文章目录
- 方法一:一键安装(推荐)
- 方法二:逐步安装(常规安装方式)
- 1.版本选择
- 2.检查 Ubuntu 的软件和更新源
- 3.设置 ROS 的下载源
- 3.1 设置国内下载源
- 3.2 设置公匙
- 3.3 更新软件包
- 4. 安装 ROS
- 5. 设置环境变量
- 6. 安装 rosdep
- 7. 初始化
- 8.更新
本节课适用于Jetson Nano 官方镜像下从0 开始搭建ROS 环境,这里提供两种ROS 系
统的安装方式,“方法一”为一键安装,只需要一条指令即可自动安装整个ROS 系统;“方
法二”则需要设置下载源配置、设置环境变量等步骤。
如果你是初次接触ROS 的用户,建议选择“方法一”一键即可快速安装,在后续根据
个人需求可选择“方法二”进行体验。
方法一:一键安装(推荐)
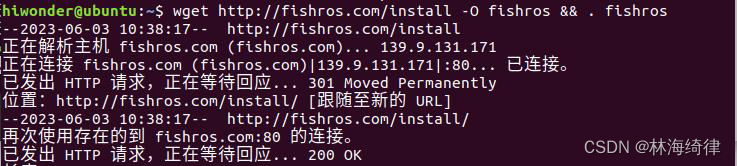
打开命令行终端。在终端输入指令“wget http://fishros.com/install -O fishros && . fishros”,按下回车,然后输入密码。
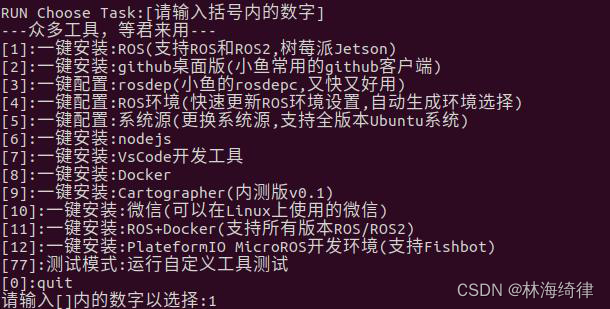
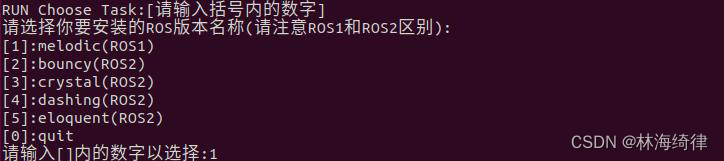
接下来输入数字1,选择一键安装ROS。
在首次安装时需要换源并清理第三方源,所以输入数字1选择更换系统源再安装。

输入数字2选择更换系统源并清理第三方源。

输入数字1 选择安装melodic(ROS1)版本。
输入数字1选择安装melodic(ROS1)桌面版,等待安装成功即可。

方法二:逐步安装(常规安装方式)
1.版本选择
不同的 Ubuntu 安装的 ROS 版本不同,其中 Ubuntu18.04 的 ROS 对应版本为Melodic。
| Ubuntu版本 | ROS版本 |
|---|---|
| Ubuntu16.04 | Kinetic |
| Ubuntu18.04 | Melodic |
| Ubuntu20.04 | Noetic |
2.检查 Ubuntu 的软件和更新源
- 找到系统中的“软件和更新”。

- 确保勾上互联网下载的选项,下载源更换成国内的,以阿里云为例。

3.设置 ROS 的下载源
3.1 设置国内下载源
打开命令行终端,输入指令:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
按下回车,接着输入虚拟机的密码“ubuntu”(此密码为用户自行设置的,我们这里的密码为 ubuntu)。

3.2 设置公匙
输入指令
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654

3.3 更新软件包
输入指令sudo apt update。

4. 安装 ROS
打开命令行终端,输入指令
sudo apt install ros-melodic-desktop-full
等待下载安装完成,根据网络状况不同,安装过程大概要 10 分钟。

5. 设置环境变量
打开命令行终端,依次输入指令
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
完成环境变量配置。

6. 安装 rosdep
输入指令
sudo apt-get install python3-rosdep
按下回车,安装 rosdep;出现安装确认提示,输入“Y”即可。

7. 初始化
- 输入指令
cd /etc/ros/rosdep/sources.list.d进入“sources.list.d”文件夹。

- 输入指令
sudo gedit 20-default.list,编辑此文件。

- 将原文件中的内容替换为以下内容(直接复制、粘贴,不需要换行,也不要手动输入)。
# os-specific li# os-specific listings first yaml
https://gitee.com/wybros/rosdistro/raw/master/rosdep/osx-homebrew.yaml osx # generic yaml
https://gitee.com/wybros/rosdistro/raw/master/rosdep/base.yaml yaml
https://gitee.com/wybros/rosdistro/raw/master/rosdep/python.yaml yaml
https://gitee.com/wybros/rosdistro/raw/master/rosdep/ruby.yaml gbpdistro
https://gitee.com/wybros/rosdistro/raw/master/releases/fuerte.yaml fuerte # newer distributions
(Groovy, Hydro, ...) must not be listed anymore, they are being fetched from the rosdistro
index.yaml instead
- 修改过程中,终端会出现警告,属于正常现象,不必理会
- 替换完成后,直接点击保存再关闭文件。

