前言
大家好,我是Snu77,这里是RT-DETR有效涨点专栏。
本专栏的内容为根据ultralytics版本的RT-DETR进行改进,内容持续更新,每周更新文章数量3-10篇。
专栏以ResNet18、ResNet50为基础修改版本,同时修改内容也支持ResNet32、ResNet101和PPHGNet版本,其中ResNet为RT-DETR官方版本1:1移植过来的,参数量基本保持一致(误差很小很小),不同于ultralytics仓库版本的ResNet官方版本,同时ultralytics仓库的一些参数是和RT-DETR相冲的所以我也是会教大家调好一些参数和代码,真正意义上的跑ultralytics的和RT-DETR官方版本的无区别
👑欢迎大家订阅本专栏,一起学习RT-DETR👑
一、本文介绍
本文给大家带来的改进机制是Google发布的EfficientNetV1主干网络,其主要思想是通过均衡地缩放网络的深度、宽度和分辨率,以提高卷积神经网络的性能。该主干使用一个复合系数来统一地缩放网络的深度、宽度和分辨率,实现更均衡的网络扩展从而提高性能。同时我提供多种该网络的版本可以满足不同读者的需求。本文首先通过介绍其主要框架原理,然后教大家如何添加该网络结构到网络模型中,并附上yaml文件和运行代码,使用该网络参数量下降百分之三十以上,精度却能提两个点!

专栏链接:RT-DETR剑指论文专栏,持续复现各种顶会内容——论文收割机RT-DETR
目录
一、本文介绍
二、EfficientNetV1的框架原理
三、EfficientNetV1的核心代码
四、手把手教你添加EfficientNetV1机制
4.1 修改一
4.2 修改二
4.3 修改三
4.4 修改四
4.5 修改五
4.6 修改六
4.7 修改七
4.8 修改八
4.9 RT-DETR不能打印计算量问题的解决
4.10 可选修改
五、EfficientNetV1的yaml文件
5.1 yaml文件
5.2 运行文件
5.3 成功训练截图
六、全文总结
二、EfficientNetV1的框架原理

官方论文地址: 官方论文地址点击即可跳转
官方代码地址: 官方代码地址点击即可跳转
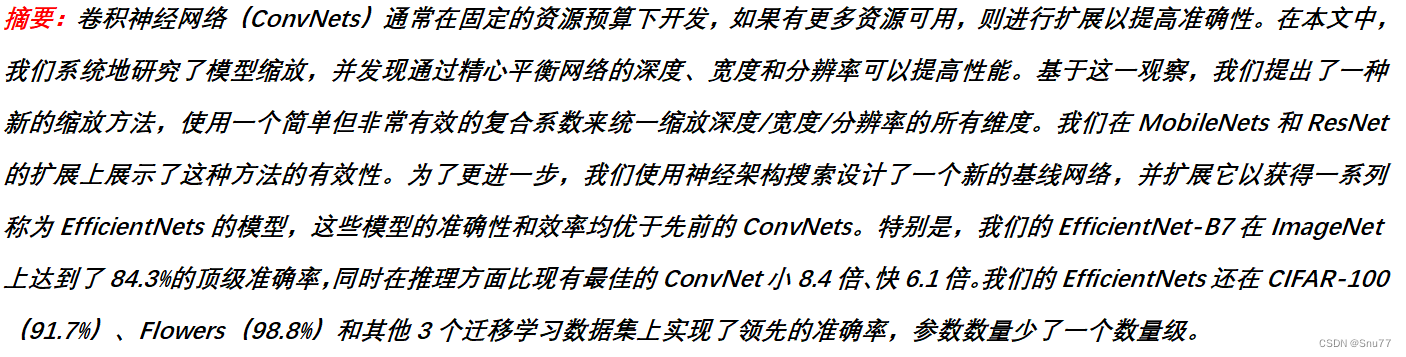
EfficientNetV1的主要思想是通过均衡地缩放网络的深度、宽度和分辨率,以提高卷积神经网络的性能。这种方法采用了一个简单但有效的复合系数,统一调整所有维度。EfficientNet在多个方面优于现有的ConvNets,特别是在ImageNet数据集上,EfficientNet-B7模型在保持较小的大小和更快的推理速度的同时,达到了84.3%的顶级准确率。此外,EfficientNet还在CIFAR-100和Flowers等其他数据集上展示了出色的迁移学习性能,参数数量大大减少。
总结:EfficientNetV1的主要创新为提出了一种新的模型缩放方法,该方法使用一个复合系数来统一地缩放网络的深度、宽度和分辨率,实现更均衡的网络扩展
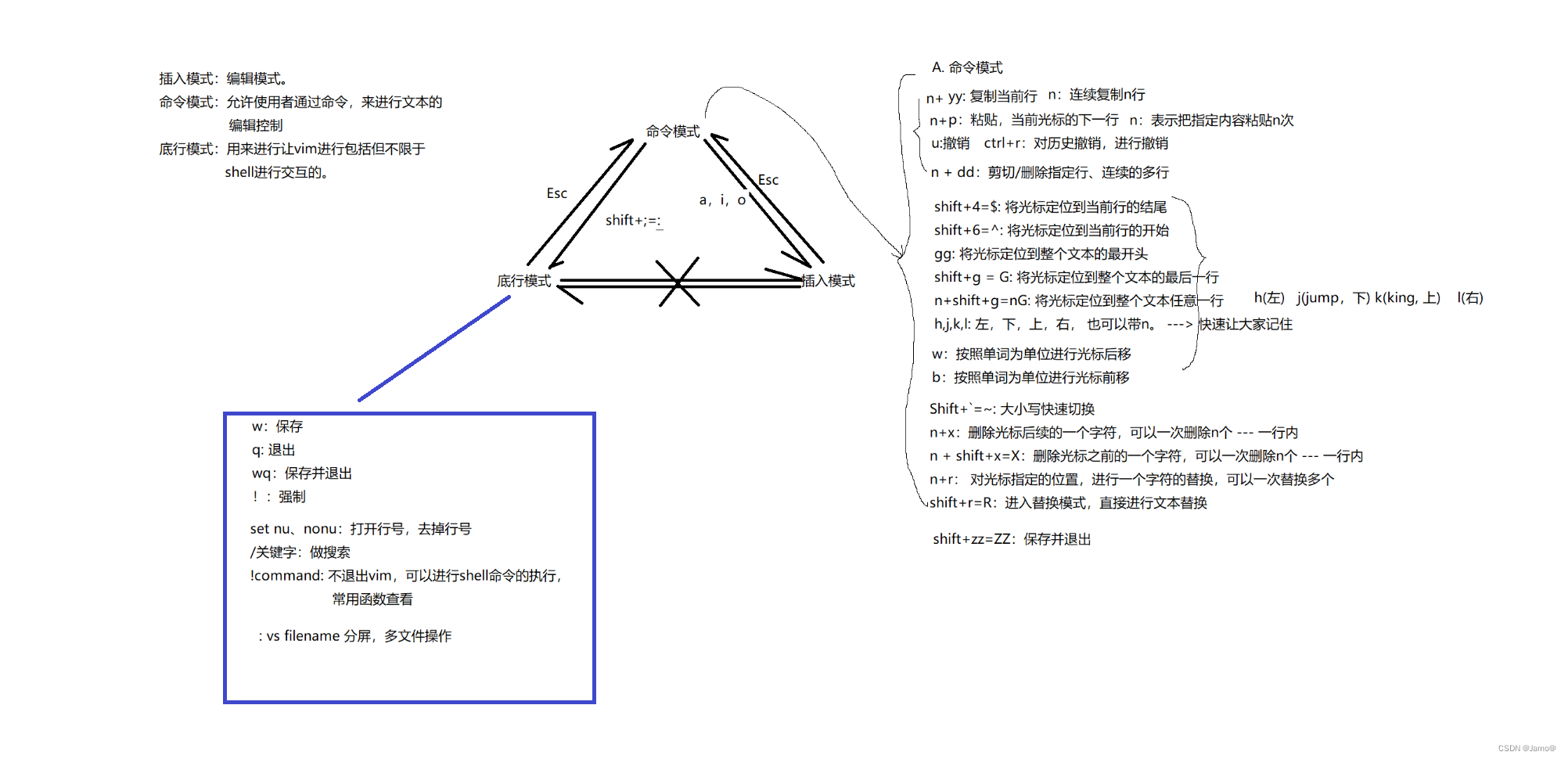
 这张图展示了EfficientNet提出的模型缩放方法。图中(a)表示基线网络,而图(b)-(d)表示传统的缩放方法,只增加网络的一个维度:宽度、深度或分辨率。图(e)展示了EfficientNet的创新之处,即复合缩放方法,它使用固定比例同时均匀地缩放网络的所有三个维度。
这张图展示了EfficientNet提出的模型缩放方法。图中(a)表示基线网络,而图(b)-(d)表示传统的缩放方法,只增加网络的一个维度:宽度、深度或分辨率。图(e)展示了EfficientNet的创新之处,即复合缩放方法,它使用固定比例同时均匀地缩放网络的所有三个维度。
三、EfficientNetV1的核心代码
import re
import math
import collections
from functools import partial
import torch
from torch import nn
from torch.nn import functional as F
from torch.utils import model_zoo
__all__ = ['efficient']
# Parameters for the entire model (stem, all blocks, and head)
GlobalParams = collections.namedtuple('GlobalParams', [
'width_coefficient', 'depth_coefficient', 'image_size', 'dropout_rate',
'num_classes', 'batch_norm_momentum', 'batch_norm_epsilon',
'drop_connect_rate', 'depth_divisor', 'min_depth', 'include_top'])
# Parameters for an individual model block
BlockArgs = collections.namedtuple('BlockArgs', [
'num_repeat', 'kernel_size', 'stride', 'expand_ratio',
'input_filters', 'output_filters', 'se_ratio', 'id_skip'])
# Set GlobalParams and BlockArgs's defaults
GlobalParams.__new__.__defaults__ = (None,) * len(GlobalParams._fields)
BlockArgs.__new__.__defaults__ = (None,) * len(BlockArgs._fields)
# Swish activation function
if hasattr(nn, 'SiLU'):
Swish = nn.SiLU
else:
# For compatibility with old PyTorch versions
class Swish(nn.Module):
def forward(self, x):
return x * torch.sigmoid(x)
# A memory-efficient implementation of Swish function
class SwishImplementation(torch.autograd.Function):
@staticmethod
def forward(ctx, i):
result = i * torch.sigmoid(i)
ctx.save_for_backward(i)
return result
@staticmethod
def backward(ctx, grad_output):
i = ctx.saved_tensors[0]
sigmoid_i = torch.sigmoid(i)
return grad_output * (sigmoid_i * (1 + i * (1 - sigmoid_i)))
class MemoryEfficientSwish(nn.Module):
def forward(self, x):
return SwishImplementation.apply(x)
def round_filters(filters, global_params):
"""Calculate and round number of filters based on width multiplier.
