本文主要探讨210触摸屏驱动相关知识。
I2C子系统
i2c子系统组成部分:I2C核心,I2C总线驱动,I2C设备驱动
I2C核心:I2C总线驱动和设备驱动注册注销方法
I2C总线驱动:I2C适配器(I2C控制器)控制,用于I2C读写时序(I2C_adapter、i2c_algorithm)
I2C设备驱动:I2C适配器与CPU交换数据(i2c_driver、i2c_client)


结构体
struct i2c_adapter {
struct module *owner;
unsigned int id;
unsigned int class; /* classes to allow probing for */
const struct i2c_algorithm *algo; /* the algorithm to access the bus */
void *algo_data;
/* data fields that are valid for all devices */
struct rt_mutex bus_lock;
int timeout; /* in jiffies */
int retries;
struct device dev; /* the adapter device */
int nr;
char name[48];
struct completion dev_released;
struct list_head userspace_clients;
}; int nr;;i2c适配器id号
unsigned int class;i2c适配器适配器类(/sys/class/i2c-adapter)
const struct i2c_algorithm *algo;void *algo_data;i2c适配器通信方法
struct device dev;i2c适配器设备
char name[48];i2c适配器名称
struct list_head userspace_clients;挂接与适配器匹配成功的从设备i2c_client的链表头
用于i2c适配器描述(I2C控制器)
struct i2c_algorithm {
int (*master_xfer)(struct i2c_adapter *adap, struct i2c_msg *msgs,
int num);
int (*smbus_xfer) (struct i2c_adapter *adap, u16 addr,
unsigned short flags, char read_write,
u8 command, int size, union i2c_smbus_data *data);
/* To determine what the adapter supports */
u32 (*functionality) (struct i2c_adapter *);
}; master_xfer:I2C传输时序,传输i2c_msg
master_xfer_atomic:同上,用于访问电源管理芯片
smbus_xfer:实现SMBus传输
smbus_xfer_atomic:用来访问电源管理芯片
functionality:返回flags(I2C_FUNC_*)
用于i2c通信方法描述
struct i2c_client {
unsigned short flags; /* div., see below */
unsigned short addr; /* chip address - NOTE: 7bit */
/* addresses are stored in the */
/* _LOWER_ 7 bits */
char name[I2C_NAME_SIZE];
struct i2c_adapter *adapter; /* the adapter we sit on */
struct i2c_driver *driver; /* and our access routines */
struct device dev; /* the device structure */
int irq; /* irq issued by device */
struct list_head detected;
}; unsigned short flags;i2c设备特性标志位
unsigned short addr;i2c设备地址
char name[I2C_NAME_SIZE];i2c设备名
struct i2c_adapter *adapter;与次设备匹配成功的适配器
struct i2c_driver *driver;与次设备匹配成功的设备驱动
struct device dev;i2c设备
int irq;次设备中断引脚
struct list_head detected;挂接到匹配成功的i2c_driver链表头上
用于i2c次设备描述
struct i2c_driver {
unsigned int class;
/* Notifies the driver that a new bus has appeared or is about to be
* removed. You should avoid using this if you can, it will probably
* be removed in a near future.
*/
int (*attach_adapter)(struct i2c_adapter *);
int (*detach_adapter)(struct i2c_adapter *);
/* Standard driver model interfaces */
int (*probe)(struct i2c_client *, const struct i2c_device_id *);
int (*remove)(struct i2c_client *);
/* driver model interfaces that don't relate to enumeration */
void (*shutdown)(struct i2c_client *);
int (*suspend)(struct i2c_client *, pm_message_t mesg);
int (*resume)(struct i2c_client *);
/* Alert callback, for example for the SMBus alert protocol.
* The format and meaning of the data value depends on the protocol.
* For the SMBus alert protocol, there is a single bit of data passed
* as the alert response's low bit ("event flag").
*/
void (*alert)(struct i2c_client *, unsigned int data);
/* a ioctl like command that can be used to perform specific functions
* with the device.
