一、背景
机器人方向,不止期刊TRO,TASE,RAM,RAL上的成果被认可,机器人顶会上的成果也是非常好的。当决定要写一篇IROS论文时,结果IROS论文模板和投稿须知找了半天才找到,且意外发现了一个特别好的官方网站,记录了全年机器人会议的相关信息,非常的nice,特分享给大家。
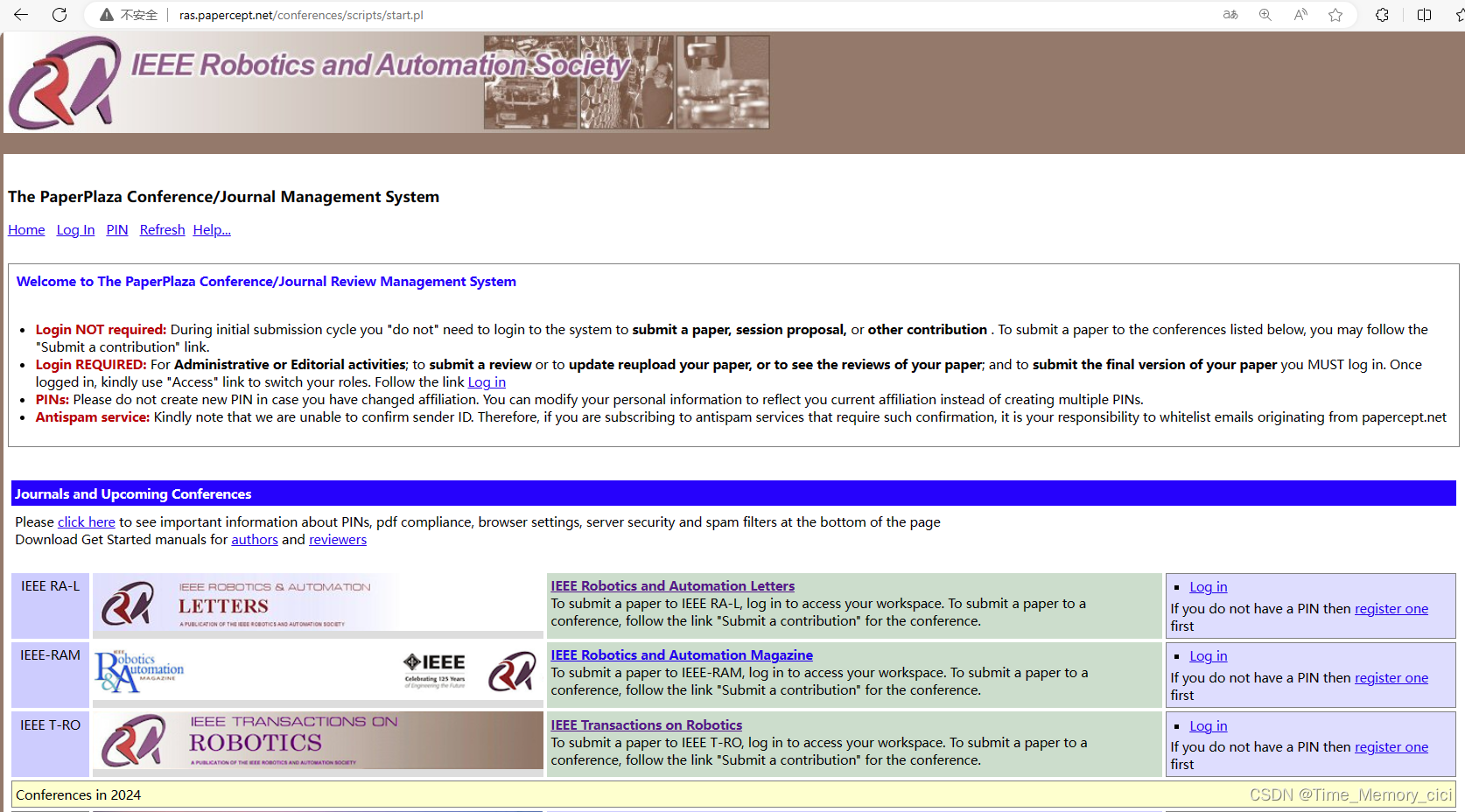
网址:https://ras.papercept.net/conferences/scripts/start.pl,这是RAS协会的官方网址,其旗舰期刊TRO,TASE,和旗舰会议IROS,ICRA都是由RAS协会主办。
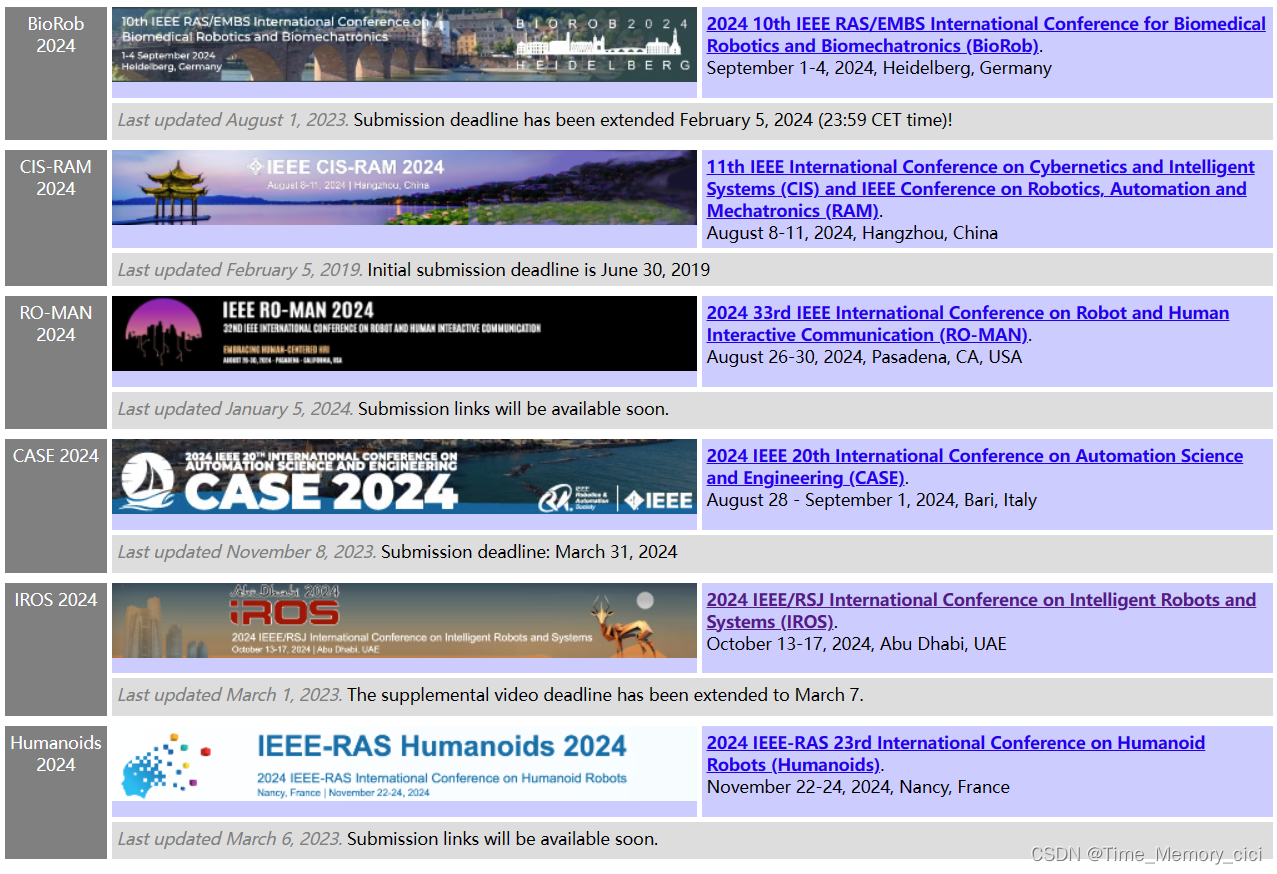
点击home即可查看全年机器人的会议,包括举办时间和地点。
注意:这里举办时间不是投稿截止时间,关于具体会议的deadline可以自行查阅。
一般情况,IROS会议的投稿截止时间是每年的3月1号,所以留给我们的时间不多了~~
二、IROS论文模板下载