Use width_coefficient, depth_divisor and min_depth of global_params.
Args:
filters (int): Filters number to be calculated.
global_params (namedtuple): Global params of the model.
Returns:
new_filters: New filters number after calculating.
"""
multiplier = global_params.width_coefficient
if not multiplier:
return filters
# TODO: modify the params names.
# maybe the names (width_divisor,min_width)
# are more suitable than (depth_divisor,min_depth).
divisor = global_params.depth_divisor
min_depth = global_params.min_depth
filters *= multiplier
min_depth = min_depth or divisor # pay attention to this line when using min_depth
# follow the formula transferred from official TensorFlow implementation
new_filters = max(min_depth, int(filters + divisor / 2) // divisor * divisor)
if new_filters < 0.9 * filters: # prevent rounding by more than 10%
new_filters += divisor
return int(new_filters)
def round_repeats(repeats, global_params):
"""Calculate module's repeat number of a block based on depth multiplier.
Use depth_coefficient of global_params.
Args:
repeats (int): num_repeat to be calculated.
global_params (namedtuple): Global params of the model.
Returns:
new repeat: New repeat number after calculating.
"""
multiplier = global_params.depth_coefficient
if not multiplier:
return repeats
# follow the formula transferred from official TensorFlow implementation
return int(math.ceil(multiplier * repeats))
def drop_connect(inputs, p, training):
"""Drop connect.
Args:
input (tensor: BCWH): Input of this structure.
p (float: 0.0~1.0): Probability of drop connection.
training (bool): The running mode.
Returns:
output: Output after drop connection.
"""
assert 0 <= p <= 1, 'p must be in range of [0,1]'
if not training:
return inputs
batch_size = inputs.shape[0]
keep_prob = 1 - p
# generate binary_tensor mask according to probability (p for 0, 1-p for 1)
random_tensor = keep_prob
random_tensor += torch.rand([batch_size, 1, 1, 1], dtype=inputs.dtype, device=inputs.device)
binary_tensor = torch.floor(random_tensor)
output = inputs / keep_prob * binary_tensor
return output
def get_width_and_height_from_size(x):
"""Obtain height and width from x.
Args:
x (int, tuple or list): Data size.
Returns:
size: A tuple or list (H,W).
"""
if isinstance(x, int):
return x, x
if isinstance(x, list) or isinstance(x, tuple):
return x
else:
raise TypeError()
def calculate_output_image_size(input_image_size, stride):
"""Calculates the output image size when using Conv2dSamePadding with a stride.
Necessary for static padding. Thanks to mannatsingh for pointing this out.
Args:
input_image_size (int, tuple or list): Size of input image.
stride (int, tuple or list): Conv2d operation's stride.
Returns:
output_image_size: A list [H,W].
"""
if input_image_size is None:
return None
image_height, image_width = get_width_and_height_from_size(input_image_size)
stride = stride if isinstance(stride, int) else stride[0]
image_height = int(math.ceil(image_height / stride))
image_width = int(math.ceil(image_width / stride))
return [image_height, image_width]
# Note:
# The following 'SamePadding' functions make output size equal ceil(input size/stride).
# Only when stride equals 1, can the output size be the same as input size.
# Don't be confused by their function names ! ! !
def get_same_padding_conv2d(image_size=None):
"""Chooses static padding if you have specified an image size, and dynamic padding otherwise.
Static padding is necessary for ONNX exporting of models.
Args:
image_size (int or tuple): Size of the image.
Returns:
Conv2dDynamicSamePadding or Conv2dStaticSamePadding.
"""
if image_size is None:
return Conv2dDynamicSamePadding
else:
return partial(Conv2dStaticSamePadding, image_size=image_size)
class Conv2dDynamicSamePadding(nn.Conv2d):
"""2D Convolutions like TensorFlow, for a dynamic image size.
The padding is operated in forward function by calculating dynamically.
"""
# Tips for 'SAME' mode padding.
# Given the following:
# i: width or height
# s: stride
# k: kernel size
# d: dilation
# p: padding
# Output after Conv2d:
# o = floor((i+p-((k-1)*d+1))/s+1)
# If o equals i, i = floor((i+p-((k-1)*d+1))/s+1),
# => p = (i-1)*s+((k-1)*d+1)-i
def __init__(self, in_channels, out_channels, kernel_size, stride=1, dilation=1, groups=1, bias=True):
super().__init__(in_channels, out_channels, kernel_size, stride, 0, dilation, groups, bias)
self.stride = self.stride if len(self.stride) == 2 else [self.stride[0]] * 2
def forward(self, x):
ih, iw = x.size()[-2:]
kh, kw = self.weight.size()[-2:]
sh, sw = self.stride
oh, ow = math.ceil(ih / sh), math.ceil(iw / sw) # change the output size according to stride ! ! !
pad_h = max((oh - 1) * self.stride[0] + (kh - 1) * self.dilation[0] + 1 - ih, 0)
pad_w = max((ow - 1) * self.stride[1] + (kw - 1) * self.dilation[1] + 1 - iw, 0)
if pad_h > 0 or pad_w > 0:
x = F.pad(x, [pad_w // 2, pad_w - pad_w // 2, pad_h // 2, pad_h - pad_h // 2])
return F.conv2d(x, self.weight, self.bias, self.stride, self.padding, self.dilation, self.groups)
class Conv2dStaticSamePadding(nn.Conv2d):
"""2D Convolutions like TensorFlow's 'SAME' mode, with the given input image size.
The padding mudule is calculated in construction function, then used in forward.
"""
# With the same calculation as Conv2dDynamicSamePadding
def __init__(self, in_channels, out_channels, kernel_size, stride=1, image_size=None, **kwargs):
super().__init__(in_channels, out_channels, kernel_size, stride, **kwargs)
self.stride = self.stride if len(self.stride) == 2 else [self.stride[0]] * 2
# Calculate padding based on image size and save it
assert image_size is not None
ih, iw = (image_size, image_size) if isinstance(image_size, int) else image_size
kh, kw = self.weight.size()[-2:]
sh, sw = self.stride
oh, ow = math.ceil(ih / sh), math.ceil(iw / sw)
pad_h = max((oh - 1) * self.stride[0] + (kh - 1) * self.dilation[0] + 1 - ih, 0)
pad_w = max((ow - 1) * self.stride[1] + (kw - 1) * self.dilation[1] + 1 - iw, 0)
if pad_h > 0 or pad_w > 0:
self.static_padding = nn.ZeroPad2d((pad_w // 2, pad_w - pad_w // 2,
pad_h // 2, pad_h - pad_h // 2))
else:
self.static_padding = nn.Identity()
def forward(self, x):
x = self.static_padding(x)
x = F.conv2d(x, self.weight, self.bias, self.stride, self.padding, self.dilation, self.groups)
return x
def get_same_padding_maxPool2d(image_size=None):
"""Chooses static padding if you have specified an image size, and dynamic padding otherwise.
Static padding is necessary for ONNX exporting of models.
Args:
image_size (int or tuple): Size of the image.
Returns:
MaxPool2dDynamicSamePadding or MaxPool2dStaticSamePadding.
"""
if image_size is None:
return MaxPool2dDynamicSamePadding
else:
return partial(MaxPool2dStaticSamePadding, image_size=image_size)
class MaxPool2dDynamicSamePadding(nn.MaxPool2d):
"""2D MaxPooling like TensorFlow's 'SAME' mode, with a dynamic image size.
The padding is operated in forward function by calculating dynamically.