*/
int (*command)(struct i2c_client *client, unsigned int cmd, void *arg);
struct device_driver driver;
const struct i2c_device_id *id_table;
/* Device detection callback for automatic device creation */
int (*detect)(struct i2c_client *, struct i2c_board_info *);
const unsigned short *address_list;
struct list_head clients;
}; unsigned int class;i2c设备驱动所支持的i2c设备的类型
int (*attach_adapter)(struct i2c_adapter *);匹配适配器
int (*probe)(struct i2c_client *, const struct i2c_device_id *); 设备驱动层probe函数
int (*remove)(struct i2c_client *);设备驱动卸载函数
const struct i2c_device_id *id_table;设备驱动的id_table(匹配驱动)
const unsigned short *address_list;驱动支持设备的地址数组
struct list_head clients;挂接与i2c_driver匹配成功的i2c_client(设备)
用于描述设备驱动
struct i2c_board_info {
char type[I2C_NAME_SIZE];
unsigned short flags;
unsigned short addr;
void *platform_data;
struct dev_archdata *archdata;
#ifdef CONFIG_OF
struct device_node *of_node;
#endif
int irq;
}; char type[I2C_NAME_SIZE];i2c设备名字(i2c_client.name)
unsigned short flags;i2c_client.flags
unsigned short addr;i2c_client.addr
void *platform_data;i2c_client.dev.platform_data
struct dev_archdata *archdata;i2c_client.dev.archdata
int irq;i2c_client.irq
描述设备信息结构体
struct i2c_msg {
__u16 addr; /*次设备地址 */
__u16 flags; /* 标志位*/
#define I2C_M_TEN 0x0010 /* 设置设备地址是10bit */
#define I2C_M_RD 0x0001 /* 设置i2c控制器为接收方,否则为发送方 */
#define I2C_M_NOSTART 0x4000
#define I2C_M_REV_DIR_ADDR 0x2000 /* 设置将读写标志位反转 */
#define I2C_M_IGNORE_NAK 0x1000 /* 设置i2c_msg忽略I2C器件的ack和nack信号 */
#define I2C_M_NO_RD_ACK 0x0800 /* 设置读操作中主机不用ACK */
#define I2C_M_RECV_LEN 0x0400
__u16 len; /* 数据长度 */
__u8 *buf; /* 数据缓冲区指针 */
};i2c CORE
postcore_initcall(i2c_init);
module_exit(i2c_exit);static int __init i2c_init(void)
{
int retval;
retval = bus_register(&i2c_bus_type);
if (retval)
return retval;
#ifdef CONFIG_I2C_COMPAT
i2c_adapter_compat_class = class_compat_register("i2c-adapter");
if (!i2c_adapter_compat_class) {
retval = -ENOMEM;
goto bus_err;
}
#endif
retval = i2c_add_driver(&dummy_driver);
if (retval)
goto class_err;
return 0;
class_err:
#ifdef CONFIG_I2C_COMPAT
class_compat_unregister(i2c_adapter_compat_class);
bus_err:
#endif
bus_unregister(&i2c_bus_type);
return retval;
}struct bus_type i2c_bus_type = {
.name = "i2c",
.match = i2c_device_match,
.probe = i2c_device_probe,
.remove = i2c_device_remove,
.shutdown = i2c_device_shutdown,
.pm = &i2c_device_pm_ops,
};static int i2c_device_match(struct device *dev, struct device_driver *drv)
{
struct i2c_client *client = i2c_verify_client(dev);
struct i2c_driver *driver;
if (!client)
return 0;
driver = to_i2c_driver(drv);
/* match on an id table if there is one */
if (driver->id_table)
return i2c_match_id(driver->id_table, client) != NULL;
return 0;
}
static int i2c_device_probe(struct device *dev)
{
struct i2c_client *client = i2c_verify_client(dev);
struct i2c_driver *driver;
int status;
if (!client)
return 0;
driver = to_i2c_driver(dev->driver);
if (!driver->probe || !driver->id_table)
return -ENODEV;
client->driver = driver;
if (!device_can_wakeup(&client->dev))
device_init_wakeup(&client->dev,
client->flags & I2C_CLIENT_WAKE);
dev_dbg(dev, "probe\n");
status = driver->probe(client, i2c_match_id(driver->id_table, client));
if (status) {
client->driver = NULL;
i2c_set_clientdata(client, NULL);