1. 进入网站https://ras.papercept.net/conferences/scripts/start.pl,点击Help中的Support
此时可以看到准备手稿的一些重要信息,我总结以下几点:
a)作者有责任确保稿件符合会议要求;
b)准备Word或LaTeX源文件时请务必使用会议提供的模板;
c)好像无论是Word、LaTeX或PDF都需要经过转换,变成会议兼容的PDF,还有就是务必检查经系统转换的每个文件是否存在无意的更改或缺陷。
d)在开始准备手稿前,一定要先下载会议模板
 e)测试PDF:通常我们使用latex写完文章后,编译生成PDF就以为结束了,但这里不可以,需要有一步测试PDF的过程,点击
e)测试PDF:通常我们使用latex写完文章后,编译生成PDF就以为结束了,但这里不可以,需要有一步测试PDF的过程,点击 Test your pdf document,其实也不用担心,就是检查一些格式,字体方面的错误。
2. 点击Support menu中的LaTeX Support,下载会议模板
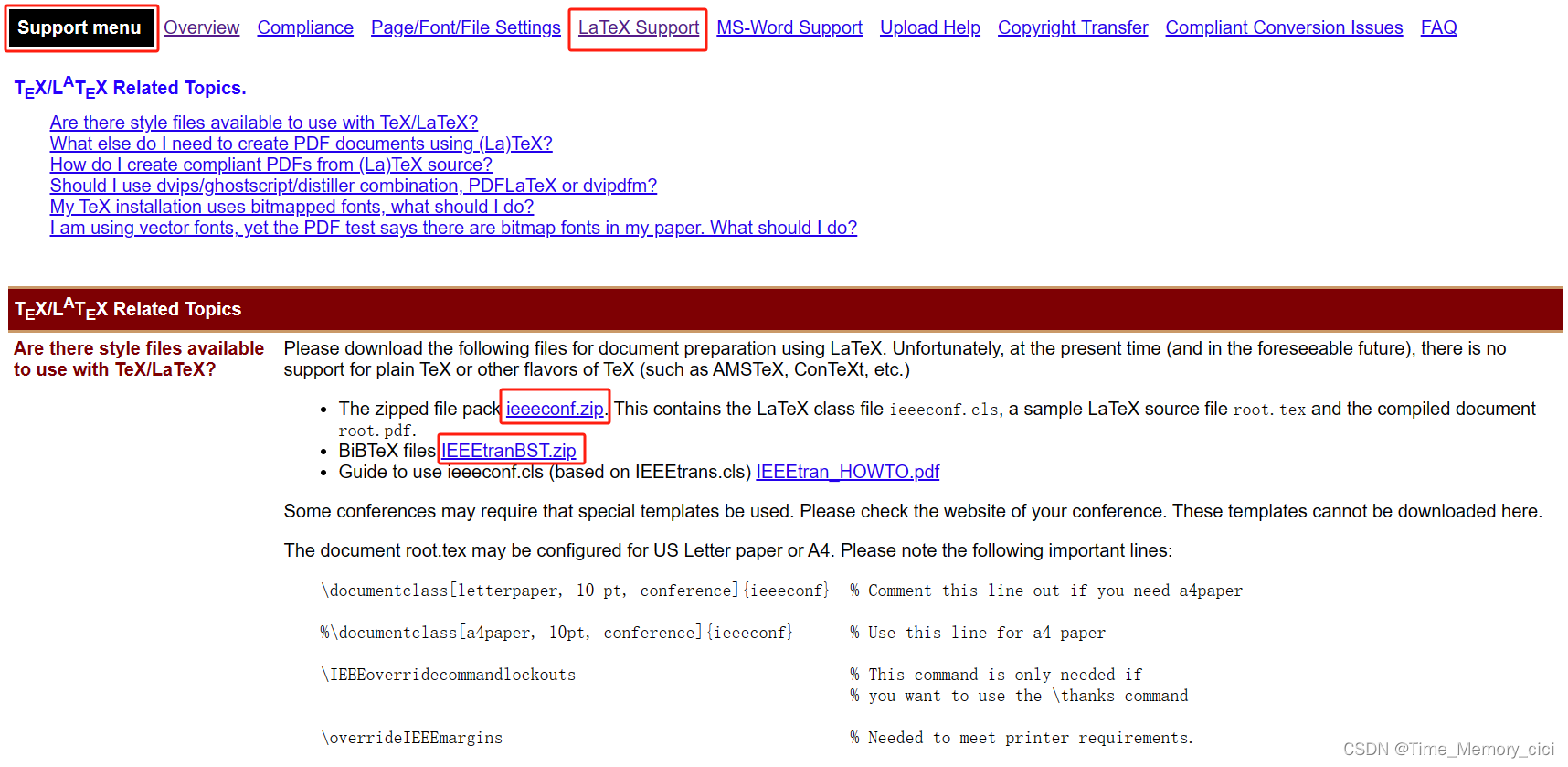
下载 ieeeconf.zip和IEEEtranBST.zip,第一个是论文latex模板,第二个参考文献格式。
注意:该网站表示有些会议可能需要使用特殊模板,请检查所投会议网站, 这些模板无法在此处下载。但我去IROS网站,没有关于会议模板的内容,只有海报和PPT的模板,所以IROS应该没有特殊要求,放心使用这个模板就可以。
三、小知识,机器人会议排名
RSS>IROS>ICRA>CASE>Humanoids
个人排名,不喜勿喷哈
RSS全称:Robotics: Science and Systems ,好多人不知道这个会议,其实这个会议很难中,论文质量也高于IROS和ICRA。中国学者中这个会议的少之又少,外国人投的比较多。该会议自2005年起每年举办一次,由机器人学会(IEEE Robotics and Automation Society)和机器人科学与系统学会(Robotics Society of America)联合主办,旨在促进机器人领域的科学研究和技术应用的发展。RSS会议的论文录用率非常低,通常只有20%左右。