前面的颜色识别、二维码识别都是使用了一些简单的图像处理功能,而更高
级的机器视觉就需要使用
KPU
。可以简单类别为计算机的
GPU
(显卡),本质是
实现高速的图像数据运算
我们来简单介绍一下 K210 的 KPU 。 KPU 是 K210 内部一个神经网络处理器,它可以在低功耗的情况下实现卷积神经网络计算,实时获取被检测目标的大小、坐标和种类,对人脸或者物体进行检测和分类。KPU 具备以下几个特点:➢ 支持主流训练框架按照特定限制规则训练出来的定点化模型➢ 对网络层数无直接限制,支持每层卷积神经网络参数单独配置,包括输入输出通道数目、输入输 出行宽列高➢ 支持两种卷积内核 1x1 和 3x3➢ 支持任意形式的激活函数➢ 实时工作时最大支持神经网络参数大小为 5.5MiB 到 5.9MiB➢ 非实时工作时最大支持网络参数大小为( Flash 容量 - 软件体积)
简单来说就是 KPU 能加载和运行不同的模型,实现各种机器视觉等功能。目前 K210 的 KPU 上主要跑 YOLO ( You Only Look Once )框架的目标检测算法来实现。通过 micropython 的封装让我们可以不关心底层实现原理,非常方便的使用起来。我们来看一下通过 KPU 运行 Yolo 的对象用法
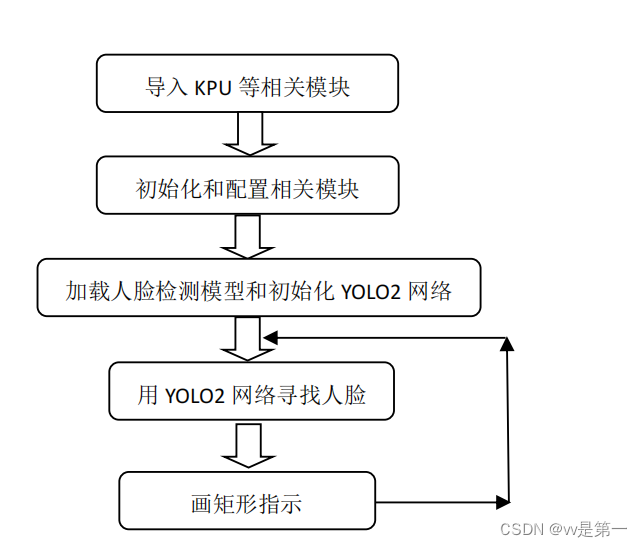
1:人脸检测
实验目的:
将摄像头拍摄到的画面中的人脸用矩形框表示出来。
实验讲解:
从上表可以看到通过
KPU
模块直接加载
YOLO2
网络,再结合人脸检测模型
来实现人脸识别。具体编程思路如下:
#实验名称:人脸检测
#翻译和注释:01Studio
#导入相关模块
import sensor, image, time, lcd, gc
from maix import KPU
#lcd初始化
lcd.init()
#摄像头初始化
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QVGA)
sensor.set_vflip(True) #摄像头后置
sensor.skip_frames(time = 1000)
clock = time.clock()
od_img = image.Image(size=(320,256))
#构建KPU对象
kpu = KPU()
kpu.load_kmodel("/sd/yolo_face_detect.kmodel") #加载KPU模型,放在SD卡根目录
#kpu.load_kmodel(0x300000, 278440) #需要将kmdel通过固件下载工具下载到0x300000的位置(3M偏移)
anchor = (0.893, 1.463, 0.245, 0.389, 1.55, 2.58, 0.375, 0.594, 3.099, 5.038, 0.057, 0.090, 0.567, 0.904, 0.101, 0.160, 0.159, 0.255)
kpu.init_yolo2(anchor, anchor_num=9, img_w=320, img_h=240, net_w=320 , net_h=256 ,layer_w=10 ,layer_h=8, threshold=0.7, nms_value=0.3, classes=1)
while True:
#print("mem free:",gc.mem_free()) #查询内存余量
clock.tick()
img = sensor.snapshot()
