目录
介绍
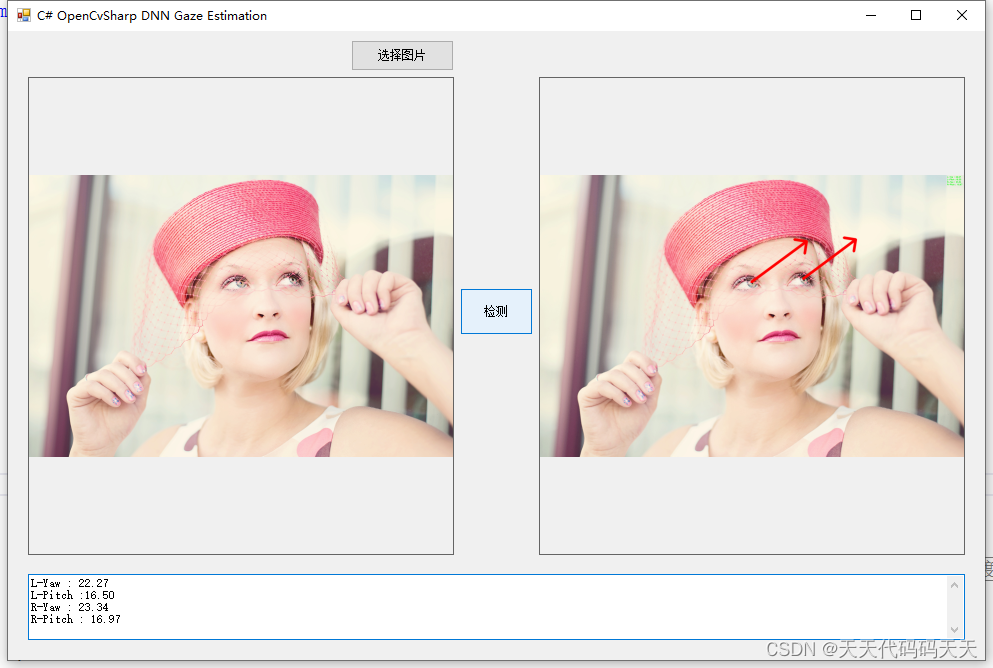
效果
模型信息
项目
代码
frmMain.cs
GazeEstimation.cs
下载
C# OpenCvSharp DNN Gaze Estimation
介绍
训练源码地址:https://github.com/deepinsight/insightface/tree/master/reconstruction/gaze
效果
模型信息
Inputs
-------------------------
name:input
tensor:Float[1, 3, 160, 160]
---------------------------------------------------------------
Outputs
-------------------------
name:output
tensor:Float[1, 962, 3]
---------------------------------------------------------------
项目
代码
frmMain.cs
using OpenCvSharp;
using OpenCvSharp.Dnn;
using System;
using System.Collections.Generic;
using System.Drawing;
using System.Windows.Forms;
namespace OpenCvSharp_Yolov8_Demo
{
public partial class frmMain : Form
{
public frmMain()
{
InitializeComponent();
}
string fileFilter = "*.*|*.bmp;*.jpg;*.jpeg;*.tiff;*.tiff;*.png";
string image_path = "";
string startupPath;
Mat image;
Mat result_image;
YOLOv8_face face_detector = new YOLOv8_face("model/yolov8n-face.onnx", 0.45f, 0.5f);
GazeEstimation gaze_predictor=new GazeEstimation("model/generalizing_gaze_estimation_with_weak_supervision_from_synthetic_views_1x3x160x160.onnx");
private void Form1_Load(object sender, EventArgs e)
{
image_path = "img_test/1.jpg";
pictureBox1.Image = new Bitmap(image_path);
image = new Mat(image_path);
}
private void button1_Click(object sender, EventArgs e)
{
OpenFileDialog ofd = new OpenFileDialog();
ofd.Filter = fileFilter;
if (ofd.ShowDialog() != DialogResult.OK) return;
pictureBox1.Image = null;
image_path = ofd.FileName;
pictureBox1.Image = new Bitmap(image_path);
textBox1.Text = "";
pictureBox2.Image = null;
}
private void button2_Click(object sender, EventArgs e)
{
if (image_path == "")
{
return;
}
textBox1.Text = "";
pictureBox2.Image = null;
button2.Enabled = false;
Application.DoEvents();
image = new Mat(image_path);
List<Face> ltFace = face_detector.Detect(new Mat(image_path));
if (ltFace.Count > 0)
{
result_image = image.Clone();
//face_detector.DrawPred(ltFace, result_image);
String info = "";
foreach (Face item in ltFace)
{
gaze_predictor.Detect(image, item);
result_image = gaze_predictor.DrawOn(result_image, item,out info);
}
pictureBox2.Image = new Bitmap(result_image.ToMemoryStream());
textBox1.Text = info;
}
else
{
textBox1.Text = "无信息";
}
button2.Enabled = true;
}
}
}
GazeEstimation.cs
unsafe public class GazeEstimation
{
float[] mean = new float[] { 0.5f, 0.5f, 0.5f };
