SDK版本:2018.3
写在前面:
该文档不足以使你清楚FSBL启动的寄存器级的操作细节,但可以让你看明白整个ZYNQ7000 FSBL代码执行的主要流程。
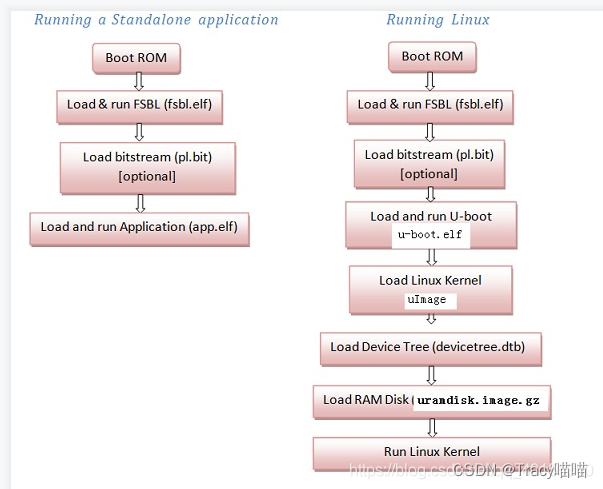
1. ZYNQ7000加载启动流程

(1)BootRom阶段为ARM上电后最早加载的代码,根据MIO引脚配置确认加载方式,初始化相应的启动介质,加载FSBL到OCM中,把控制权交给FSBL
(2)FSBL阶段完成PS的初始化,加载PL bit流文件,加载SSBL引导程序或者ARM的裸机程序
(3)SSBL阶段分两种情况:①裸机程序直接在DDR中执行②uboot引导加载kernel的过程
2. FSBL代码分析
(1)在文件FSBL_bsp/standalone_v6_5/src/asm_ventors.S中,声明了一个代码段,位于地址0处。开机后PS自动执行地址0处的指令,其中第一行代码为一个跳转:B _boot
.org 0
.text
.globl _vector_table
.section .vectors
_vector_table:
B _boot
B Undefined
B SVCHandler
B PrefetchAbortHandler
B DataAbortHandler
NOP /* Placeholder for address exception vector*/
B IRQHandler
B FIQHandler(2)在同目录下找到文件boot.S中可以看到_boot标号下的代码,_boot会对系统做一系列的初始化,包括DDR,中断,MMU,cache等,执行完成后PS将具有执行C代码的能力。
可以看到在_boot代码最后又执行了一次跳转:b _start
b _start /* jump to C startup code */
and r0, r0, r0 /* no op */(3)在同目录下找到文件xil-crt0.S中可以看到_start标号下的代码,可以看到_start首先执行跳转:bl __cpu_init去执行CPU初始化操作
_start:
bl __cpu_init /* Initialize the CPU first (BSP provides this) */
mov r0, #0
/* clear sbss */
ldr r1,.Lsbss_start /* calculate beginning of the SBSS */
ldr r2,.Lsbss_end /* calculate end of the SBSS */(4)在_start标号代码的末尾可以看到bsp完成了所有的初始化工作,将跳转到main函数开始执行。
/* make sure argc and argv are valid */
mov r0, #0
mov r1, #0
/* Let her rip */
bl main(5)回到FSBL工程,在目录FSBL/src/main.c中找到main函数,可以看到第一步就是调用了ps7_init()函数。
ps7_init()函数位于ps7_init.c文件中,这个C文件是由XPS根据用户的配置自动生成的。
查看ps7_init()函数,根据代码可以很明显可以看出该函数其实就是根据PS版本执行了MIO,PLL,CLK,DDR和其他外设的初始化。
int main(void)
{
u32 BootModeRegister = 0;
u32 HandoffAddress = 0;
u32 Status = XST_SUCCESS;
/*
* PCW initialization for MIO,PLL,CLK and DDR
*/
Status = ps7_init();
if (Status != FSBL_PS7_INIT_SUCCESS) {
fsbl_printf(DEBUG_GENERAL,"PS7_INIT_FAIL : %s\r\n",
getPS7MessageInfo(Status));
OutputStatus(PS7_INIT_FAIL);
/*
* Calling FsblHookFallback instead of Fallback
* since, devcfg driver is not yet initialized
*/
FsblHookFallback();
}int
ps7_init()
{
// Get the PS_VERSION on run time
unsigned long si_ver = ps7GetSiliconVersion ();
int ret;
//int pcw_ver = 0;
if (si_ver == PCW_SILICON_VERSION_1) {
ps7_mio_init_data = ps7_mio_init_data_1_0;
ps7_pll_init_data = ps7_pll_init_data_1_0;