"""
def __init__(self, kernel_size, stride, padding=0, dilation=1, return_indices=False, ceil_mode=False):
super().__init__(kernel_size, stride, padding, dilation, return_indices, ceil_mode)
self.stride = [self.stride] * 2 if isinstance(self.stride, int) else self.stride
self.kernel_size = [self.kernel_size] * 2 if isinstance(self.kernel_size, int) else self.kernel_size
self.dilation = [self.dilation] * 2 if isinstance(self.dilation, int) else self.dilation
def forward(self, x):
ih, iw = x.size()[-2:]
kh, kw = self.kernel_size
sh, sw = self.stride
oh, ow = math.ceil(ih / sh), math.ceil(iw / sw)
pad_h = max((oh - 1) * self.stride[0] + (kh - 1) * self.dilation[0] + 1 - ih, 0)
pad_w = max((ow - 1) * self.stride[1] + (kw - 1) * self.dilation[1] + 1 - iw, 0)
if pad_h > 0 or pad_w > 0:
x = F.pad(x, [pad_w // 2, pad_w - pad_w // 2, pad_h // 2, pad_h - pad_h // 2])
return F.max_pool2d(x, self.kernel_size, self.stride, self.padding,
self.dilation, self.ceil_mode, self.return_indices)
class MaxPool2dStaticSamePadding(nn.MaxPool2d):
"""2D MaxPooling like TensorFlow's 'SAME' mode, with the given input image size.
The padding mudule is calculated in construction function, then used in forward.
"""
def __init__(self, kernel_size, stride, image_size=None, **kwargs):
super().__init__(kernel_size, stride, **kwargs)
self.stride = [self.stride] * 2 if isinstance(self.stride, int) else self.stride
self.kernel_size = [self.kernel_size] * 2 if isinstance(self.kernel_size, int) else self.kernel_size
self.dilation = [self.dilation] * 2 if isinstance(self.dilation, int) else self.dilation
# Calculate padding based on image size and save it
assert image_size is not None
ih, iw = (image_size, image_size) if isinstance(image_size, int) else image_size
kh, kw = self.kernel_size
sh, sw = self.stride
oh, ow = math.ceil(ih / sh), math.ceil(iw / sw)
pad_h = max((oh - 1) * self.stride[0] + (kh - 1) * self.dilation[0] + 1 - ih, 0)
pad_w = max((ow - 1) * self.stride[1] + (kw - 1) * self.dilation[1] + 1 - iw, 0)
if pad_h > 0 or pad_w > 0:
self.static_padding = nn.ZeroPad2d((pad_w // 2, pad_w - pad_w // 2, pad_h // 2, pad_h - pad_h // 2))
else:
self.static_padding = nn.Identity()
def forward(self, x):
x = self.static_padding(x)
x = F.max_pool2d(x, self.kernel_size, self.stride, self.padding,
self.dilation, self.ceil_mode, self.return_indices)
return x
################################################################################
# Helper functions for loading model params
################################################################################
# BlockDecoder: A Class for encoding and decoding BlockArgs
# efficientnet_params: A function to query compound coefficient
# get_model_params and efficientnet:
# Functions to get BlockArgs and GlobalParams for efficientnet
# url_map and url_map_advprop: Dicts of url_map for pretrained weights
# load_pretrained_weights: A function to load pretrained weights
class BlockDecoder(object):
"""Block Decoder for readability,
straight from the official TensorFlow repository.
"""
@staticmethod
def _decode_block_string(block_string):
"""Get a block through a string notation of arguments.
Args:
block_string (str): A string notation of arguments.
Examples: 'r1_k3_s11_e1_i32_o16_se0.25_noskip'.
Returns:
BlockArgs: The namedtuple defined at the top of this file.
"""
assert isinstance(block_string, str)
ops = block_string.split('_')
options = {}
for op in ops:
splits = re.split(r'(\d.*)', op)
if len(splits) >= 2:
key, value = splits[:2]
options[key] = value
# Check stride
assert (('s' in options and len(options['s']) == 1) or
(len(options['s']) == 2 and options['s'][0] == options['s'][1]))
return BlockArgs(
num_repeat=int(options['r']),
kernel_size=int(options['k']),
stride=[int(options['s'][0])],
expand_ratio=int(options['e']),
input_filters=int(options['i']),
output_filters=int(options['o']),
se_ratio=float(options['se']) if 'se' in options else None,
id_skip=('noskip' not in block_string))
@staticmethod
def _encode_block_string(block):
"""Encode a block to a string.
Args:
block (namedtuple): A BlockArgs type argument.
Returns:
block_string: A String form of BlockArgs.
"""
args = [
'r%d' % block.num_repeat,
'k%d' % block.kernel_size,
's%d%d' % (block.strides[0], block.strides[1]),
'e%s' % block.expand_ratio,
'i%d' % block.input_filters,
'o%d' % block.output_filters
]
if 0 < block.se_ratio <= 1:
args.append('se%s' % block.se_ratio)
if block.id_skip is False:
args.append('noskip')
return '_'.join(args)
@staticmethod
def decode(string_list):
"""Decode a list of string notations to specify blocks inside the network.
Args:
string_list (list[str]): A list of strings, each string is a notation of block.
Returns:
blocks_args: A list of BlockArgs namedtuples of block args.
"""
assert isinstance(string_list, list)
blocks_args = []
for block_string in string_list:
blocks_args.append(BlockDecoder._decode_block_string(block_string))
return blocks_args
@staticmethod
def encode(blocks_args):
"""Encode a list of BlockArgs to a list of strings.
Args:
blocks_args (list[namedtuples]): A list of BlockArgs namedtuples of block args.
Returns:
block_strings: A list of strings, each string is a notation of block.
"""
block_strings = []
for block in blocks_args:
block_strings.append(BlockDecoder._encode_block_string(block))
return block_strings
def efficientnet_params(model_name):
"""Map EfficientNet model name to parameter coefficients.
Args:
model_name (str): Model name to be queried.
Returns:
params_dict[model_name]: A (width,depth,res,dropout) tuple.
"""
params_dict = {
# Coefficients: width,depth,res,dropout
'efficientnet-b0': (1.0, 1.0, 224, 0.2),
'efficientnet-b1': (1.0, 1.1, 240, 0.2),
'efficientnet-b2': (1.1, 1.2, 260, 0.3),
'efficientnet-b3': (1.2, 1.4, 300, 0.3),
'efficientnet-b4': (1.4, 1.8, 380, 0.4),
'efficientnet-b5': (1.6, 2.2, 456, 0.4),
'efficientnet-b6': (1.8, 2.6, 528, 0.5),
'efficientnet-b7': (2.0, 3.1, 600, 0.5),
'efficientnet-b8': (2.2, 3.6, 672, 0.5),
'efficientnet-l2': (4.3, 5.3, 800, 0.5),
}
return params_dict[model_name]
def efficientnet(width_coefficient=None, depth_coefficient=None, image_size=None,
dropout_rate=0.2, drop_connect_rate=0.2, num_classes=1000, include_top=True):
"""Create BlockArgs and GlobalParams for efficientnet model.
Args:
width_coefficient (float)
depth_coefficient (float)
image_size (int)
dropout_rate (float)
drop_connect_rate (float)
num_classes (int)
Meaning as the name suggests.
Returns:
blocks_args, global_params.
"""
# Blocks args for the whole model(efficientnet-b0 by default)
# It will be modified in the construction of EfficientNet Class according to model
blocks_args = [
'r1_k3_s11_e1_i32_o16_se0.25',
'r2_k3_s22_e6_i16_o24_se0.25',
'r2_k5_s22_e6_i24_o40_se0.25',
'r3_k3_s22_e6_i40_o80_se0.25',
'r3_k5_s11_e6_i80_o112_se0.25',
'r4_k5_s22_e6_i112_o192_se0.25',
'r1_k3_s11_e6_i192_o320_se0.25',
]
blocks_args = BlockDecoder.decode(blocks_args)
global_params = GlobalParams(
width_coefficient=width_coefficient,
depth_coefficient=depth_coefficient,
image_size=image_size,
dropout_rate=dropout_rate,
num_classes=num_classes,
batch_norm_momentum=0.99,
batch_norm_epsilon=1e-3,
drop_connect_rate=drop_connect_rate,
depth_divisor=8,
min_depth=None,
include_top=include_top,
)
return blocks_args, global_params
def get_model_params(model_name, override_params):
"""Get the block args and global params for a given model name.
Args:
model_name (str): Model's name.
override_params (dict): A dict to modify global_params.