}
return status;
}i2c_match_id通过设备与设备驱动名字和i2c_device_id依次匹配,总线层的probe为设备client层的probe
注册接口
int i2c_add_adapter(struct i2c_adapter *adapter);
int i2c_add_numbered_adapter(struct i2c_adapter *adap);
注册adapter,都调用i2c_register_adapter,i2c_add_adapter自动分配适配器编号,i2c_add_numbered_adapter指定编号
static inline int i2c_add_driver(struct i2c_driver *driver);注册driver
struct i2c_client *i2c_new_device(struct i2c_adapter *adap, struct i2c_board_info const *info);注册clientstatic int i2c_register_adapter(struct i2c_adapter *adap)
{
int res = 0, dummy;
/* Can't register until after driver model init */
if (unlikely(WARN_ON(!i2c_bus_type.p))) {
res = -EAGAIN;
goto out_list;
}
rt_mutex_init(&adap->bus_lock);
INIT_LIST_HEAD(&adap->userspace_clients);
/* Set default timeout to 1 second if not already set */
if (adap->timeout == 0)
adap->timeout = HZ;
dev_set_name(&adap->dev, "i2c-%d", adap->nr);
adap->dev.bus = &i2c_bus_type;
adap->dev.type = &i2c_adapter_type;
res = device_register(&adap->dev);
if (res)
goto out_list;
dev_dbg(&adap->dev, "adapter [%s] registered\n", adap->name);
#ifdef CONFIG_I2C_COMPAT
res = class_compat_create_link(i2c_adapter_compat_class, &adap->dev,
adap->dev.parent);
if (res)
dev_warn(&adap->dev,
"Failed to create compatibility class link\n");
#endif
/* create pre-declared device nodes */
if (adap->nr < __i2c_first_dynamic_bus_num)
i2c_scan_static_board_info(adap);
/* Notify drivers */
mutex_lock(&core_lock);
dummy = bus_for_each_drv(&i2c_bus_type, NULL, adap,
__process_new_adapter);
mutex_unlock(&core_lock);
return 0;
out_list:
mutex_lock(&core_lock);
idr_remove(&i2c_adapter_idr, adap->nr);
mutex_unlock(&core_lock);
return res;
}static void i2c_scan_static_board_info(struct i2c_adapter *adapter)
{
struct i2c_devinfo *devinfo;
down_read(&__i2c_board_lock);
list_for_each_entry(devinfo, &__i2c_board_list, list) {
if (devinfo->busnum == adapter->nr
&& !i2c_new_device(adapter,
&devinfo->board_info))
dev_err(&adapter->dev,
"Can't create device at 0x%02x\n",
devinfo->board_info.addr);
}
up_read(&__i2c_board_lock);
}int i2c_register_driver(struct module *owner, struct i2c_driver *driver)
{
int res;
/* Can't register until after driver model init */
if (unlikely(WARN_ON(!i2c_bus_type.p)))
return -EAGAIN;
/* add the driver to the list of i2c drivers in the driver core */
driver->driver.owner = owner;
driver->driver.bus = &i2c_bus_type;
/* When registration returns, the driver core
* will have called probe() for all matching-but-unbound devices.
*/
res = driver_register(&driver->driver);
if (res)
return res;
pr_debug("i2c-core: driver [%s] registered\n", driver->driver.name);
INIT_LIST_HEAD(&driver->clients);
/* Walk the adapters that are already present */
mutex_lock(&core_lock);
bus_for_each_dev(&i2c_bus_type, NULL, driver, __process_new_driver);
mutex_unlock(&core_lock);
return 0;
} i2c_scan_static_board_info(adap);用于注册设备
遍历 __i2c_board_list上的i2c_devinfo结构体,比较i2c_devinfo->busnum与适配的编号,匹配则调用i2c_new_device注册
i2c_new_device是在系统启动时在smdkc110_machine_init注册i2c次设备
smdkc110_machine_init-->platform_add_devices-->s3c_i2c1_set_platdata-->i2c_register_board_info
i2c driver
subsys_initcall(i2c_adap_s3c_init);static int __init i2c_adap_s3c_init(void)
{
return platform_driver_register(&s3c24xx_i2c_driver);
}