ps7_clock_init_data = ps7_clock_init_data_1_0;
ps7_ddr_init_data = ps7_ddr_init_data_1_0;
ps7_peripherals_init_data = ps7_peripherals_init_data_1_0;
//pcw_ver = 1;
} else if (si_ver == PCW_SILICON_VERSION_2) {
ps7_mio_init_data = ps7_mio_init_data_2_0;
ps7_pll_init_data = ps7_pll_init_data_2_0;
ps7_clock_init_data = ps7_clock_init_data_2_0;
ps7_ddr_init_data = ps7_ddr_init_data_2_0;
ps7_peripherals_init_data = ps7_peripherals_init_data_2_0;
//pcw_ver = 2;
} else {
ps7_mio_init_data = ps7_mio_init_data_3_0;
ps7_pll_init_data = ps7_pll_init_data_3_0;
ps7_clock_init_data = ps7_clock_init_data_3_0;
ps7_ddr_init_data = ps7_ddr_init_data_3_0;
ps7_peripherals_init_data = ps7_peripherals_init_data_3_0;
//pcw_ver = 3;
}
// MIO init
ret = ps7_config (ps7_mio_init_data);
if (ret != PS7_INIT_SUCCESS) return ret;
// PLL init
ret = ps7_config (ps7_pll_init_data);
if (ret != PS7_INIT_SUCCESS) return ret;
// Clock init
ret = ps7_config (ps7_clock_init_data);
if (ret != PS7_INIT_SUCCESS) return ret;
// DDR init
ret = ps7_config (ps7_ddr_init_data);
if (ret != PS7_INIT_SUCCESS) return ret;
// Peripherals init
ret = ps7_config (ps7_peripherals_init_data);
if (ret != PS7_INIT_SUCCESS) return ret;
//xil_printf ("\n PCW Silicon Version : %d.0", pcw_ver);
return PS7_INIT_SUCCESS;
}(6)System Software Reset,使能系统软件复位功能
/*
* Unlock SLCR for SLCR register write
*/
SlcrUnlock();(7)关闭cache功能
/*
* Flush the Caches
*/
Xil_DCacheFlush();
/*
* Disable Data Cache
*/
Xil_DCacheDisable();(8)注册异常中断
/*
* Register the Exception handlers
*/
RegisterHandlers();这里相当于异常处理函数全部指向0地址。
Xil_ExceptionRegisterHandler(XIL_EXCEPTION_ID_UNDEFINED_INT,
(Xil_ExceptionHandler)Undef_Handler,
(void *) 0); XExc_VectorTable[Exception_id].Handler = Handler;
XExc_VectorTable[Exception_id].Data = Data;(9)DDR读写测试,在DDR不同地址段进行读写比对
/*
* DDR Read/write test
*/
Status = DDRInitCheck();
if (Status == XST_FAILURE) {
fsbl_printf(DEBUG_GENERAL,"DDR_INIT_FAIL \r\n");
/* Error Handling here */
OutputStatus(DDR_INIT_FAIL);
/*
* Calling FsblHookFallback instead of Fallback
* since, devcfg driver is not yet initialized
*/
FsblHookFallback();
}(10)Processor Configuration Access Port即处理器配置接口,连接软件和硬件的桥梁。
/*
* PCAP initialization