Returns:
blocks_args, global_params
"""
if model_name.startswith('efficientnet'):
w, d, s, p = efficientnet_params(model_name)
# note: all models have drop connect rate = 0.2
blocks_args, global_params = efficientnet(
width_coefficient=w, depth_coefficient=d, dropout_rate=p, image_size=s)
else:
raise NotImplementedError('model name is not pre-defined: {}'.format(model_name))
if override_params:
# ValueError will be raised here if override_params has fields not included in global_params.
global_params = global_params._replace(**override_params)
return blocks_args, global_params
# train with Standard methods
# check more details in paper(EfficientNet: Rethinking Model Scaling for Convolutional Neural Networks)
url_map = {
'efficientnet-b0': 'https://github.com/lukemelas/EfficientNet-PyTorch/releases/download/1.0/efficientnet-b0-355c32eb.pth',
'efficientnet-b1': 'https://github.com/lukemelas/EfficientNet-PyTorch/releases/download/1.0/efficientnet-b1-f1951068.pth',
'efficientnet-b2': 'https://github.com/lukemelas/EfficientNet-PyTorch/releases/download/1.0/efficientnet-b2-8bb594d6.pth',
'efficientnet-b3': 'https://github.com/lukemelas/EfficientNet-PyTorch/releases/download/1.0/efficientnet-b3-5fb5a3c3.pth',
'efficientnet-b4': 'https://github.com/lukemelas/EfficientNet-PyTorch/releases/download/1.0/efficientnet-b4-6ed6700e.pth',
'efficientnet-b5': 'https://github.com/lukemelas/EfficientNet-PyTorch/releases/download/1.0/efficientnet-b5-b6417697.pth',
'efficientnet-b6': 'https://github.com/lukemelas/EfficientNet-PyTorch/releases/download/1.0/efficientnet-b6-c76e70fd.pth',
'efficientnet-b7': 'https://github.com/lukemelas/EfficientNet-PyTorch/releases/download/1.0/efficientnet-b7-dcc49843.pth',
}
# train with Adversarial Examples(AdvProp)
# check more details in paper(Adversarial Examples Improve Image Recognition)
url_map_advprop = {
'efficientnet-b0': 'https://github.com/lukemelas/EfficientNet-PyTorch/releases/download/1.0/adv-efficientnet-b0-b64d5a18.pth',
'efficientnet-b1': 'https://github.com/lukemelas/EfficientNet-PyTorch/releases/download/1.0/adv-efficientnet-b1-0f3ce85a.pth',
'efficientnet-b2': 'https://github.com/lukemelas/EfficientNet-PyTorch/releases/download/1.0/adv-efficientnet-b2-6e9d97e5.pth',
'efficientnet-b3': 'https://github.com/lukemelas/EfficientNet-PyTorch/releases/download/1.0/adv-efficientnet-b3-cdd7c0f4.pth',
'efficientnet-b4': 'https://github.com/lukemelas/EfficientNet-PyTorch/releases/download/1.0/adv-efficientnet-b4-44fb3a87.pth',
'efficientnet-b5': 'https://github.com/lukemelas/EfficientNet-PyTorch/releases/download/1.0/adv-efficientnet-b5-86493f6b.pth',
'efficientnet-b6': 'https://github.com/lukemelas/EfficientNet-PyTorch/releases/download/1.0/adv-efficientnet-b6-ac80338e.pth',
'efficientnet-b7': 'https://github.com/lukemelas/EfficientNet-PyTorch/releases/download/1.0/adv-efficientnet-b7-4652b6dd.pth',
'efficientnet-b8': 'https://github.com/lukemelas/EfficientNet-PyTorch/releases/download/1.0/adv-efficientnet-b8-22a8fe65.pth',
}
# TODO: add the petrained weights url map of 'efficientnet-l2'
def load_pretrained_weights(model, model_name, weights_path=None, load_fc=True, advprop=False, verbose=True):
"""Loads pretrained weights from weights path or download using url.
Args:
model (Module): The whole model of efficientnet.
model_name (str): Model name of efficientnet.
weights_path (None or str):
str: path to pretrained weights file on the local disk.
None: use pretrained weights downloaded from the Internet.
load_fc (bool): Whether to load pretrained weights for fc layer at the end of the model.
advprop (bool): Whether to load pretrained weights
trained with advprop (valid when weights_path is None).
"""
if isinstance(weights_path, str):
state_dict = torch.load(weights_path)
else:
# AutoAugment or Advprop (different preprocessing)
url_map_ = url_map_advprop if advprop else url_map
state_dict = model_zoo.load_url(url_map_[model_name])
if load_fc:
ret = model.load_state_dict(state_dict, strict=False)
assert not ret.missing_keys, 'Missing keys when loading pretrained weights: {}'.format(ret.missing_keys)
else:
state_dict.pop('_fc.weight')
state_dict.pop('_fc.bias')
ret = model.load_state_dict(state_dict, strict=False)
assert set(ret.missing_keys) == set(
['_fc.weight', '_fc.bias']), 'Missing keys when loading pretrained weights: {}'.format(ret.missing_keys)
assert not ret.unexpected_keys, 'Missing keys when loading pretrained weights: {}'.format(ret.unexpected_keys)
if verbose:
print('Loaded pretrained weights for {}'.format(model_name))
VALID_MODELS = (
'efficientnet-b0', 'efficientnet-b1', 'efficientnet-b2', 'efficientnet-b3',
'efficientnet-b4', 'efficientnet-b5', 'efficientnet-b6', 'efficientnet-b7',
'efficientnet-b8',
# Support the construction of 'efficientnet-l2' without pretrained weights
'efficientnet-l2'
)
class MBConvBlock(nn.Module):
"""Mobile Inverted Residual Bottleneck Block.
Args:
block_args (namedtuple): BlockArgs, defined in utils.py.
global_params (namedtuple): GlobalParam, defined in utils.py.
image_size (tuple or list): [image_height, image_width].
References:
[1] https://arxiv.org/abs/1704.04861 (MobileNet v1)
[2] https://arxiv.org/abs/1801.04381 (MobileNet v2)
[3] https://arxiv.org/abs/1905.02244 (MobileNet v3)
"""
def __init__(self, block_args, global_params, image_size=None):
super().__init__()
self._block_args = block_args
self._bn_mom = 1 - global_params.batch_norm_momentum # pytorch's difference from tensorflow
self._bn_eps = global_params.batch_norm_epsilon
self.has_se = (self._block_args.se_ratio is not None) and (0 < self._block_args.se_ratio <= 1)
self.id_skip = block_args.id_skip # whether to use skip connection and drop connect
# Expansion phase (Inverted Bottleneck)
inp = self._block_args.input_filters # number of input channels
oup = self._block_args.input_filters * self._block_args.expand_ratio # number of output channels
if self._block_args.expand_ratio != 1:
Conv2d = get_same_padding_conv2d(image_size=image_size)
self._expand_conv = Conv2d(in_channels=inp, out_channels=oup, kernel_size=1, bias=False)
self._bn0 = nn.BatchNorm2d(num_features=oup, momentum=self._bn_mom, eps=self._bn_eps)
# image_size = calculate_output_image_size(image_size, 1) <-- this wouldn't modify image_size
# Depthwise convolution phase
k = self._block_args.kernel_size
s = self._block_args.stride
Conv2d = get_same_padding_conv2d(image_size=image_size)
self._depthwise_conv = Conv2d(
in_channels=oup, out_channels=oup, groups=oup, # groups makes it depthwise
kernel_size=k, stride=s, bias=False)
self._bn1 = nn.BatchNorm2d(num_features=oup, momentum=self._bn_mom, eps=self._bn_eps)
image_size = calculate_output_image_size(image_size, s)
# Squeeze and Excitation layer, if desired
if self.has_se:
Conv2d = get_same_padding_conv2d(image_size=(1, 1))
num_squeezed_channels = max(1, int(self._block_args.input_filters * self._block_args.se_ratio))
self._se_reduce = Conv2d(in_channels=oup, out_channels=num_squeezed_channels, kernel_size=1)
self._se_expand = Conv2d(in_channels=num_squeezed_channels, out_channels=oup, kernel_size=1)
# Pointwise convolution phase
final_oup = self._block_args.output_filters
Conv2d = get_same_padding_conv2d(image_size=image_size)
self._project_conv = Conv2d(in_channels=oup, out_channels=final_oup, kernel_size=1, bias=False)
self._bn2 = nn.BatchNorm2d(num_features=final_oup, momentum=self._bn_mom, eps=self._bn_eps)
self._swish = MemoryEfficientSwish()
def forward(self, inputs, drop_connect_rate=None):
"""MBConvBlock's forward function.
Args:
inputs (tensor): Input tensor.
drop_connect_rate (bool): Drop connect rate (float, between 0 and 1).
Returns:
Output of this block after processing.
"""
# Expansion and Depthwise Convolution
x = inputs
if self._block_args.expand_ratio != 1:
x = self._expand_conv(inputs)
x = self._bn0(x)
x = self._swish(x)
x = self._depthwise_conv(x)
x = self._bn1(x)
x = self._swish(x)
# Squeeze and Excitation
if self.has_se:
x_squeezed = F.adaptive_avg_pool2d(x, 1)
x_squeezed = self._se_reduce(x_squeezed)
x_squeezed = self._swish(x_squeezed)
x_squeezed = self._se_expand(x_squeezed)
x = torch.sigmoid(x_squeezed) * x
# Pointwise Convolution
x = self._project_conv(x)
x = self._bn2(x)
# Skip connection and drop connect
input_filters, output_filters = self._block_args.input_filters, self._block_args.output_filters
if self.id_skip and self._block_args.stride == 1 and input_filters == output_filters:
# The combination of skip connection and drop connect brings about stochastic depth.
if drop_connect_rate:
x = drop_connect(x, p=drop_connect_rate, training=self.training)
x = x + inputs # skip connection
return x
def set_swish(self, memory_efficient=True):
"""Sets swish function as memory efficient (for training) or standard (for export).
Args:
memory_efficient (bool): Whether to use memory-efficient version of swish.