a = od_img.draw_image(img, 0,0)
od_img.pix_to_ai()
#将摄像头采集图片输送到KPU和yolo模型运算。
kpu.run_with_output(od_img)
dect = kpu.regionlayer_yolo2()
fps = clock.fps()
if len(dect) > 0: #识别到人脸
print("dect:",dect)
for l in dect : #画矩形
a = img.draw_rectangle(l[0],l[1],l[2],l[3], color=(0, 255, 0))
a = img.draw_string(0, 0, "%2.1ffps" %(fps), color=(0, 60, 128), scale=2.0) #显示屏显示FPS
lcd.display(img)
gc.collect()#内存回收
kpu.deinit()

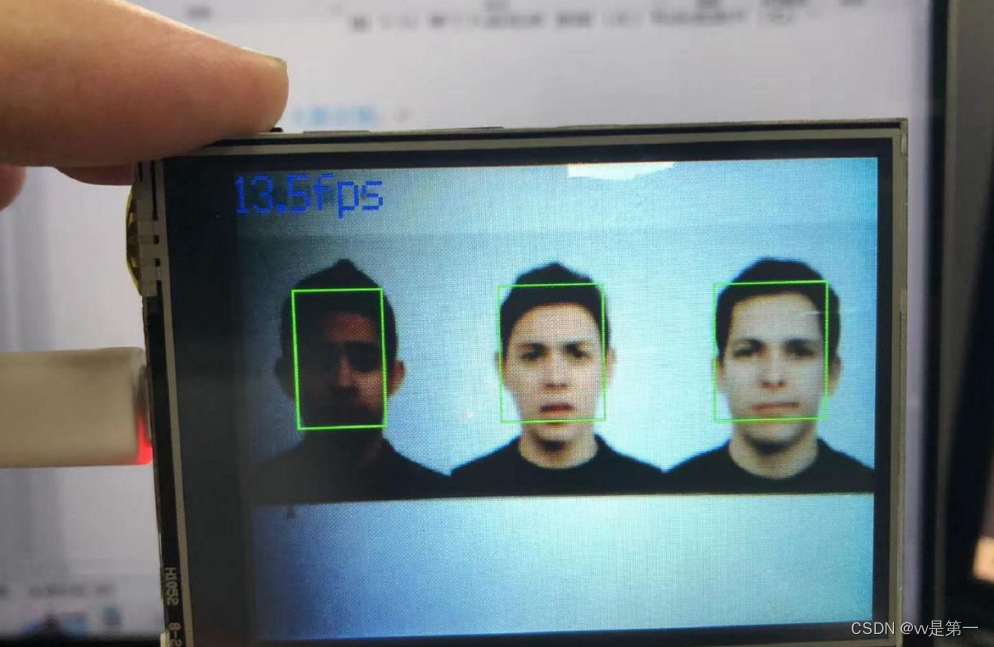 并且可在串口终端看见人脸位置。可用于面容跟踪
并且可在串口终端看见人脸位置。可用于面容跟踪
2:人手识别
#实验名称:人手检测
#翻译和注释:01Studio
#导入相关模块
import sensor, image, time, lcd
from maix import KPU
import gc
lcd.init()
sensor.reset() # Reset and initialize the sensor. It will
# run automatically, call sensor.run(0) to stop
sensor.set_pixformat(sensor.RGB565) # Set pixel format to RGB565 (or GRAYSCALE)
sensor.set_framesize(sensor.QVGA) # Set frame size to QVGA (320x240)
sensor.set_vflip(True) #摄像头后置
sensor.skip_frames(time = 1000) # Wait for settings take effect.
clock = time.clock() # Create a clock object to track the FPS.
od_img = image.Image(size=(320,256))
#构建KPU对象
anchor = (0.8125, 0.4556, 1.1328, 1.2667, 1.8594, 1.4889, 1.4844, 2.2000, 2.6484, 2.9333)
kpu = KPU()
print("ready load model")
#加载KPU模型,放在SD卡根目录
kpu.load_kmodel("/sd/hand_detect.kmodel")
#需要将kmdel通过固件下载工具下载到0x300000的位置(3M偏移)
#kpu.load_kmodel(0x300000, 1438888)
kpu.init_yolo2(anchor, anchor_num=5, img_w=320, img_h=240, net_w=320 , net_h=256 ,layer_w=10 ,layer_h=8, threshold=0.7, nms_value=0.3, classes=1)
while True:
gc.collect()
clock.tick() # Update the FPS clock.