*/
Status = InitPcap();
if (Status == XST_FAILURE) {
fsbl_printf(DEBUG_GENERAL,"PCAP_INIT_FAIL \n\r");
OutputStatus(PCAP_INIT_FAIL);
/*
* Calling FsblHookFallback instead of Fallback
* since, devcfg driver is not yet initialized
*/
FsblHookFallback();
}
fsbl_printf(DEBUG_INFO,"Devcfg driver initialized \r\n"); 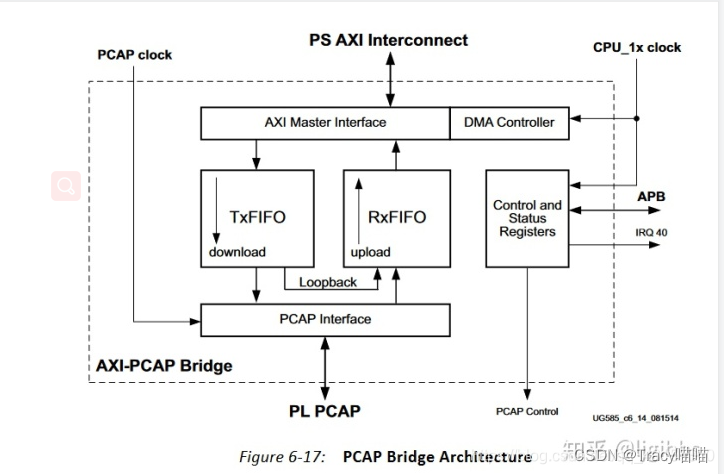
(11)获取PS版本号
/*
* Get the Silicon Version
*/
GetSiliconVersion();(12)获取PCAP接口控制器配置信息,检查是否允许系统复位
/*
* Get PCAP controller settings
*/
PcapCtrlRegVal = XDcfg_GetControlRegister(DcfgInstPtr);
/*
* Check for AES source key
*/
if (PcapCtrlRegVal & XDCFG_CTRL_PCFG_AES_FUSE_MASK) {
/*
* For E-Fuse AES encryption Watch dog Timer disabled and
* User not allowed to do system reset
*/
#ifdef XPAR_XWDTPS_0_BASEADDR
fsbl_printf(DEBUG_INFO,"Watchdog Timer Disabled\r\n");
XWdtPs_Stop(&Watchdog);
#endif
fsbl_printf(DEBUG_INFO,"User not allowed to do "
"any system resets\r\n");
}(13)配置FSBL正在执行状态
/*
* Store FSBL run state in Reboot Status Register
*/
MarkFSBLIn();(14)读取启动模式寄存器,启动模式是通过MIO引脚来配置的,要配置相应的启动模式可以参考下图中MIO各个引脚在不同模式的配置情况
/*
* Read bootmode register
*/
BootModeRegister = Xil_In32(BOOT_MODE_REG);
BootModeRegister &= BOOT_MODES_MASK;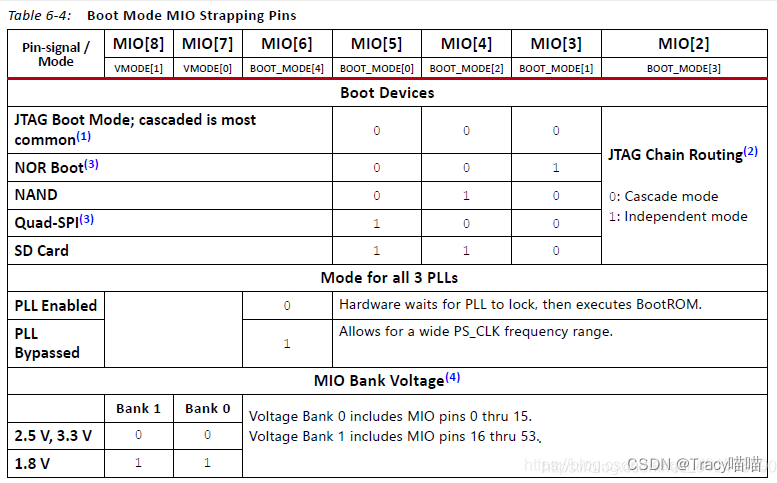
(15)根据启动模式初始化对应的存储设备
QSPI启动
①初始化qspi Flash
②MoveImage = QspiAccess;函数指针赋值,实现从Norflash中拷贝image到内存中
if (BootModeRegister == QSPI_MODE) {
fsbl_printf(DEBUG_GENERAL,"Boot mode is QSPI\n\r");
InitQspi();
MoveImage = QspiAccess;
fsbl_printf(DEBUG_INFO,"QSPI Init Done \r\n");Norlflash启动
/*
* NOR BOOT MODE
*/
if (BootModeRegister == NOR_FLASH_MODE) {
fsbl_printf(DEBUG_GENERAL,"Boot mode is NOR\n\r");
/*
* Boot ROM always initialize the nor at lower speed
* This is the chance to put it to an optimum speed for your nor
* device
*/
InitNor();
fsbl_printf(DEBUG_INFO,"NOR Init Done \r\n");
MoveImage = NorAccess;JTAG启动
/*
* JTAG BOOT MODE
*/
if (BootModeRegister == JTAG_MODE) {
fsbl_printf(DEBUG_GENERAL,"Boot mode is JTAG\r\n");
/*
* Stop the Watchdog before JTAG handoff
*/
#ifdef XPAR_XWDTPS_0_BASEADDR
XWdtPs_Stop(&Watchdog);
#endif
/*
* Clear our mark in reboot status register
*/
ClearFSBLIn();
/*
* SLCR lock
*/
SlcrLock();