"""
self._swish = MemoryEfficientSwish() if memory_efficient else Swish()
class EfficientNet(nn.Module):
def __init__(self, blocks_args=None, global_params=None):
super().__init__()
assert isinstance(blocks_args, list), 'blocks_args should be a list'
assert len(blocks_args) > 0, 'block args must be greater than 0'
self._global_params = global_params
self._blocks_args = blocks_args
# Batch norm parameters
bn_mom = 1 - self._global_params.batch_norm_momentum
bn_eps = self._global_params.batch_norm_epsilon
# Get stem static or dynamic convolution depending on image size
image_size = global_params.image_size
Conv2d = get_same_padding_conv2d(image_size=image_size)
# Stem
in_channels = 3 # rgb
out_channels = round_filters(32, self._global_params) # number of output channels
self._conv_stem = Conv2d(in_channels, out_channels, kernel_size=3, stride=2, bias=False)
self._bn0 = nn.BatchNorm2d(num_features=out_channels, momentum=bn_mom, eps=bn_eps)
image_size = calculate_output_image_size(image_size, 2)
# Build blocks
self._blocks = nn.ModuleList([])
for block_args in self._blocks_args:
# Update block input and output filters based on depth multiplier.
block_args = block_args._replace(
input_filters=round_filters(block_args.input_filters, self._global_params),
output_filters=round_filters(block_args.output_filters, self._global_params),
num_repeat=round_repeats(block_args.num_repeat, self._global_params)
)
# The first block needs to take care of stride and filter size increase.
self._blocks.append(MBConvBlock(block_args, self._global_params, image_size=image_size))
image_size = calculate_output_image_size(image_size, block_args.stride)
if block_args.num_repeat > 1: # modify block_args to keep same output size
block_args = block_args._replace(input_filters=block_args.output_filters, stride=1)
for _ in range(block_args.num_repeat - 1):
self._blocks.append(MBConvBlock(block_args, self._global_params, image_size=image_size))
# image_size = calculate_output_image_size(image_size, block_args.stride) # stride = 1
# Head
in_channels = block_args.output_filters # output of final block
out_channels = round_filters(1280, self._global_params)
Conv2d = get_same_padding_conv2d(image_size=image_size)
self._conv_head = Conv2d(in_channels, out_channels, kernel_size=1, bias=False)
self._bn1 = nn.BatchNorm2d(num_features=out_channels, momentum=bn_mom, eps=bn_eps)
# Final linear layer
self._avg_pooling = nn.AdaptiveAvgPool2d(1)
if self._global_params.include_top:
self._dropout = nn.Dropout(self._global_params.dropout_rate)
self._fc = nn.Linear(out_channels, self._global_params.num_classes)
# set activation to memory efficient swish by default
self._swish = MemoryEfficientSwish()
self.width_list = [i.size(1) for i in self.forward(torch.randn(1, 3, 640, 640))]
def set_swish(self, memory_efficient=True):
"""Sets swish function as memory efficient (for training) or standard (for export).
Args:
memory_efficient (bool): Whether to use memory-efficient version of swish.
"""
self._swish = MemoryEfficientSwish() if memory_efficient else Swish()
for block in self._blocks:
block.set_swish(memory_efficient)
def extract_endpoints(self, inputs):
# """Use convolution layer to extract features
# from reduction levels i in [1, 2, 3, 4, 5].
#
# Args:
# inputs (tensor): Input tensor.
#
# Returns:
# Dictionary of last intermediate features
# with reduction levels i in [1, 2, 3, 4, 5].
# Example:
# >>> import torch
# >>> from efficientnet.model import EfficientNet
# >>> inputs = torch.rand(1, 3, 224, 224)
# >>> model = EfficientNet.from_pretrained('efficientnet-b0')
# >>> endpoints = model.extract_endpoints(inputs)
# >>> print(endpoints['reduction_1'].shape) # torch.Size([1, 16, 112, 112])
# >>> print(endpoints['reduction_2'].shape) # torch.Size([1, 24, 56, 56])
# >>> print(endpoints['reduction_3'].shape) # torch.Size([1, 40, 28, 28])
# >>> print(endpoints['reduction_4'].shape) # torch.Size([1, 112, 14, 14])
# >>> print(endpoints['reduction_5'].shape) # torch.Size([1, 320, 7, 7])
# >>> print(endpoints['reduction_6'].shape) # torch.Size([1, 1280, 7, 7])
# """
endpoints = dict()
# Stem
x = self._swish(self._bn0(self._conv_stem(inputs)))
prev_x = x
# Blocks
for idx, block in enumerate(self._blocks):
drop_connect_rate = self._global_params.drop_connect_rate
if drop_connect_rate:
drop_connect_rate *= float(idx) / len(self._blocks) # scale drop connect_rate
x = block(x, drop_connect_rate=drop_connect_rate)
if prev_x.size(2) > x.size(2):
endpoints['reduction_{}'.format(len(endpoints) + 1)] = prev_x
elif idx == len(self._blocks) - 1:
endpoints['reduction_{}'.format(len(endpoints) + 1)] = x
prev_x = x
# Head
x = self._swish(self._bn1(self._conv_head(x)))
endpoints['reduction_{}'.format(len(endpoints) + 1)] = x
return endpoints
def forward(self, inputs):
"""use convolution layer to extract feature .
Args:
inputs (tensor): Input tensor.
Returns:
Output of the final convolution
layer in the efficientnet model.
"""
# Stem
x = self._swish(self._bn0(self._conv_stem(inputs)))
unique_tensors = {}
# Blocks
for idx, block in enumerate(self._blocks):
drop_connect_rate = self._global_params.drop_connect_rate
if drop_connect_rate:
drop_connect_rate *= float(idx) / len(self._blocks) # scale drop connect_rate
x = block(x, drop_connect_rate=drop_connect_rate)
width, height = x.shape[2], x.shape[3]
unique_tensors[(width, height)] = x
result_list = list(unique_tensors.values())[-4:]
# Head
return result_list
@classmethod
def from_name(cls, model_name, in_channels=3, **override_params):
"""Create an efficientnet model according to name.
Args:
model_name (str): Name for efficientnet.
in_channels (int): Input data's channel number.
override_params (other key word params):
Params to override model's global_params.
Optional key:
'width_coefficient', 'depth_coefficient',
'image_size', 'dropout_rate',
'num_classes', 'batch_norm_momentum',
'batch_norm_epsilon', 'drop_connect_rate',
'depth_divisor', 'min_depth'
Returns:
An efficientnet model.
"""
cls._check_model_name_is_valid(model_name)
blocks_args, global_params = get_model_params(model_name, override_params)
model = cls(blocks_args, global_params)
model._change_in_channels(in_channels)
return model
@classmethod
def from_pretrained(cls, model_name, weights_path=None, advprop=False,
in_channels=3, num_classes=1000, **override_params):
"""Create an efficientnet model according to name.
Args:
model_name (str): Name for efficientnet.
weights_path (None or str):
str: path to pretrained weights file on the local disk.
None: use pretrained weights downloaded from the Internet.
advprop (bool):
Whether to load pretrained weights
trained with advprop (valid when weights_path is None).
in_channels (int): Input data's channel number.
num_classes (int):
Number of categories for classification.
It controls the output size for final linear layer.
override_params (other key word params):
Params to override model's global_params.
Optional key:
'width_coefficient', 'depth_coefficient',
'image_size', 'dropout_rate',
'batch_norm_momentum',
'batch_norm_epsilon', 'drop_connect_rate',
'depth_divisor', 'min_depth'
Returns:
A pretrained efficientnet model.
"""
model = cls.from_name(model_name, num_classes=num_classes, **override_params)
load_pretrained_weights(model, model_name, weights_path=weights_path,
load_fc=(num_classes == 1000), advprop=advprop)
model._change_in_channels(in_channels)
return model
@classmethod
def get_image_size(cls, model_name):
"""Get the input image size for a given efficientnet model.
Args:
model_name (str): Name for efficientnet.
Returns:
Input image size (resolution).
"""
cls._check_model_name_is_valid(model_name)
_, _, res, _ = efficientnet_params(model_name)
return res
@classmethod
def _check_model_name_is_valid(cls, model_name):
"""Validates model name.
Args:
model_name (str): Name for efficientnet.
Returns:
bool: Is a valid name or not.
"""
if model_name not in VALID_MODELS:
raise ValueError('model_name should be one of: ' + ', '.join(VALID_MODELS))
def _change_in_channels(self, in_channels):
"""Adjust model's first convolution layer to in_channels, if in_channels not equals 3.
Args:
in_channels (int): Input data's channel number.