MODULE_DEVICE_TABLE(platform, s3c24xx_driver_ids);
static struct platform_driver s3c24xx_i2c_driver = {
.probe = s3c24xx_i2c_probe,
.remove = s3c24xx_i2c_remove,
.id_table = s3c24xx_driver_ids,
.driver = {
.owner = THIS_MODULE,
.name = "s3c-i2c",
.pm = S3C24XX_DEV_PM_OPS,
},
};static int s3c24xx_i2c_probe(struct platform_device *pdev)
{
struct s3c24xx_i2c *i2c; // 次结构体是三星对本SoC中的i2c控制器的一个描述,是一个用来在多文件中进行数据传递的全局结构体
struct s3c2410_platform_i2c *pdata; // 此结构体用来表示平台设备的私有数据
struct resource *res;
int ret;
pdata = pdev->dev.platform_data; // 获取到平台设备层中的平台数据
if (!pdata) {
dev_err(&pdev->dev, "no platform data\n");
return -EINVAL;
}
i2c = kzalloc(sizeof(struct s3c24xx_i2c), GFP_KERNEL); // 给s3c24xx_i2c类型指针申请分配内存空间
if (!i2c) {
dev_err(&pdev->dev, "no memory for state\n");
return -ENOMEM;
}
// 以下主要是对s3c24xx_i2c 结构体中的i2c_adapter变量的一个填充
strlcpy(i2c->adap.name, "s3c2410-i2c", sizeof(i2c->adap.name)); // 设置适配器的名字 s3c2410-i2c
i2c->adap.owner = THIS_MODULE;
i2c->adap.algo = &s3c24xx_i2c_algorithm; // 通信算法
i2c->adap.retries = 2;
i2c->adap.class = I2C_CLASS_HWMON | I2C_CLASS_SPD; // 该适配器所支持的次设备类有哪些
i2c->tx_setup = 50;
spin_lock_init(&i2c->lock); // 初始化互斥锁
init_waitqueue_head(&i2c->wait); // 初始化工作队列
/* find the clock and enable it */
i2c->dev = &pdev->dev; // 通过s3c24xx_i2c->dev 指针指向平台设备的device结构体
i2c->clk = clk_get(&pdev->dev, "i2c");
if (IS_ERR(i2c->clk)) {
dev_err(&pdev->dev, "cannot get clock\n");
ret = -ENOENT;
goto err_noclk;
}
dev_dbg(&pdev->dev, "clock source %p\n", i2c->clk);
clk_enable(i2c->clk); // 使能时钟
/* map the registers */
res = platform_get_resource(pdev, IORESOURCE_MEM, 0); // 获取平台设备资源
if (res == NULL) {
dev_err(&pdev->dev, "cannot find IO resource\n");
ret = -ENOENT;
goto err_clk;
}
i2c->ioarea = request_mem_region(res->start, resource_size(res), // 物理地址到虚拟地址的映射请求
pdev->name);
if (i2c->ioarea == NULL) {
dev_err(&pdev->dev, "cannot request IO\n");
ret = -ENXIO;
goto err_clk;
}
i2c->regs = ioremap(res->start, resource_size(res)); // 地址映射
if (i2c->regs == NULL) {
dev_err(&pdev->dev, "cannot map IO\n");
ret = -ENXIO;
goto err_ioarea;
}
dev_dbg(&pdev->dev, "registers %p (%p, %p)\n",
i2c->regs, i2c->ioarea, res);
/* setup info block for the i2c core */
i2c->adap.algo_data = i2c; // 将s3c24xx_i2c 结构体变量作为s3c24xx_i2c中内置的i2c_adapter适配器中的私有数据
i2c->adap.dev.parent = &pdev->dev; // 指定适配器设备的父设备是平台设备device : /sys/devices/platform/s3c2410-i2cn这个目录下
/* initialise the i2c controller */
ret = s3c24xx_i2c_init(i2c); // i2c控制器(适配器) 寄存器相关的配置
if (ret != 0)
goto err_iomap;
/* find the IRQ for this unit (note, this relies on the init call to
* ensure no current IRQs pending
*/
i2c->irq = ret = platform_get_irq(pdev, 0); // 获取平台设备中的i2c中断号(这个中断是I2C控制器产生的中断)
if (ret <= 0) {
dev_err(&pdev->dev, "cannot find IRQ\n");
goto err_iomap;
}
ret = request_irq(i2c->irq, s3c24xx_i2c_irq, IRQF_DISABLED, // 申请中断
dev_name(&pdev->dev), i2c);
if (ret != 0) {
dev_err(&pdev->dev, "cannot claim IRQ %d\n", i2c->irq);
goto err_iomap;
}
ret = s3c24xx_i2c_register_cpufreq(i2c); // 这个不清楚
if (ret < 0) {
dev_err(&pdev->dev, "failed to register cpufreq notifier\n");
goto err_irq;
}
/* Note, previous versions of the driver used i2c_add_adapter()
* to add the bus at any number. We now pass the bus number via
* the platform data, so if unset it will now default to always
* being bus 0.