FsblHandoffJtagExit();(16)FlashReadBaseAddress是在上述流程中根据不同的启动设备进行初始化的。
通常情况下我们使用Norflash启动,InitQspi()函数中会对FlashReadBaseAddress赋值,就是qspi falsh的起始地址为0xFC000000,在zynq7000的数据手册UG585中可以看到。
/*
* Check for valid flash address
*/
if ((FlashReadBaseAddress != XPS_QSPI_LINEAR_BASEADDR) &&
(FlashReadBaseAddress != XPS_NAND_BASEADDR) &&
(FlashReadBaseAddress != XPS_NOR_BASEADDR) &&
(FlashReadBaseAddress != XPS_SDIO0_BASEADDR)) {
fsbl_printf(DEBUG_GENERAL,"INVALID_FLASH_ADDRESS \r\n");
OutputStatus(INVALID_FLASH_ADDRESS);
FsblFallback();
}
/*
* NOR and QSPI (parallel) are linear boot devices
*/
if ((FlashReadBaseAddress == XPS_NOR_BASEADDR)) {
fsbl_printf(DEBUG_INFO, "Linear Boot Device\r\n");
LinearBootDeviceFlag = 1;
}(17)接下来就是最关键的地方了,这个函数做两件事情①分析烧录到qspi中的数据的头的部分②根据分析结果拷贝数据到DDR中
/*
* Load boot image
*/
HandoffAddress = LoadBootImage();
fsbl_printf(DEBUG_INFO,"Handoff Address: 0x%08lx\r\n",HandoffAddress);(18)我们进入到函数LoadBootImage()中进一步分析代码
这段代码的作用是从multiboot寄存器中读取要执行的image的地址,其实如果就一个image的话可以不用管这个,这个算出来的imagestartaddress一定是0
/*
* read the multiboot register
*/
MultiBootReg = XDcfg_ReadReg(DcfgInstPtr->Config.BaseAddr,
XDCFG_MULTIBOOT_ADDR_OFFSET);
fsbl_printf(DEBUG_INFO,"Multiboot Register: 0x%08lx\r\n",MultiBootReg);
/*
* Compute the image start address
*/
ImageStartAddress = (MultiBootReg & PCAP_MBOOT_REG_REBOOT_OFFSET_MASK)
* GOLDEN_IMAGE_OFFSET;(19)解析Image即BOOT.bin的头信息
①从bootloader中解析出BOOT.bin的大小(这个信息后续未看到有使用)
②把BOOT.bin中header解析出partition header并保存到全局变量PartHeader PartitionHeader[MAX_PARTITION_NUMBER]中,实际有效的只有3个partitions,即FSBL.elf,FPGA.bit,application.elf
③根据解析出的partition header数据解析出partition的数量
/*
* Get partitions header information
*/
Status = GetPartitionHeaderInfo(ImageStartAddress);
if (Status != XST_SUCCESS) {
fsbl_printf(DEBUG_GENERAL, "Partition Header Load Failed\r\n");
OutputStatus(GET_HEADER_INFO_FAIL);
FsblFallback();
}PartHeader为BOOT.bin中解析出的各个partition的Header信息结构体
typedef struct StructPartHeader {
u32 ImageWordLen; /* 0x0 */
u32 DataWordLen; /* 0x4 */
u32 PartitionWordLen; /* 0x8 */
u32 LoadAddr; /* 0xC */
u32 ExecAddr; /* 0x10 */
u32 PartitionStart; /* 0x14 */
u32 PartitionAttr; /* 0x18 */ // 用来判断文件属性,例如FPGA.bit文件或者application.elf文件