float[] std = new float[] { 0.5f, 0.5f, 0.5f };
int[] iris_idx_481 = new int[] { 248, 252, 224, 228, 232, 236, 240, 244 };
int num_eye = 481;
int input_size = 160;
float[] eye_kps;
Net net;
public GazeEstimation(string modelpath)
{
net = CvDnn.ReadNetFromOnnx(modelpath);
eye_kps = new float[num_eye * 2 * 3];
}
public void Detect(Mat img, Face box)
{
Point kps_right_eye = box.kpt[1];
Point kps_left_eye = box.kpt[0];
float[] center = new float[] { (kps_right_eye.X + kps_left_eye.X) * 0.5f, (kps_right_eye.Y + kps_left_eye.Y) * 0.5f };
float _size = (float)(Math.Max(box.rect.Width / 1.5f, Math.Abs(kps_right_eye.X - kps_left_eye.X)) * 1.5f);
float _scale = input_size / _size;
//transform
float cx = center[0] * _scale;
float cy = center[1] * _scale;
float[] data = new float[] { _scale, 0, (float)(-cx + input_size * 0.5), 0, _scale, (float)(-cy + input_size * 0.5) };
Mat M = new Mat(2, 3, MatType.CV_32F, data);
Mat cropped = new Mat();
Cv2.WarpAffine(img, cropped, M, new Size(input_size, input_size));
Mat rgbimg = new Mat();
Cv2.CvtColor(cropped, rgbimg, ColorConversionCodes.BGR2RGB);
Mat normalized_mat = Normalize(rgbimg);
Mat blob = CvDnn.BlobFromImage(normalized_mat);
net.SetInput(blob);
Mat[] outs = new Mat[3] { new Mat(), new Mat(), new Mat() };
string[] outBlobNames = net.GetUnconnectedOutLayersNames().ToArray();
net.Forward(outs, outBlobNames);
float* opred = (float*)outs[0].Data;//outs[0]的形状是(1,962,3)
Mat IM = new Mat();
Cv2.InvertAffineTransform(M, IM);
//trans_points
float scale = (float)Math.Sqrt(IM.At<float>(0, 0) * IM.At<float>(0, 0) + IM.At<float>(0, 1) * IM.At<float>(0, 1));
int row = outs[0].Size(1);
int col = outs[0].Size(2);
for (int i = 0; i < row; i++)
{
eye_kps[i * 3] = IM.At<float>(0, 0) * opred[i * 3] + IM.At<float>(0, 1) * opred[i * 3 + 1] + IM.At<float>(0, 2);
eye_kps[i * 3 + 1] = IM.At<float>(1, 0) * opred[i * 3] + IM.At<float>(1, 1) * opred[i * 3 + 1] + IM.At<float>(1, 2);
eye_kps[i * 3 + 2] = opred[i * 3 + 2] * scale;
}
}
public Mat DrawOn(Mat srcimg, Face box, out string info)
{
StringBuilder sb = new StringBuilder();
float rescale = 300.0f / box.rect.Width;
Mat eimg = new Mat();
Cv2.Resize(srcimg, eimg, new Size(), rescale, rescale);
//draw_item
int row = num_eye * 2;
for (int i = 0; i < row; i++)
{
float tmp = eye_kps[i * 3];
eye_kps[i * 3] = eye_kps[i * 3 + 1] * rescale;
eye_kps[i * 3 + 1] = tmp * rescale;
eye_kps[i * 3 + 2] *= rescale;