img = sensor.snapshot()
a = od_img.draw_image(img, 0,0)
od_img.pix_to_ai()
#将摄像头采集图片输送到KPU和yolo模型运算。
kpu.run_with_output(od_img)
dect = kpu.regionlayer_yolo2()
fps = clock.fps()
if len(dect) > 0: #识别到人手
print("dect:",dect)
for l in dect :#画矩形
a = img.draw_rectangle(l[0],l[1],l[2],l[3], color=(0, 255, 0))
a = img.draw_string(0, 0, "%2.1ffps" %(fps), color=(0, 60, 128), scale=2.0)
lcd.display(img)
kpu.deinit()

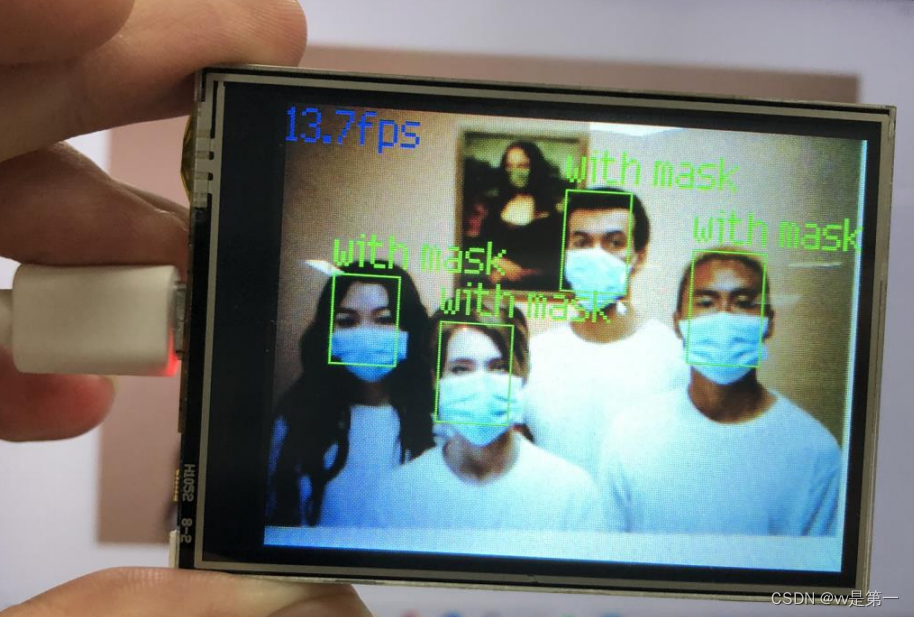
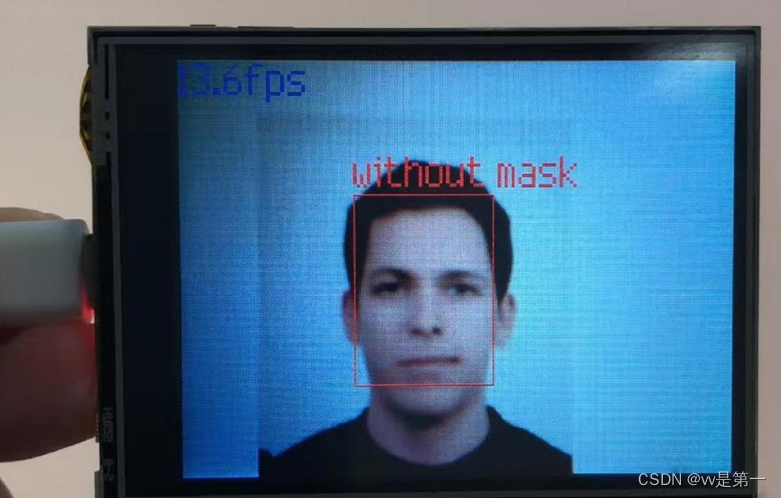
3:口罩识别
#实验名称:口罩检测
#翻译和注释:01Studio
#导入相关模块
import sensor, image, time, lcd
from maix import KPU
import gc
lcd.init()
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QVGA)
sensor.set_vflip(True) #摄像头后置
sensor.skip_frames(time = 1000)
clock = time.clock()
od_img = image.Image(size=(320,256), copy_to_fb=False)
#构建KPU对象
anchor = (0.156250, 0.222548, 0.361328, 0.489583, 0.781250, 0.983133, 1.621094, 1.964286, 3.574219, 3.94000)
kpu = KPU()
print("ready load model")
#加载KPU模型,放在SD卡根目录
kpu.load_kmodel("/sd/detect_5.kmodel")
#需要将kmdel通过固件下载工具下载到0x300000的位置(3M偏移)
#kpu.load_kmodel(0x300000, 555176)
kpu.init_yolo2(anchor, anchor_num=5, img_w=320, img_h=240, net_w=320 , net_h=256 ,layer_w=10 ,layer_h=8, threshold=0.7, nms_value=0.4, classes=2)
while True:
#print("mem free:",gc.mem_free())
clock.tick() # Update the FPS clock.