"""
if in_channels != 3:
Conv2d = get_same_padding_conv2d(image_size=self._global_params.image_size)
out_channels = round_filters(32, self._global_params)
self._conv_stem = Conv2d(in_channels, out_channels, kernel_size=3, stride=2, bias=False)
def efficient(model_name='efficientnet-b0', pretrained=False):
if pretrained:
model = EfficientNet.from_pretrained('{}'.format(model_name))
else:
model = EfficientNet.from_name('{}'.format(model_name))
return model
if __name__ == "__main__":
# VALID_MODELS = (
# 'efficientnet-b0', 'efficientnet-b1', 'efficientnet-b2', 'efficientnet-b3',
# 'efficientnet-b4', 'efficientnet-b5', 'efficientnet-b6', 'efficientnet-b7',
# 'efficientnet-b8',
# # Support the construction of 'efficientnet-l2' without pretrained weights
# 'efficientnet-l2'
# )
# Generating Sample image
image_size = (1, 3, 640, 640)
image = torch.rand(*image_size)
# Model
model = efficient('efficientnet-b0')
out = model(image)
print(len(out))四、手把手教你添加EfficientNetV1机制
下面教大家如何修改该网络结构,主干网络结构的修改步骤比较复杂,我也会将task.py文件上传到CSDN的文件中,大家如果自己修改不正确,可以尝试用我的task.py文件替换你的,然后只需要修改其中的第1、2、3、5步即可。
⭐修改过程中大家一定要仔细⭐
4.1 修改一
首先我门中到如下“ultralytics/nn”的目录,我们在这个目录下在创建一个新的目录,名字为'Addmodules'(此文件之后就用于存放我们的所有改进机制),之后我们在创建的目录内创建一个新的py文件复制粘贴进去 ,可以根据文章改进机制来起,这里大家根据自己的习惯命名即可。
4.2 修改二
第二步我们在我们创建的目录内创建一个新的py文件名字为'__init__.py'(只需要创建一个即可),然后在其内部导入我们本文的改进机制即可,其余代码均为未发大家没有不用理会!。

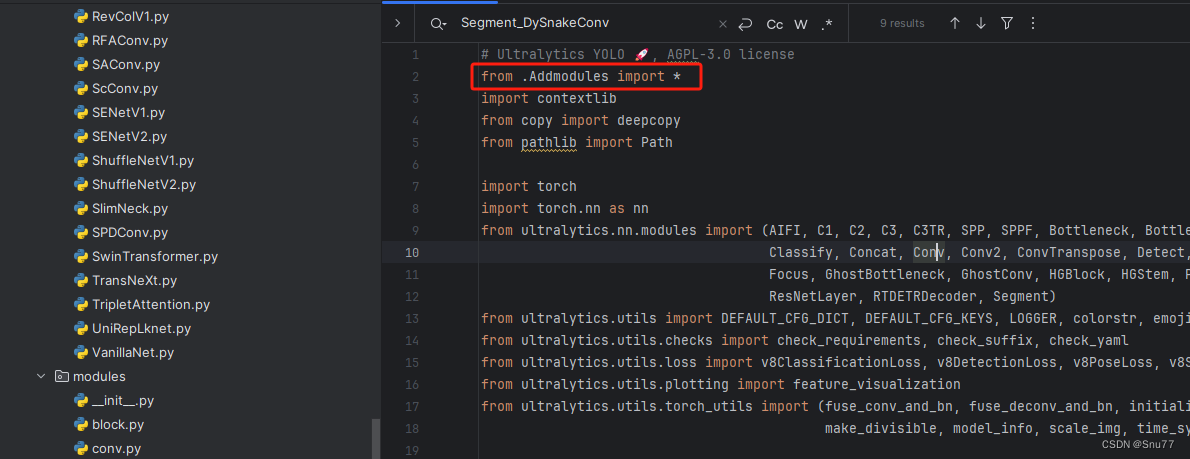
4.3 修改三
第三步我门中到如下文件'ultralytics/nn/tasks.py'然后在开头导入我们的所有改进机制(如果你用了我多个改进机制,这一步只需要修改一次即可)。
4.4 修改四
添加如下两行代码!!!

4.5 修改五
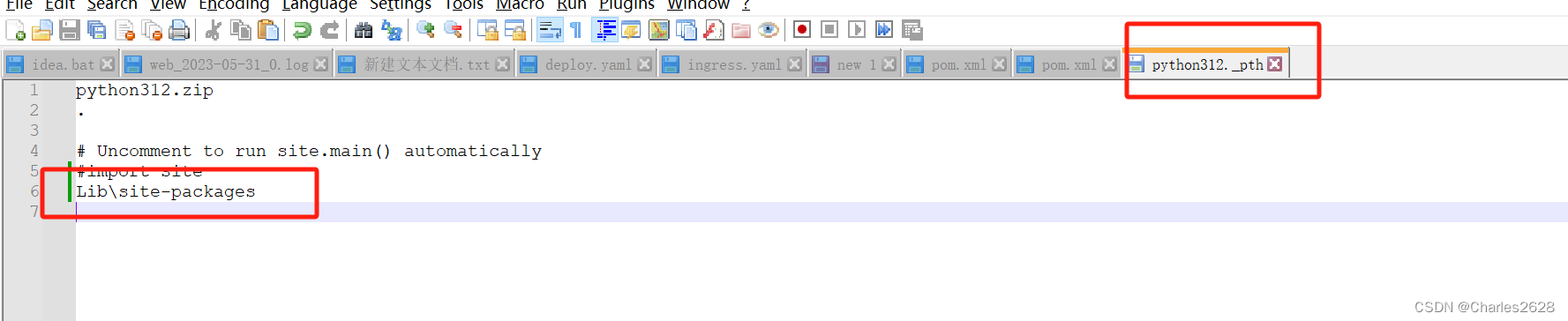
找到七百多行大概把具体看图片,按照图片来修改就行,添加红框内的部分,注意没有()只是函数名(此处我的文件里已经添加很多了后期都会发出来,大家没有的不用理会即可)。
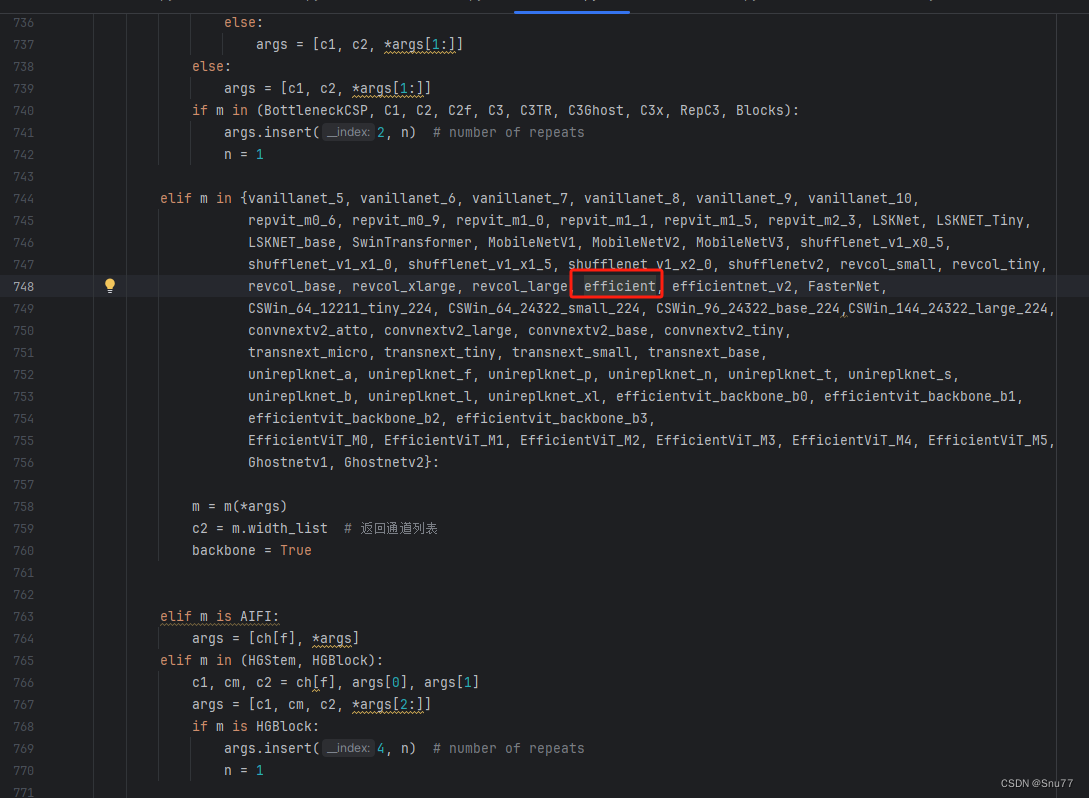
elif m in {自行添加对应的模型即可,下面都是一样的}:
m = m(*args)
c2 = m.width_list # 返回通道列表
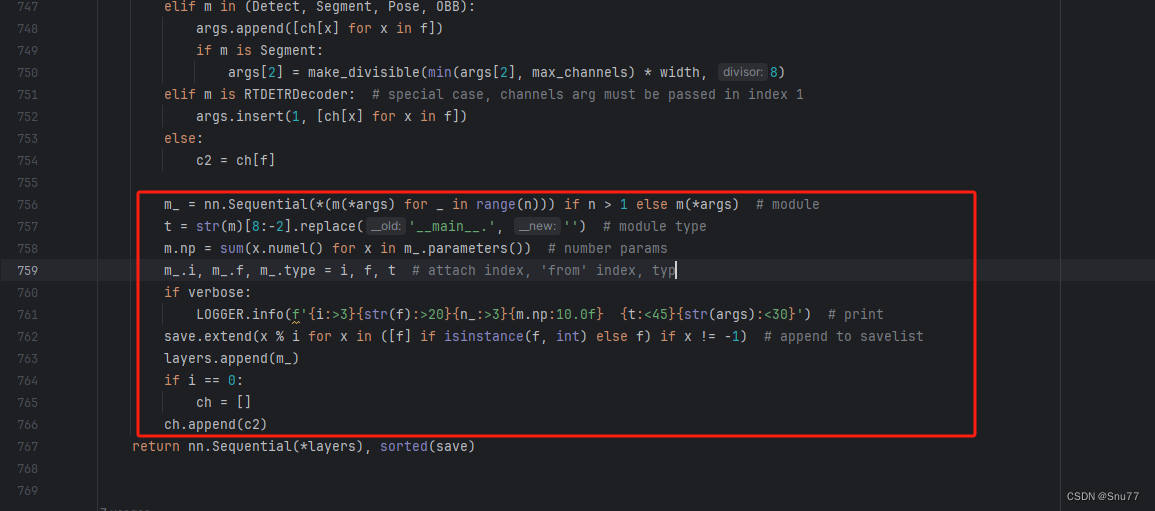
backbone = True4.6 修改六
用下面的代码替换红框内的内容。
if isinstance(c2, list):
m_ = m
m_.backbone = True
else:
m_ = nn.Sequential(*(m(*args) for _ in range(n))) if n > 1 else m(*args) # module
t = str(m)[8:-2].replace('__main__.', '') # module type
m.np = sum(x.numel() for x in m_.parameters()) # number params
m_.i, m_.f, m_.type = i + 4 if backbone else i, f, t # attach index, 'from' index, type
if verbose:
LOGGER.info(f'{i:>3}{str(f):>20}{n_:>3}{m.np:10.0f} {t:<45}{str(args):<30}') # print
save.extend(
x % (i + 4 if backbone else i) for x in ([f] if isinstance(f, int) else f) if x != -1) # append to savelist
layers.append(m_)
if i == 0:
ch = []
if isinstance(c2, list):
ch.extend(c2)
if len(c2) != 5:
ch.insert(0, 0)
else:
ch.append(c2)4.7 修改七
修改七这里非常要注意,不是文件开头YOLOv8的那predict,是400+行的RTDETR的predict!!!初始模型如下,用我给的代码替换即可!!!

