一、问题描述
已知点P(x,y)和多边形polygon,判断点P(x,y)是否在多边形内部。
二、解决方案
射线法
以点P为端点,向左方作射线L,由于多边形是有界的,所以射线L的左端一定在多边形外部。考虑沿着L从无究远处开始自左向右移动,遇到和多边形的第一个交点的时候,进入到了多边形的内部,遇到第二个交点的时候,离开了多边形。因而当L和多边形的交点数目C是奇数的时候,P在多边形内,是偶数,则P在多边形外。
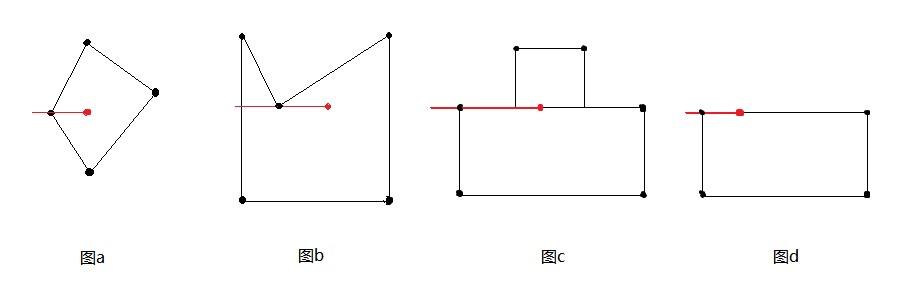
特殊情况分析,如图下图(a),(b),(c),(d)所示。
1 图(a)中,L和多边形的顶点相交,交点只能计算一个。
2 图(b)中,L和多边形顶点的交点不应被计算。
3 图(c)和(d)中,L和多边形的一条边重合,这条边应该被忽略不计。
三、代码实现
//判断点是否在多边形内部/
// The function will return YES if the point x,y is inside the polygon, or
// NO if it is not. If the point is exactly on the edge of the polygon,
// then the function may return YES or NO.
bool IsPointInPolygon(const std::vector<cv::Point> &poly, const cv::Point &pt)
{
int i, j;
bool c = false;
int count = poly.size();
for (i = 0, j = count - 1; i < count; j = i++)
{
if ((((poly[i].y <= pt.y) && (pt.y < poly[j].y)) ||
((poly[j].y <= pt.y) && (pt.y < poly[i].y)))
&& (pt.x < (poly[j].x - poly[i].x) * (pt.y - poly[i].y) / (poly[j].y - poly[i].y) + poly[i].x))
{
c = !c;
}
}
return c;
}代码分析
条件1
((ploy[i].y <= pt.y) && (pt.y < poly[j].y)) || ((ploy[j].y <= pt.y) && (pt.y < poly[i].y))
由于判断过程主要是判断,射线L与多边形每条边是否存在交点,而射线L平行于X轴,因此条件1相当于判断点P在Pi和Pj在垂直距离之间。
条件2
(pt.x < (poly[j].x - poly[i].x) * (pt.y - poly[i].y)/(poly[j].y - poly[i].y) + poly[i].x)
条件2可转换成:(pt.x - poly[i].x) * (poly[j].y - poly[i].y) - (poly[j].x - poly[i].x) * (pt.y - poly[i].y) < 0,相当于向量PiP和向量PiPj的叉积。
当向量PiP和向量PiPj的叉积小于0时,向量PiP在向量PiPj的逆时针方向,相当于向量PiP在向量PiPj的右侧,而射线L由左侧射出,而且点P在Pi和Pj在垂直距离之间,因此,射线L和PiPj的跨立条件成立,相交。
四、参考资料
http://alienryderflex.com/polygon/
https://www.cnblogs.com/dwdxdy/p/3230647.html