}
//angles_and_vec_from_eye
int slice = num_eye * 3;
float[] theta_x_y_vec_l = new float[5];
float[] eye_kps_l = new float[481 * 3];
float[] eye_kps_r = new float[481 * 3];
Array.Copy(eye_kps, 0, eye_kps_l, 0, 481 * 3);
Array.Copy(eye_kps, 481 * 3, eye_kps_r, 0, 481 * 3);
angles_and_vec_from_eye(eye_kps_l, iris_idx_481, theta_x_y_vec_l);
float[] theta_x_y_vec_r = new float[5];
angles_and_vec_from_eye(eye_kps_r, iris_idx_481, theta_x_y_vec_r);
float[] gaze_pred = new float[] { (float)((theta_x_y_vec_l[0] + theta_x_y_vec_r[0]) * 0.5), (float)((theta_x_y_vec_l[1] + theta_x_y_vec_r[1]) * 0.5) };
float diag = (float)Math.Sqrt((float)eimg.Rows * eimg.Cols);
float[] eye_pos_left = new float[] { 0, 0 };
float[] eye_pos_right = new float[] { 0, 0 };
for (int i = 0; i < 8; i++)
{
int ind = iris_idx_481[i];
eye_pos_left[0] += eye_kps[ind * 3];
eye_pos_left[1] += eye_kps[ind * 3 + 1];
eye_pos_right[0] += eye_kps[slice + ind * 3];
eye_pos_right[1] += eye_kps[slice + ind * 3 + 1];
}
eye_pos_left[0] /= 8;
eye_pos_left[1] /= 8;
eye_pos_right[0] /= 8;
eye_pos_right[1] /= 8;
float dx = (float)(0.4 * diag * Math.Sin(theta_x_y_vec_l[1]));
float dy = (float)(0.4 * diag * Math.Sin(theta_x_y_vec_l[0]));
Point eye_left_a = new Point(eye_pos_left[1], eye_pos_left[0]); 左眼的箭头线的起始点坐标
Point eye_left_b = new Point(eye_pos_left[1] + dx, eye_pos_left[0] + dy); 左右的箭头线的终点坐标
Cv2.ArrowedLine(eimg, eye_left_a, eye_left_b, new Scalar(0, 0, 255), 5, LineTypes.AntiAlias, 0, 0.18);
float yaw_deg_l = (float)(theta_x_y_vec_l[1] * (180 / Math.PI));
float pitch_deg_l = (float)(-theta_x_y_vec_l[0] * (180 / Math.PI));
dx = (float)(0.4 * diag * Math.Sin(theta_x_y_vec_r[1]));
dy = (float)(0.4 * diag * Math.Sin(theta_x_y_vec_r[0]));
Point eye_right_a = new Point(eye_pos_right[1], eye_pos_right[0]); 右眼的箭头线的起始点坐标
Point eye_right_b = new Point(eye_pos_right[1] + dx, eye_pos_right[0] + dy); 右眼的箭头线的终点坐标
Cv2.ArrowedLine(eimg, eye_right_a, eye_right_b, new Scalar(0, 0, 255), 5, LineTypes.AntiAlias, 0, 0.18);
float yaw_deg_r = (float)(theta_x_y_vec_r[1] * (180 / Math.PI));
float pitch_deg_r = (float)(-theta_x_y_vec_r[0] * (180 / Math.PI));
Cv2.Resize(eimg, eimg, new Size(srcimg.Cols, srcimg.Rows));
//draw Yaw, Pitch
string label = String.Format("L-Yaw : {0:f2}", yaw_deg_l);
sb.AppendLine(label);
Cv2.PutText(eimg, label, new Point(eimg.Cols - 200, 30), HersheyFonts.HersheySimplex, 0.7, new Scalar(0, 255, 0), 2);