*/
i2c->adap.nr = pdata->bus_num; // 确定i2c主机(适配器)的编号
ret = i2c_add_numbered_adapter(&i2c->adap); // 向i2c核心注册i2c适配器 /sys/devices/platform/s3c2410-i2cn/s3c2410-i2c 因为在函数内会将 i2c-%d作为适配器的名字
if (ret < 0) {
dev_err(&pdev->dev, "failed to add bus to i2c core\n");
goto err_cpufreq;
}
platform_set_drvdata(pdev, i2c); // 将s3c24xx_i2c变量作为平台设备私有数据中的设备驱动私有数据 dev->p->driver_data
// 因为这个变量还会在本文件中其他函数中会用到了
clk_disable(i2c->clk);
dev_info(&pdev->dev, "%s: S3C I2C adapter\n", dev_name(&i2c->adap.dev));
return 0;
err_cpufreq:
s3c24xx_i2c_deregister_cpufreq(i2c);
err_irq:
free_irq(i2c->irq, i2c);
err_iomap:
iounmap(i2c->regs);
err_ioarea:
release_resource(i2c->ioarea);
kfree(i2c->ioarea);
err_clk:
clk_disable(i2c->clk);
clk_put(i2c->clk);
err_noclk:
kfree(i2c);
return ret;
}i2c client
210使用I2C电容触摸屏(gslx680)
module_init(gsl_ts_init);
module_exit(gsl_ts_exit);static int __init gsl_ts_init(void)
{
int ret;
print_info("==gsl_ts_init==\n");
ret = i2c_add_driver(&gsl_ts_driver);
print_info("ret=%d\n",ret);
return ret;
}static inline int i2c_add_driver(struct i2c_driver *driver)
{
return i2c_register_driver(THIS_MODULE, driver);
}MODULE_DEVICE_TABLE(i2c, gsl_ts_id);
static struct i2c_driver gsl_ts_driver = {
.driver = {
.name = GSLX680_I2C_NAME,
.owner = THIS_MODULE,
},
#ifndef CONFIG_HAS_EARLYSUSPEND
.suspend = gsl_ts_suspend,
.resume = gsl_ts_resume,
#endif
.probe = gsl_ts_probe,
.remove = __devexit_p(gsl_ts_remove),
.id_table = gsl_ts_id,
};#define GSLX680_I2C_NAME "gslX680"
#define GSLX680_I2C_ADDR 0x40
#define IRQ_PORT IRQ_EINT(7)
#define GSL_DATA_REG 0x80
#define GSL_STATUS_REG 0xe0
#define GSL_PAGE_REG 0xf0static int __devinit gsl_ts_probe(struct i2c_client *client,
const struct i2c_device_id *id)
{
struct gsl_ts *ts; // 设备驱动层封装的一个全局结构体
int rc;
print_info("GSLX680 Enter %s\n", __func__);
if (!i2c_check_functionality(client->adapter, I2C_FUNC_I2C)) {
dev_err(&client->dev, "I2C functionality not supported\n");
return -ENODEV;
}
ts = kzalloc(sizeof(*ts), GFP_KERNEL); // 给 gsl_ts类型的指针申请分配内存
if (!ts)
return -ENOMEM;
print_info("==kzalloc success=\n");
ts->client = client; // 通过gsl_ts->client指针去指向传进来的i2c次设备i2c_client
i2c_set_clientdata(client, ts); // 将gsl_ts作为i2c次设备的私有数据区中的设备驱动私有数据
ts->device_id = id->driver_data;
rc = gslX680_ts_init(client, ts); // 初始化操作
if (rc < 0) {
dev_err(&client->dev, "GSLX680 init failed\n");
goto error_mutex_destroy;
}
gsl_client = client; // 通过一个全局的i2c_client指针gsl_client去指向传进来的i2c次设备i2c_client
gslX680_init(); // gslX680 触摸屏相关的gpio初始化操作
init_chip(ts->client); // gslX680触摸屏芯片相关的初始化操作
check_mem_data(ts->client);