代码如下->
def predict(self, x, profile=False, visualize=False, batch=None, augment=False, embed=None):
"""
Perform a forward pass through the model.
Args:
x (torch.Tensor): The input tensor.
profile (bool, optional): If True, profile the computation time for each layer. Defaults to False.
visualize (bool, optional): If True, save feature maps for visualization. Defaults to False.
batch (dict, optional): Ground truth data for evaluation. Defaults to None.
augment (bool, optional): If True, perform data augmentation during inference. Defaults to False.
embed (list, optional): A list of feature vectors/embeddings to return.
Returns:
(torch.Tensor): Model's output tensor.
"""
y, dt, embeddings = [], [], [] # outputs
for m in self.model[:-1]: # except the head part
if m.f != -1: # if not from previous layer
x = y[m.f] if isinstance(m.f, int) else [x if j == -1 else y[j] for j in m.f] # from earlier layers
if profile:
self._profile_one_layer(m, x, dt)
if hasattr(m, 'backbone'):
x = m(x)
if len(x) != 5: # 0 - 5
x.insert(0, None)
for index, i in enumerate(x):
if index in self.save:
y.append(i)
else:
y.append(None)
x = x[-1] # 最后一个输出传给下一层
else:
x = m(x) # run
y.append(x if m.i in self.save else None) # save output
if visualize:
feature_visualization(x, m.type, m.i, save_dir=visualize)
if embed and m.i in embed:
embeddings.append(nn.functional.adaptive_avg_pool2d(x, (1, 1)).squeeze(-1).squeeze(-1)) # flatten
if m.i == max(embed):
return torch.unbind(torch.cat(embeddings, 1), dim=0)
head = self.model[-1]
x = head([y[j] for j in head.f], batch) # head inference
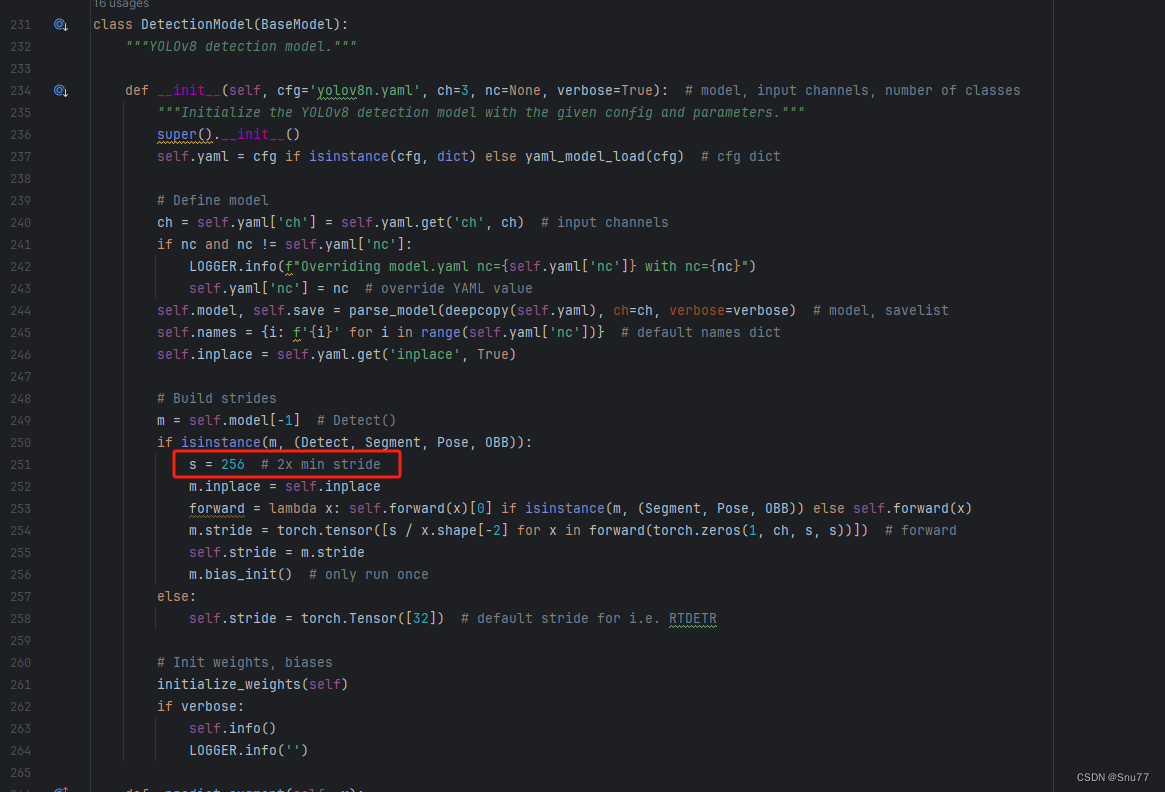
return x4.8 修改八
我们将下面的s用640替换即可,这一步也是部分的主干可以不修改,但有的不修改就会报错,所以我们还是修改一下。
4.9 RT-DETR不能打印计算量问题的解决
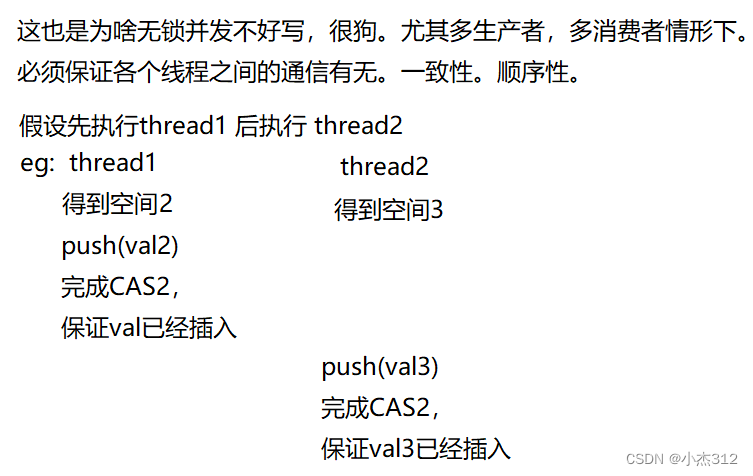
计算的GFLOPs计算异常不打印,所以需要额外修改一处, 我们找到如下文件'ultralytics/utils/torch_utils.py'文件内有如下的代码按照如下的图片进行修改,大家看好函数就行,其中红框的640可能和你的不一样, 然后用我给的代码替换掉整个代码即可。
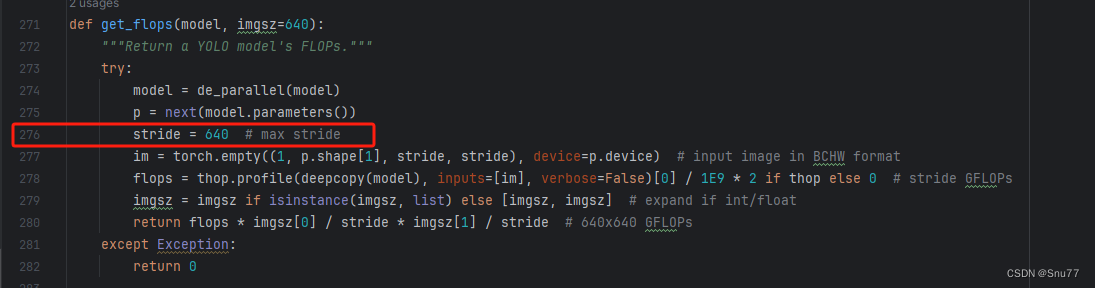
def get_flops(model, imgsz=640):
"""Return a YOLO model's FLOPs."""