u32 SectionCount; /* 0x1C */
u32 CheckSumOffset; /* 0x20 */
u32 Pads1[1];
u32 ACOffset; /* 0x28 */
u32 Pads2[4];
u32 CheckSum; /* 0x3C */
}PartHeader;这里需要了解一下BOOT.bin的结构。
在boot.bin中从地址0-0x8BF可以分成17个部分,每个部分都有一定的含义
1. 0x000 中断向量表
2. 0x020 固定值 0xaa995566
3. 0x024 固定值 0x584c4e58 ASCII: XLNX
4. 0x028 如果是0xa5c3c5a3或者0x3a5c3c5a为加密的
5. 0x02C bootrom头版本号,不用管
6. 0x030 从bootrom开始到app地址的总数(bytes)
7. 0x034 从loadimage拷到OCM的长度 【上电后BootRom会主动把FSBL拷贝到OCM中执行】
8. 0x038 目的地址到哪儿拷贝FSBL
9. 0x03C 开始执行的地址
10. 0x040 同7 【此处代码逻辑中其实是把该字段的值赋给FSBL的size】
11. 0x044 0x01为固定值
12. 0x048 校验和(从0x020-0x047)按32-bit word 相加取反
13. 0x04C bootgen相关
14. 0x098 image头的表指针
15. 0x09C partition头的表指针
16. 0x0A0 寄存器初始化的参数
17. 0x8A0 fsbl user defined
18. 0x8C0 fsbl开始的地方 (20)拿到partition header后应该分别加载各个partition,但由于第0个partition其实就是FSBL,而我们当前其实已经在FSBL执行中了,所以不用加载直接跳过从partitionNum = 1开始加载
/*
* First partition header was ignored by FSBL
* As it contain FSBL partition information
*/
PartitionNum = 1;(21)接下来开始加载对各个partition是类似的,主要完成两部分工作:
①解析并检查各个partition header中内容的正确性
②从norflash中加载各个partiton到指定的目标地址中。(这里对FPGA.bit和application.elf有所差别)
根据partition header中属性判断当前为bit文件或者application文件
if (PartitionAttr & ATTRIBUTE_PL_IMAGE_MASK) {
fsbl_printf(DEBUG_INFO, "Bitstream\r\n");
PLPartitionFlag = 1;
PSPartitionFlag = 0;
BitstreamFlag = 1;
}
if (PartitionAttr & ATTRIBUTE_PS_IMAGE_MASK) {
fsbl_printf(DEBUG_INFO, "Application\r\n");
PSPartitionFlag = 1;
PLPartitionFlag = 0;
ApplicationFlag = 1;
}该函数搬移partition数据到DDR中
/*
* Move partitions from boot device
*/
Status = PartitionMove(ImageStartAddress, HeaderPtr);
if (Status != XST_SUCCESS) {
fsbl_printf(DEBUG_GENERAL,"PARTITION_MOVE_FAIL\r\n");
OutputStatus(PARTITION_MOVE_FAIL);
FsblFallback();
}FPGA.bit和application.elf文件都是通过下面函数依次搬移传输到DDR中
if ((LinearBootDeviceFlag && PLPartitionFlag &&
(SignedPartitionFlag || PartitionChecksumFlag)) ||
(LinearBootDeviceFlag && PSPartitionFlag) ||
((!LinearBootDeviceFlag) && PSPartitionFlag && SecureTransferFlag)) {
/*
* PL signed partition copied to DDR temporary location
* using non-secure PCAP for linear boot device
*/
if(PLPartitionFlag){
SecureTransferFlag = 0;
LoadAddr = DDR_TEMP_START_ADDR;