rc= request_irq(client->irq, gsl_ts_irq, IRQF_TRIGGER_RISING, client->name, ts); // 申请中断,这个中断是接在SoC的一个外部中断引脚上的
if (rc < 0) { // 当发生中断的时候表示有数据可以进行读取了,那么就会通知
print_info( "gsl_probe: request irq failed\n"); // I2C主机去去读数据
goto error_req_irq_fail;
}
/* create debug attribute */
//rc = device_create_file(&ts->input->dev, &dev_attr_debug_enable);
#ifdef CONFIG_HAS_EARLYSUSPEND
ts->early_suspend.level = EARLY_SUSPEND_LEVEL_BLANK_SCREEN + 1;
//ts->early_suspend.level = EARLY_SUSPEND_LEVEL_DISABLE_FB + 1;
ts->early_suspend.suspend = gsl_ts_early_suspend;
ts->early_suspend.resume = gsl_ts_late_resume;
register_early_suspend(&ts->early_suspend);
#endif
#ifdef GSL_MONITOR
print_info( "gsl_ts_probe () : queue gsl_monitor_workqueue\n");
INIT_DELAYED_WORK(&gsl_monitor_work, gsl_monitor_worker);
gsl_monitor_workqueue = create_singlethread_workqueue("gsl_monitor_workqueue");
queue_delayed_work(gsl_monitor_workqueue, &gsl_monitor_work, 1000);
#endif
print_info("[GSLX680] End %s\n", __func__);
return 0;
//exit_set_irq_mode:
error_req_irq_fail:
free_irq(ts->irq, ts);
error_mutex_destroy:
input_free_device(ts->input);
kfree(ts);
return rc;
}
static int gslX680_ts_init(struct i2c_client *client, struct gsl_ts *ts)
{
struct input_dev *input_device; // 定义一个 input_dev 结构体指针
int rc = 0;
printk("[GSLX680] Enter %s\n", __func__);
ts->dd = &devices[ts->device_id];
if (ts->device_id == 0) {
ts->dd->data_size = MAX_FINGERS * ts->dd->touch_bytes + ts->dd->touch_meta_data;
ts->dd->touch_index = 0;
}
ts->touch_data = kzalloc(ts->dd->data_size, GFP_KERNEL);
if (!ts->touch_data) {
pr_err("%s: Unable to allocate memory\n", __func__);
return -ENOMEM;
}
input_device = input_allocate_device(); // 给input_device指针申请分配内存
if (!input_device) {
rc = -ENOMEM;
goto error_alloc_dev;
}
ts->input = input_device; // 通过gsl_ts->input指针去指向input输入设备
input_device->name = GSLX680_I2C_NAME; // 设置input设备的名字
input_device->id.bustype = BUS_I2C; // 设置input设备的总线类型
input_device->dev.parent = &client->dev; // 设置input设备的父设备: /sys/devices/platform/s3c2410-i2cn/i2c-%d/%d-%04x
// 但是通过后面的分析可知,最终不是这个父设备
input_set_drvdata(input_device, ts); // 将gsl_ts结构体作为input设备的私有数据区中的设备驱动数据
// 以下是对input_dev 输入设备的一些设置 设置input设备可以上报的事件类型
set_bit(EV_ABS, input_device->evbit);
set_bit(BTN_TOUCH, input_device->keybit);
set_bit(EV_ABS, input_device->evbit);
set_bit(EV_KEY, input_device->evbit);
input_set_abs_params(input_device, ABS_X, 0, SCREEN_MAX_X, 0, 0);
input_set_abs_params(input_device, ABS_Y, 0, SCREEN_MAX_Y, 0, 0);
input_set_abs_params(input_device, ABS_PRESSURE, 0, 1, 0, 0);
#ifdef HAVE_TOUCH_KEY
input_device->evbit[0] = BIT_MASK(EV_KEY);