- 输入指令“cd /usr/lib/python2.7/dist-packages/rosdep2/”,进入到“rosdep2”目录下

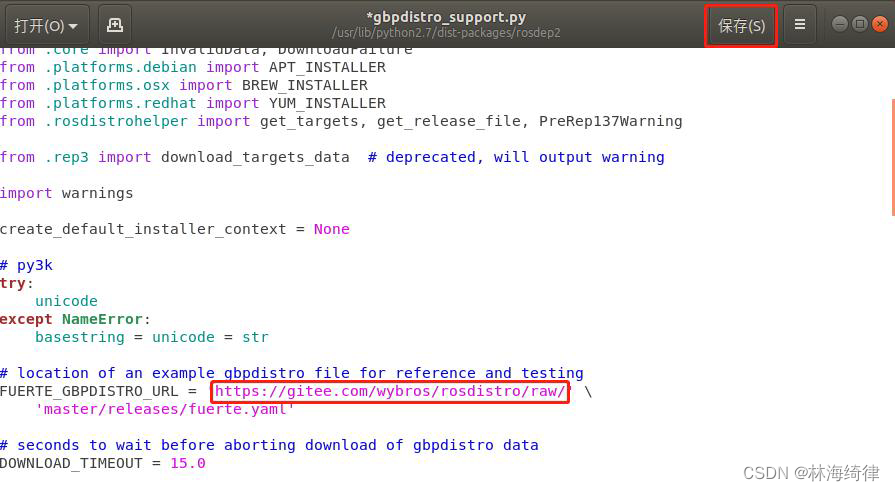
- 输入指令“sudo gedit gbpdistro_support.py”按下回车,若提示有输入虚拟机密码的提示,我们输入“ubuntu”(此密码为用户自行设置的,我们这里的密码为 ubuntu),按下回车,即可打开“gbpdistro_support.py”文 件,找到“FUERTE_GBPDISTRO_URL”代码。


- 将“https://raw.githubusercontent.com/ros/rosdistro/”修改为
https://gitee.com/wybros/rosdistro/raw/,(只修改下图红框所示内容,后续内容无需更改)修改完成后点击保存,关闭即可
- 接着输入指令
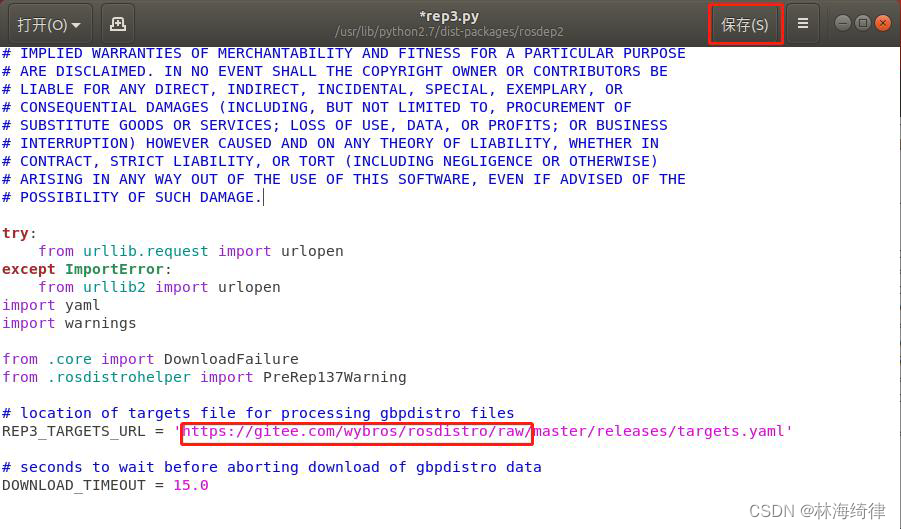
sudo gedit rep3.py,打开“rep3.py”文件,找到“REP3_TARGETS_URL”代码。


