上一篇文章中转述了网友的文章,因回原点实在重要,再详细描述DSZR指令。
DSZR是具有自动搜索功能的原点回归指令。它对当前位置没有要求,在任意位置哪怕是停止在限位开关位置上都能完成原点回归操作。
1.指令格式

S1 原点回归速度或存储了数据的字软元件编号
S2 爬行速度或存储了数据的字软元件编号
D1 输出脉冲的轴编号k1~k4
D2为指令执行结束、异常结束标志位的位软元件编号
(2)动作分析
当近点dog信号和零点信号指定为同一软元件,当原点回归零点信号数为1时,
原点回归结束时的停止方法此信号OFF。
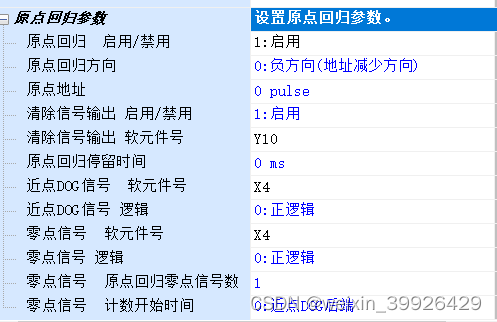
此种方法适用于步进马达(没加编码器)的回原点。
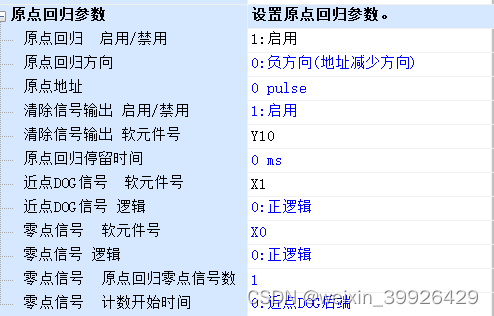
当近点dog信号和零点信号指定为不同软元件时,当原点回归以爬行速度向原点运行时,如果检测到DOG开关信号有ON变为OFF后并不停止脉冲的输出,而是直到检测到第一个零点信号的上升沿(从OFF变为ON时)后才立即停止脉冲的输出。
在脉冲停止输出1ms内,清零信号输出并保持20ms+1个扫描周期内为on.同时将当前值寄存器清0,当清零信号复位后发出在一个扫描周期内为ON的指令执行结束信号M8029

(3)近点信号(DOG)S1
它是原点回归中进行速度变换的信号。如果有正负限位,DOG信号必须位于正负限位之间。
在应用中,近点信号最好接如到基本单元的X0~X17端口。
(4)零点信号S2
零点信号最好接到基本单元的X0~X7.
DSZR指令零点信号的引入使原点回归动作的定位精度(指原点位置的误差减小)得到很大提高。
一般把电动机编码器的零点信号(Z相)作为DSZR指令的零点信号,而Z相信号是固定的。