//input_device->evbit[0] = BIT_MASK(EV_SYN) | BIT_MASK(EV_KEY) | BIT_MASK(EV_ABS);
for (i = 0; i < MAX_KEY_NUM; i++)
set_bit(key_array[i], input_device->keybit);
#endif
client->irq = IRQ_PORT; // 触摸屏使用到的中断号
ts->irq = client->irq; //
ts->wq = create_singlethread_workqueue("kworkqueue_ts");
if (!ts->wq) {
dev_err(&client->dev, "Could not create workqueue\n");
goto error_wq_create;
}
flush_workqueue(ts->wq);
INIT_WORK(&ts->work, gslX680_ts_worker); // 初始化工作队列 当发生中断的时候在在中断处理函数中就会调用这个工作队列
// 作为中断的下半部
rc = input_register_device(input_device); // 注册input设备
if (rc)
goto error_unreg_device;
return 0;
error_unreg_device:
destroy_workqueue(ts->wq);
error_wq_create:
input_free_device(input_device);
error_alloc_dev:
kfree(ts->touch_data);
return rc;
}
中断上半部是probe函数绑定gsl_ts_irq,下半部gslX680_ts_worker
gslX680_ts_worker-->gsl_ts_read-->i2c_master_recv-->i2c_transfer-->adap->algo->master_xfer(adap, msgs, num)
gsl_ts_write-->i2c_master_send-->i2c_transfer-->adap->algo->master_xfer(adap, msgs, num)
工作流程:触摸屏按下并-->触摸屏IC完成AD转换-->中断信号到I2C控制器-->I2C设备驱动层中断函数-->核心层调用I2C总线驱动层的通信算法到缓冲区
中断
中断上下文不能和用户空间数据交互,不能交出CPU(不能休眠、不能schedule)
中断上文中可处理其他更紧急事务
中断下文处理策略:tasklet(小任务),workqueue(工作队列)
任务急切且少在tasklet执行,所不急迫且任务多在workqueue中执行
demo1:
使用中断上下文(tasklet,workqueue)实现按键捕获
写应用程序捕获触摸屏反馈信息
button_tasklet_workqueue-x210.c
#include <linux/input.h>
#include <linux/module.h>
#include <linux/init.h>
#include <asm/irq.h>
#include <asm/io.h>
#include <mach/irqs.h>
#include <linux/interrupt.h>
#include <linux/gpio.h>
#define BUTTON_IRQ IRQ_EINT2
static struct input_dev *button_dev;
//void func(unsigned long data)
void func(struct work_struct *work)
{
int flag;
printk("bottom half\n");
s3c_gpio_cfgpin(S5PV210_GPH0(2), S3C_GPIO_SFN(0x0)); // input模式
flag = gpio_get_value(S5PV210_GPH0(2));
s3c_gpio_cfgpin(S5PV210_GPH0(2), S3C_GPIO_SFN(0x0f)); // eint2模式
input_report_key(button_dev, KEY_LEFT, !flag);
input_sync(button_dev);
}
//DECLARE_TASKLET(button_tasklet, func, 0);
DECLARE_WORK(button_work, func);
static irqreturn_t button_interrupt(int irq, void *dummy)
{
printk("top half\n");
//tasklet_schedule(&button_tasklet);
schedule_work(&button_work);
return IRQ_HANDLED;
}
static int __init button_init(void)
{
int error;
error = gpio_request(S5PV210_GPH0(2), "GPH0_2");
if(error)
printk("key-s5pv210: request gpio GPH0(2) fail");
s3c_gpio_cfgpin(S5PV210_GPH0(2), S3C_GPIO_SFN(0x0f)); // eint2模式
if (request_irq(BUTTON_IRQ, button_interrupt, IRQF_TRIGGER_FALLING | IRQF_TRIGGER_RISING, "button-x210", NULL))
{
printk(KERN_ERR "key-s5pv210.c: Can't allocate irq %d\n", BUTTON_IRQ);
goto err_free_gpio;
}
