文章目录
前言
10 可用频率范围
11 DUTY_CYCLE 设置
12 低延迟模式
13 先听后说 (LBT)
14 升级无线电固件
15 MAVLink协议说明

前言
本文提供 SiK 遥测无线电(SiK Telemetry Radio)的高级配置信息。它面向"高级用户"和希望更好地了解无线电如何运行的用户。
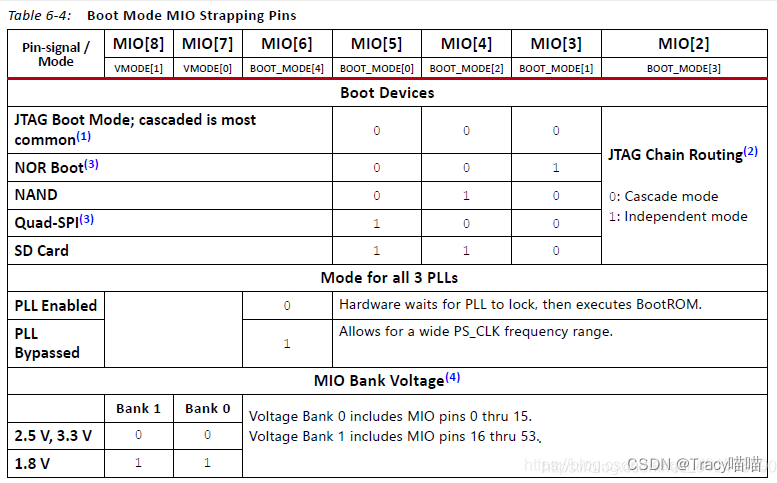
10 可用频率范围
下表可以帮助你将当地的无线电法规与两种无线电型号进行比对。
| Radio | Minimum Frequency (MHz) | Maximum Frequency (MHz) |
| 433 | 414.0 | 454.0 |
| 900 | 895.0 | 935.0 |
11 DUTY_CYCLE 设置
大多数用户希望将 DUTY_CYCLE 设置为 100。DUTY_CYCLE 是无线电发送数据包的最大时间百分比。
之所以包含占空比,是因为如果占空比低于给定的阈值,世界上有些地区允许更高的发射功率或更多的频率。例如,在欧洲,如果占空比低于 10%,就可以在 433 频段中发射更多频率。
如果将占空比设置为低于 100%,可用带宽就会减少,因此只有在波特率较高时才能很好地进行遥测。在占空比为 10% 的情况下,从 ArduPilot 获取良好的遥测数据仍然非常实用,因为遥测流量非常"突发",所以平均发送时间通常不会很长。
例如,在 AIR_SPEED 设置为 128、启用 ECC 和 DUTY_CYCLE 设置为 10 的情况下,你可以轻松地以 2Hz 的频率接收所有遥测数据流。
你也可以将 DUTY_CYCLE 设置为 0,从而将无线电设置为只接收。如果将 NUM_CHANNELS 设置为较低的数字,效果会更好,否则时钟同步性会很差。
12 低延迟模式
无线电可配置为使用"低延迟模式",以提高基于平板电脑的操纵杆等的性能......启用该模式应设置以下两个参数:
- 将 MAVLINK 设置为 2。 这将开启对操纵杆控制中使用的 RC_OVERRIDE 数据包的特殊检查,使这些数据包总是先发送。如果你正在使用 MAVLink(你可能正在使用),选择此设置不会有任何坏处;
- 将 MAX_WINDOW 从默认值 131 改为 33。这将确保 GCS 至少每 33 毫秒向飞行器发送一次数据包。值得注意的是,这会降低可用带宽,因此如果需要绝对最大带宽,最好使用默认值 131。一个通道上的两个无线电必须具有相同的参数值,否则将无法相互通话。
13 先听后说 (LBT)
无线电可执行"先监听后通话"(LBT)功能,以符合更广泛的地区监管要求。LBT 是一种系统,要求无线电监听一段时间,在没有其他无线电信号时才允许发射。通过使用一个非零的 LBT_RSSI 值,你的无线电将变得更加"礼貌",等到其他无线电都停止发射后才开始发射。
要在无线电中启用 LBT,需要设置 LBT_RSSI 门限。这是无线电认为表明信道繁忙的信号强度。如果将 LBT_RSSI 设置为零,则禁用 LBT。
最小非零设置为 25,比无线电接收灵敏度(-121 dBm)高几个 dB。要设置 LBT_RSSI,你需要了解当地无线电法规对 LBT 功能要求的信号电平。LBT_RSSI 在 25 以上的每个增量大致等于无线电接收灵敏度以上 0.5dB。因此,如果你将 LBT_RSSI 设置为 40,那么如果信号强度比接收灵敏度高出 7.5dB,无线电就会认为信道是空闲的。
或者,你也可以使用此公式获得以 dBm 为单位的接收信号强度:
signal_dBm = (RSSI / 1.9) - 127
此公式为近似值,但相当接近。有关更精确的图表,请参阅 Si1000 数据表。
你需要查询当地的监管要求,以了解应使用何种 LBT_RSSI 设置。
根据欧洲 9.2.2.2 规则,无线电中的 LBT 执行使用最少 5ms 的监听时间和随机监听时间。
请注意,在许多地区,你需要结合 AFA(自适应频率灵活性)实施 LBT。只要将 NUM_CHANNELS 设置为 1 以上,无线电就能实现 AFA。
14 升级无线电固件
无线电的固件是开源的(open source),有时会增加新功能。
最简单的升级方法是:
- 使用微型 USB 调试线将要升级的无线电连接到电脑上;
- 打开任务规划器,进入初始设置 | 可选硬件 | SiK 无线电页面;
- 选择正确的 COM 端口,并将波特率设置为 57600。确保"连接"按钮处于断开状态,如下图所示;
- 按"上传固件(本地)"按钮,经过短暂延迟后,"编程"信息将出现,绿条将从左到右缓慢增加。

两个无线电都应执行上述过程。
!Note
新的固件更新有时会修改某些设置,因此最好比较一下更新前后的设置,看看是否有变化。
15 MAVLink协议说明

MAVLink 是一种非常轻量级的消息传输协议, 用于地面控制终端(地面站)与无人机之间 (以及机载无人机组件之间) 进行通信。
Mavlink 遵循现代混合发布-订阅和点对点设计模式:数据流作为 topics 发送/发布的, 而配置子协议 (如 路径点协议 或 参数协议)是基于重传机制的点对点模式。
消息内容定义于与之关联的xml 文件中。 每个 xml 文件对应一个特定的 MAVLink 系统,并为该系统定义了专属的消息集(亦被称之为“语支dialect”)。 大部分 地面站和自动驾驶仪所采用的“通用消息集”定义于 common.xml 中 (大多数“语支”均是基于“通用消息集“构建 的:即,大多数“语支”所对应的 xml 文件里,均包含了 common.xml) 。
!Note
基于C封装的 MAVLink 库,是一个 header-only 库, 其针对资源受限系统有限的 ram 和闪存,进行了高度优化。 这种库,已经过现场验证, 并部署在许多产品中, 充当不同厂家组件之间的交互性接口。
MAVLink 于2009年初由 Lorenz Meier 首次发布, 目前为止,已拥有数量可观的贡献者。








![[C#]winform部署PaddleOCRV3推理模型](https://img-blog.csdnimg.cn/direct/ee920d6c2014440b856bf28084bb2d9a.jpeg)