- 将“https://raw.githubusercontent.com/ros/rosdistro/”修改为“https://gitee.com/wybros/rosdistro/raw/”,(只修改下图红框所示内容,后续内容无需更改)修改完成后点击保存,关闭即可。
- 接着输入指令
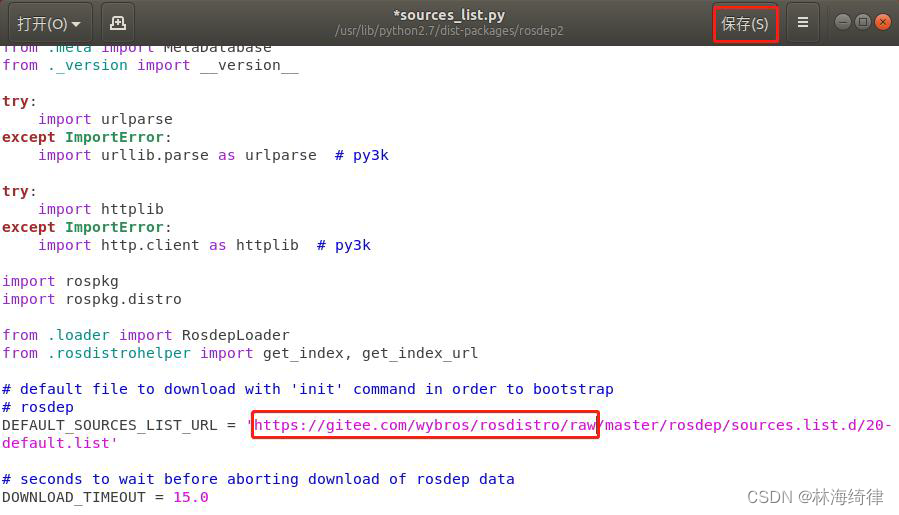
sudo gedit sources_list.py,打开“sources_list.py”文件,找到“DEFAULT_SOURCES_LIST_URL”代码。


- 将“https://raw.githubusercontent.com/ros/rosdistro/”修改为
https://gitee.com/wybros/rosdistro/raw/,(只修改下图红框所示内容,后续内容无需更改)修改完成后点击保存,关闭即可。
- 输入指令
cd /usr/lib/python2.7/dist-packages/rosdistro/,进入“rosdistro”目录下。

- 输入指令
sudo gedit __init__.py,进入“init.py”文件,找到“DEFAULT_INDEX_URL”代码。


- 将“https://raw.githubusercontent.com/ros/rosdistro/”修改为
https://gitee.com/wybros/rosdistro/raw/,(只修改下图红框所示内容,后续内容无需更改)修改完成后点击保存,关闭即可。

8.更新
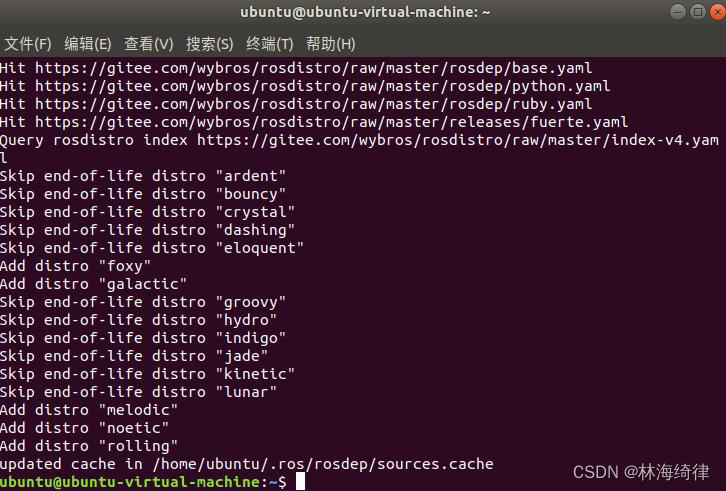
打开新的命令行终端,输入指令rosdep update更新。

出现如下信息,则代表更新成功了。
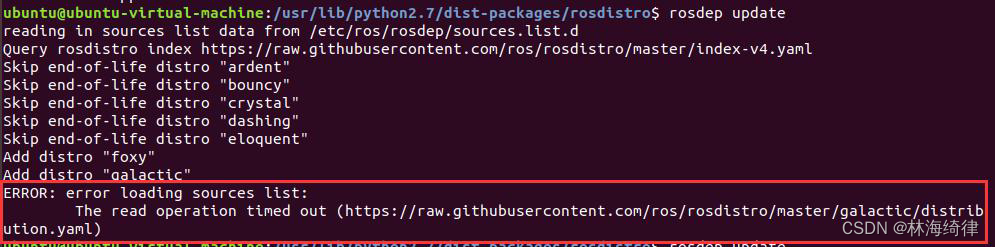
若出现下图读取超时的提示,可能是网络原因,用户可多输入几次rosdep update尝试更新;若还是更新不了,用户可检查“1.7 初始化”的内容,确保修改的内容无误,后再次输入“rosdep update”进行更新。





![[Python练习]使用Python爬虫爬取豆瓣top250的电影的页面源码](https://img-blog.csdnimg.cn/direct/a736d872c6fc410b9c31bb70c1d3f03b.png)

![[足式机器人]Part2 Dr. CAN学习笔记-Advanced控制理论 Ch04-17 串讲](https://img-blog.csdnimg.cn/direct/d133933db11248f5a59dae0d309219fa.png#pic_center)