button_dev = input_allocate_device();
if (!button_dev)
{
printk(KERN_ERR "key-s5pv210.c: Not enough memory\n");
error = -ENOMEM;
goto err_free_irq;
}
button_dev->evbit[0] = BIT_MASK(EV_KEY);
button_dev->keybit[BIT_WORD(KEY_LEFT)] = BIT_MASK(KEY_LEFT);
error = input_register_device(button_dev);
if (error)
{
printk(KERN_ERR "key-s5pv210.c: Failed to register device\n");
goto err_free_dev;
}
return 0;
err_free_dev:
input_free_device(button_dev);
err_free_irq:
free_irq(BUTTON_IRQ, button_interrupt);
return error;
err_free_gpio:
gpio_free(S5PV210_GPH0(2));
return error;
}
static void __exit button_exit(void)
{
input_unregister_device(button_dev);
input_free_device(button_dev);
free_irq(BUTTON_IRQ, NULL);
gpio_free(S5PV210_GPH0(2));
}
module_init(button_init);
module_exit(button_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("cxb");
MODULE_DESCRIPTION("button module");
MODULE_ALIAS("button");button.c
#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <linux/input.h>
#include <string.h>
#define X210_KEY "/dev/input/event2"
int main(void)
{
int fd = -1, ret = -1;
struct input_event ev;
fd = open(X210_KEY, O_RDONLY);
if (fd < 0)
{
perror("open");
return -1;
}
while (1)
{
memset(&ev, 0, sizeof(struct input_event));
ret = read(fd, &ev, sizeof(struct input_event));
if (ret != sizeof(struct input_event))
{
perror("read");
close(fd);
return -1;
}
printf("-------------------------\n");
printf("type: %hd\n", ev.type);
printf("code: %hd\n", ev.code);
printf("value: %d\n", ev.value);
printf("\n");
}
close(fd);
return 0;
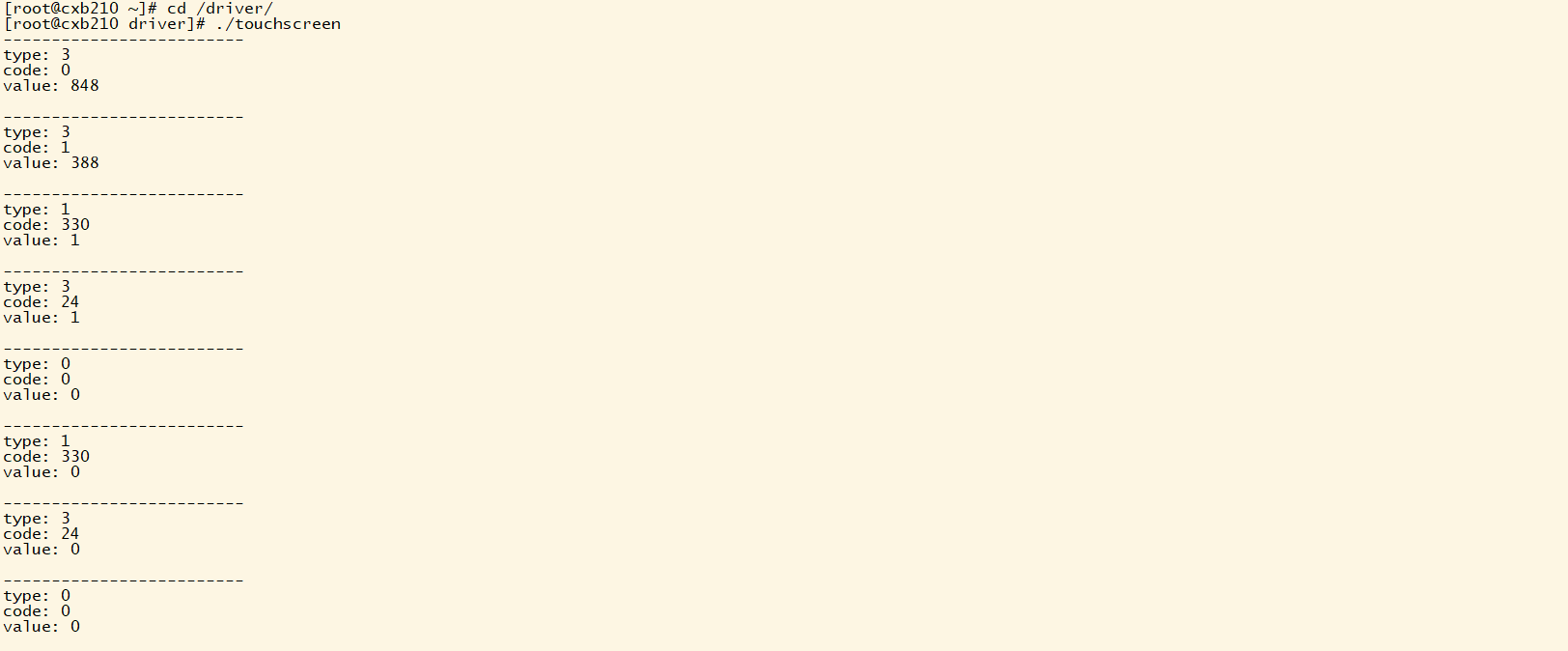
}touchscreen.c
#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <linux/input.h>
#include <string.h>
#define X210_TOUCHSCREEN "/dev/input/event1"
int main(void)
{
int fd = -1, ret = -1;
struct input_event ev;
fd = open(X210_TOUCHSCREEN, O_RDONLY);
if (fd < 0)
{
perror("open");
return -1;
}
while (1)
{
memset(&ev, 0, sizeof(struct input_event));
ret = read(fd, &ev, sizeof(struct input_event));
if (ret != sizeof(struct input_event))
{
perror("read");
close(fd);
return -1;
}
printf("-------------------------\n");
printf("type: %hd\n", ev.type);
printf("code: %hd\n", ev.code);
printf("value: %d\n", ev.value);
printf("\n");
}
close(fd);
return 0;
}Makefile
KERN_DIR = /root/kernel
obj-m += button_tasklet_workqueue-x210.o
all:
make -C $(KERN_DIR) M=`pwd` modules
arm-linux-gcc touchscreen.c -o touchscreen
arm-linux-gcc button.c -o button
cp:
cp *.ko touchscreen button /root/rootfs/driver -f
.PHONY: clean
clean:
make -C $(KERN_DIR) M=`pwd` modules clean
rm -rf touchscreen button结果如图所示:
button

touch screen