try:
model = de_parallel(model)
p = next(model.parameters())
# stride = max(int(model.stride.max()), 32) if hasattr(model, 'stride') else 32 # max stride
stride = 640
im = torch.empty((1, 3, stride, stride), device=p.device) # input image in BCHW format
flops = thop.profile(deepcopy(model), inputs=[im], verbose=False)[0] / 1E9 * 2 if thop else 0 # stride GFLOPs
imgsz = imgsz if isinstance(imgsz, list) else [imgsz, imgsz] # expand if int/float
return flops * imgsz[0] / stride * imgsz[1] / stride # 640x640 GFLOPs
except Exception:
return 0
4.10 可选修改
有些读者的数据集部分图片比较特殊,在验证的时候会导致形状不匹配的报错,如果大家在验证的时候报错形状不匹配的错误可以固定验证集的图片尺寸,方法如下 ->
找到下面这个文件ultralytics/models/yolo/detect/train.py然后其中有一个类是DetectionTrainer class中的build_dataset函数中的一个参数rect=mode == 'val'改为rect=False

五、EfficientNetV1的yaml文件
5.1 yaml文件
大家复制下面的yaml文件,然后通过我给大家的运行代码运行即可,RT-DETR的调参部分需要后面的文章给大家讲,现在目前免费给大家看这一部分不开放。
# Ultralytics YOLO 🚀, AGPL-3.0 license
# RT-DETR-l object detection model with P3-P5 outputs. For details see https://docs.ultralytics.com/models/rtdetr
# Parameters
nc: 80 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov8n-cls.yaml' will call yolov8-cls.yaml with scale 'n'
# [depth, width, max_channels]
l: [1.00, 1.00, 1024]
backbone:
# [from, repeats, module, args]
- [-1, 1, efficient, []] # 4
head:
- [-1, 1, Conv, [256, 1, 1, None, 1, 1, False]] # 5 input_proj.2
- [-1, 1, AIFI, [1024, 8]] # 6
- [-1, 1, Conv, [256, 1, 1]] # 7, Y5, lateral_convs.0
- [-1, 1, nn.Upsample, [None, 2, 'nearest']] # 8
- [3, 1, Conv, [256, 1, 1, None, 1, 1, False]] # 9 input_proj.1
- [[-2, -1], 1, Concat, [1]] # 10
- [-1, 3, RepC3, [256, 0.5]] # 11, fpn_blocks.0
- [-1, 1, Conv, [256, 1, 1]] # 12, Y4, lateral_convs.1
- [-1, 1, nn.Upsample, [None, 2, 'nearest']] # 13
- [2, 1, Conv, [256, 1, 1, None, 1, 1, False]] # 14 input_proj.0
- [[-2, -1], 1, Concat, [1]] # 15 cat backbone P4
- [-1, 3, RepC3, [256, 0.5]] # X3 (16), fpn_blocks.1
- [-1, 1, Conv, [256, 3, 2]] # 17, downsample_convs.0
- [[-1, 12], 1, Concat, [1]] # 18 cat Y4
- [-1, 3, RepC3, [256, 0.5]] # F4 (19), pan_blocks.0
- [-1, 1, Conv, [256, 3, 2]] # 20, downsample_convs.1
- [[-1, 7], 1, Concat, [1]] # 21 cat Y5
- [-1, 3, RepC3, [256, 0.5]] # F5 (22), pan_blocks.1
- [[16, 19, 22], 1, RTDETRDecoder, [nc, 256, 300, 4, 8, 3]] # Detect(P3, P4, P5)
5.2 运行文件
大家可以创建一个train.py文件将下面的代码粘贴进去然后替换你的文件运行即可开始训练。
import warnings
from ultralytics import RTDETR
warnings.filterwarnings('ignore')
if __name__ == '__main__':
model = RTDETR('替换你想要运行的yaml文件')
# model.load('') # 可以加载你的版本预训练权重
model.train(data=r'替换你的数据集地址即可',
cache=False,
imgsz=640,
epochs=72,
batch=4,
workers=0,
device='0',
project='runs/RT-DETR-train',
name='exp',
# amp=True
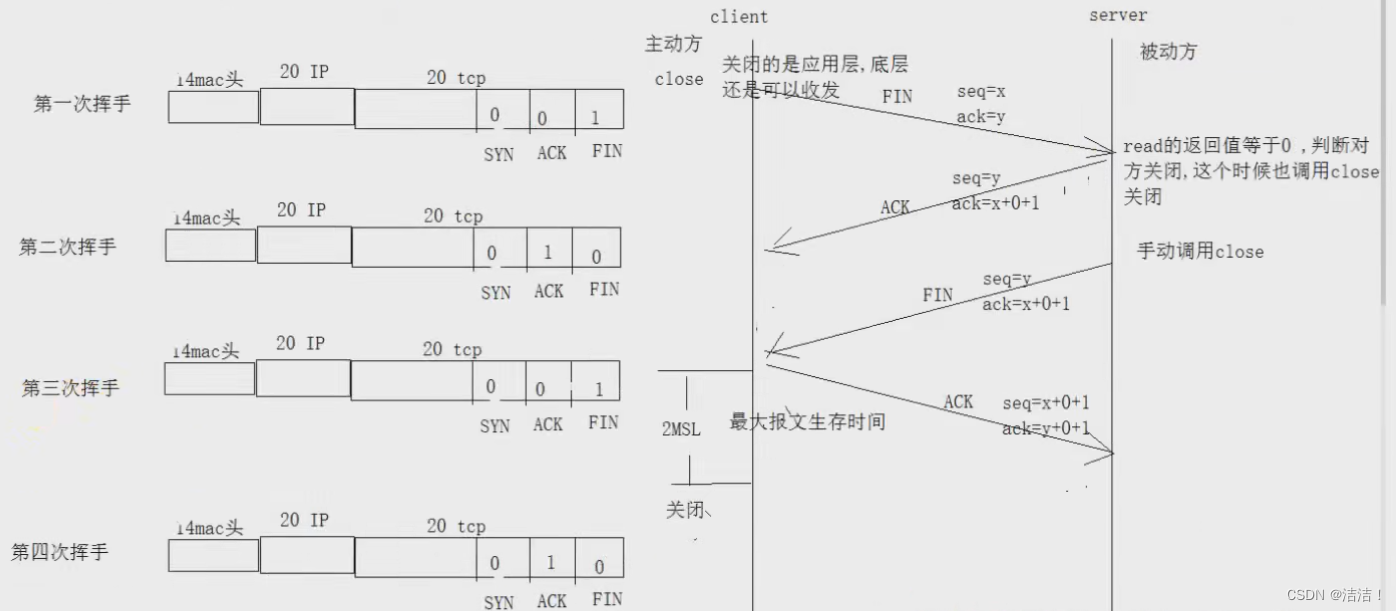
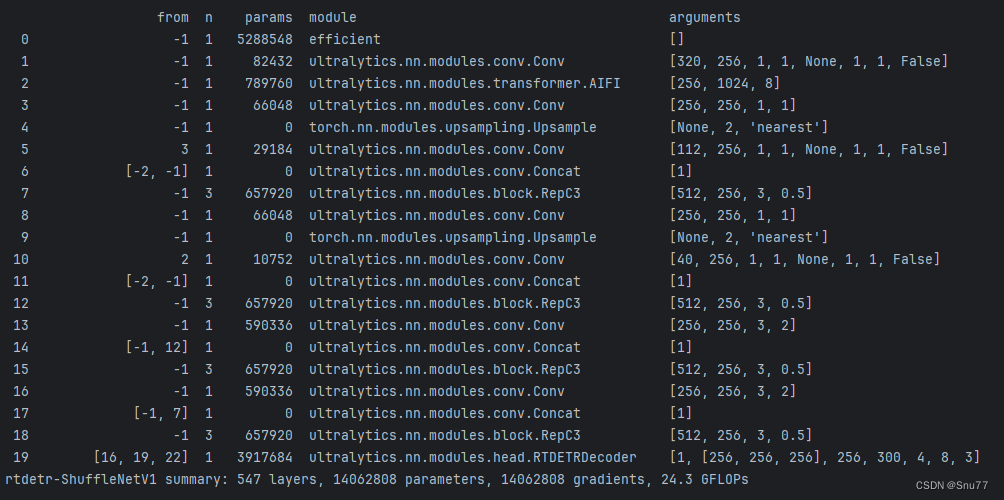
)5.3 成功训练截图
下面是成功运行的截图(确保我的改进机制是可用的),已经完成了有1个epochs的训练,图片太大截不全第2个epochs了。
六、全文总结
从今天开始正式开始更新RT-DETR剑指论文专栏,本专栏的内容会迅速铺开,在短期呢大量更新,价格也会乘阶梯性上涨,所以想要和我一起学习RT-DETR改进,可以在前期直接关注,本文专栏旨在打造全网最好的RT-DETR专栏为想要发论文的家进行服务。
专栏链接:RT-DETR剑指论文专栏,持续复现各种顶会内容——论文收割机RT-DETR



![[小程序]API、数据与事件](https://img-blog.csdnimg.cn/direct/d4b60f2fa98e47baaef0d5ef1ab1a675.png)