论文题目:Baidu Apollo EM Motion Planner
0 前言 EM和Lattice算法对比
EM plannerLattice Planner参数较多(DP/QP,Path/Speed)参数少且统一化流程复杂流程简单单周期解空间受限简单场景解空间较大能适应复杂场景适合简单场景
…
文章目录 Terminology Terminology
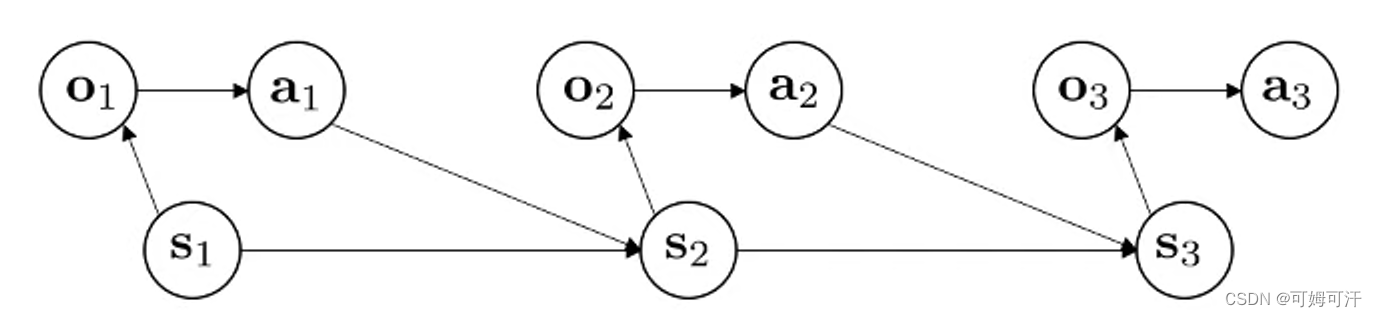
st : stateot : observationat : action π θ ( a t ∣ o t ) \pi_\theta (a_t | o_t) πθ(at∣ot) : policy π θ ( a t ∣ s t ) \pi_\theta (a_t | s_t) πθ(at∣st) : policy (fully observed) Observation result from…