label = String.Format("L-Pitch :{0:f2}", pitch_deg_l);
sb.AppendLine(label);
Cv2.PutText(eimg, label, new Point(eimg.Cols - 200, 60), HersheyFonts.HersheySimplex, 0.7, new Scalar(0, 255, 0), 2);
label = String.Format("R-Yaw : {0:f2}", yaw_deg_r);
sb.AppendLine(label);
Cv2.PutText(eimg, label, new Point(eimg.Cols - 200, 90), HersheyFonts.HersheySimplex, 0.7, new Scalar(0, 255, 0), 2);
label = String.Format("R-Pitch : {0:f2}", pitch_deg_r);
sb.AppendLine(label);
Cv2.PutText(eimg, label, new Point(eimg.Cols - 200, 120), HersheyFonts.HersheySimplex, 0.7, new Scalar(0, 255, 0), 2);
info = sb.ToString();
return eimg;
}
public Mat Normalize(Mat src)
{
Mat[] bgr = src.Split();
for (int i = 0; i < bgr.Length; ++i)
{
bgr[i].ConvertTo(bgr[i], MatType.CV_32FC1, 1.0 / (255.0 * std[i]), (0.0 - mean[i]) / std[i]);
}
Cv2.Merge(bgr, src);
foreach (Mat channel in bgr)
{
channel.Dispose();
}
return src;
}
/// <summary>
/// 输入参数eye的形状是(481,3)
/// 输入参数iris_lms_idx的长度shi
/// 输出theta_x_y_vec的长度是5, 分别是theta_x, theta_y, vec[0], vec[1], vec[2]
/// </summary>
void angles_and_vec_from_eye(float[] eye, int[] iris_lms_idx, float[] theta_x_y_vec)
{
float[] mean = new float[] { 0, 0, 0 };
for (int i = 0; i < 32; i++)
{
mean[0] += eye[i * 3];
mean[1] += eye[i * 3 + 1];
mean[2] += eye[i * 3 + 2];
}
mean[0] /= 32;
mean[1] /= 32;
mean[2] /= 32;
float[] p_iris = new float[8 * 3];
for (int i = 0; i < 8; i++)
{
int ind = iris_lms_idx[i];
p_iris[i * 3] = eye[ind * 3] - mean[0];
p_iris[i * 3 + 1] = eye[ind * 3 + 1] - mean[1];
p_iris[i * 3 + 2] = eye[ind * 3 + 2] - mean[2];
}
float[] mean_p_iris = new float[] { 0, 0, 0 };
for (int i = 0; i < 8; i++)
{
mean_p_iris[0] += p_iris[i * 3];
mean_p_iris[1] += p_iris[i * 3 + 1];
mean_p_iris[2] += p_iris[i * 3 + 2];
}
mean_p_iris[0] /= 8;
mean_p_iris[1] /= 8;
mean_p_iris[2] /= 8;
float l2norm_p_iris = (float)Math.Sqrt(mean_p_iris[0] * mean_p_iris[0] + mean_p_iris[1] * mean_p_iris[1] + mean_p_iris[2] * mean_p_iris[2]);
theta_x_y_vec[2] = mean_p_iris[0] / l2norm_p_iris; ///vec[0]
theta_x_y_vec[3] = mean_p_iris[1] / l2norm_p_iris; ///vec[1]
theta_x_y_vec[4] = mean_p_iris[2] / l2norm_p_iris; ///vec[2]
//angles_from_vec
float x = -theta_x_y_vec[4];
float y = theta_x_y_vec[3];
float z = -theta_x_y_vec[2];
float theta = (float)Math.Atan2(y, x);
float phi = (float)(Math.Atan2(Math.Sqrt(x * x + y * y), z) - Math.PI * 0.5);
theta_x_y_vec[0] = phi;
theta_x_y_vec[1] = theta;
}
}下载
源码下载