}
/*
* Data transfer using PCAP
*/
Status = PcapDataTransfer((u32*)SourceAddr,
(u32*)LoadAddr,
ImageWordLen,
DataWordLen,
SecureTransferFlag);
if(Status != XST_SUCCESS) {
fsbl_printf(DEBUG_GENERAL, "PCAP Data Transfer Failed\r\n");
return XST_FAILURE;
}(22)如果partition为FPGA bit文件,那么通过以下函数完成从DDR中加载启动bit文件,这个函数中涉及PCAP的操作流程,这里不再深入探究。
/*
* Load Signed PL partition in Fabric
*/
if (PLPartitionFlag) {
Status = PcapLoadPartition((u32*)PartitionStartAddr,
(u32*)PartitionLoadAddr,
PartitionImageLength,
PartitionDataLength,
EncryptedPartitionFlag);
if (Status != XST_SUCCESS) {
fsbl_printf(DEBUG_GENERAL,"BITSTREAM_DOWNLOAD_FAIL\r\n");
OutputStatus(BITSTREAM_DOWNLOAD_FAIL);
FsblFallback();
}
}(23)至此函数LoadBootImage全部执行完成,当前已完成FPGA.bit加载,并且application也已经写入到DDR中。
在下面的函数中HandoffAddress应该为application partition header中的执行地址,也是application.elf保存在DDR中的基地址,即0x00100000
/*
* FSBL handoff to valid handoff address or
* exit in JTAG
*/
FsblHandoff(HandoffAddress);在该函数中最后通过FsblHandoffExit(FsblStartAddr)函数实现了FSBL到application.elf的跳转
if(FsblStartAddr == 0) {
/*
* SLCR lock
*/
SlcrLock();
fsbl_printf(DEBUG_INFO,"No Execution Address JTAG handoff \r\n");
FsblHandoffJtagExit();
} else {
fsbl_printf(DEBUG_GENERAL,"SUCCESSFUL_HANDOFF\r\n");
OutputStatus(SUCCESSFUL_HANDOFF);
FsblHandoffExit(FsblStartAddr);
}在src/fsbl_handoff.S文件中,bx lr指令实现了跳转到application开始执行
FsblHandoffExit:
mov lr, r0 /* move the destination address into link register */
mcr 15,0,r0,cr7,cr5,0 /* Invalidate Instruction cache */
mcr 15,0,r0,cr7,cr5,6 /* Invalidate branch predictor array */
dsb
isb /* make sure it completes */
ldr r4, =0
mcr 15,0,r4,cr1,cr0,0 /* disable the ICache and MMU */
isb /* make sure it completes */
bx lr /* force the switch, destination should have been in r0 */
.Ldone: b .Ldone /* Paranoia: we should never get here */
.end(24)以上FSBL运行加载FPGA.bit和引导application.elf执行过程代码分析全部完成。
参考资料:
https://blog.csdn.net/zhaoxinfan/article/details/54958641
https://blog.csdn.net/asmartkiller/article/details/84072643
https://blog.csdn.net/qq_40155300/article/details/89001808







![[C#]winform部署PaddleOCRV3推理模型](https://img-blog.csdnimg.cn/direct/ee920d6c2014440b856bf28084bb2d9a.jpeg)