与其它帧的共视连接关系。
ORB-SLAM2 --- KeyFrame::AddConnection函数解析