img = sensor.snapshot()
a = od_img.draw_image(img, 0,0)
od_img.pix_to_ai()
#将摄像头采集图片输送到KPU和yolo模型运算。
kpu.run_with_output(od_img)
dect = kpu.regionlayer_yolo2()
fps = clock.fps()
if len(dect) > 0: #识别到人脸
print("dect:",dect)
for l in dect :
if l[4] : #有带口罩
a = img.draw_rectangle(l[0],l[1],l[2],l[3], color=(0, 255, 0))
a = img.draw_string(l[0],l[1]-24, "with mask", color=(0, 255, 0), scale=2)
else: #没有戴口罩
a = img.draw_rectangle(l[0],l[1],l[2],l[3], color=(255, 0, 0))
a = img.draw_string(l[0],l[1]-24, "without mask", color=(255, 0, 0), scale=2)
a = img.draw_string(0, 0, "%2.1ffps" %(fps), color=(0, 60, 128), scale=2.0)
lcd.display(img)
gc.collect()
kpu.deinit()
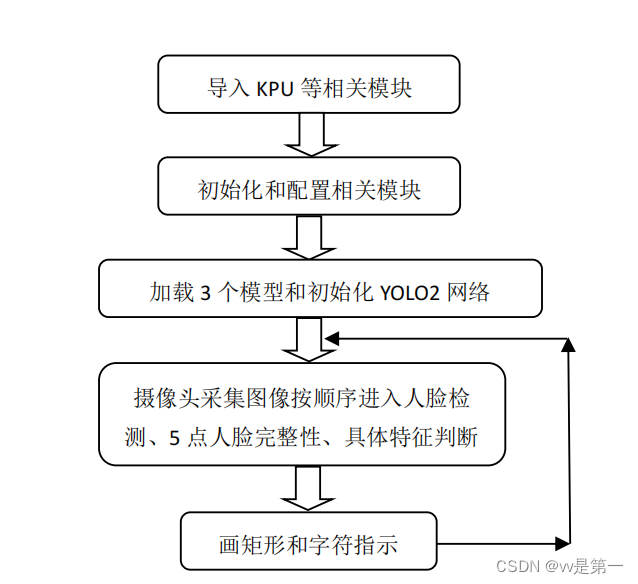
4:人脸特征
实验讲解:
本实验还是使用到
KPU + YOLO2
网络,与前面的区别是这次实验共使用了
3
模型来识别。分别是人脸检测模型、
5
点人脸识别(确认人脸完整性)和人脸具
体特征模型。层层递进。】
具体编程思路如下:
#实验名称:人脸特征
#翻译和注释:01Studio
#导入相关模块
import sensor, image, time, lcd
from maix import KPU
import gc
lcd.init()
sensor.reset() # Reset and initialize the sensor. It will
# run automatically, call sensor.run(0) to stop
sensor.set_pixformat(sensor.RGB565) # Set pixel format to RGB565 (or GRAYSCALE)
sensor.set_framesize(sensor.QVGA) # Set frame size to QVGA (320x240)
sensor.skip_frames(time = 1000) # Wait for settings take effect.
sensor.set_vflip(1) #摄像头后置模式
clock = time.clock() # Create a clock object to track the FPS.
#构建KPU对象和配置模型参数信息
#导入3个模型,放在SD卡根目录
anchor = (0.1075, 0.126875, 0.126875, 0.175, 0.1465625, 0.2246875, 0.1953125, 0.25375, 0.2440625, 0.351875, 0.341875, 0.4721875, 0.5078125, 0.6696875, 0.8984375, 1.099687, 2.129062, 2.425937)
kpu = KPU()
kpu.load_kmodel("/sd/face_detect_320x240.kmodel")
kpu.init_yolo2(anchor, anchor_num=9, img_w=320, img_h=240, net_w=320 , net_h=240 ,layer_w=10 ,layer_h=8, threshold=0.5, nms_value=0.2, classes=1)
ld5_kpu = KPU()
print("ready load model")
ld5_kpu.load_kmodel("/sd/ld5.kmodel")
fac_kpu = KPU()
print("ready load model")
fac_kpu.load_kmodel("/sd/fac.kmodel")
#人脸特征:性别、嘴巴是否张开、是否笑、是否戴眼镜 4个特征
pos_face_attr = ["Male ", "Mouth Open ", "Smiling ", "Glasses"]
neg_face_attr = ["Female ", "Mouth Closed", "No Smile", "No Glasses"]
# standard face key point position
FACE_PIC_SIZE = 128
dst_point =[(int(38.2946 * FACE_PIC_SIZE / 112), int(51.6963 * FACE_PIC_SIZE / 112)),
(int(73.5318 * FACE_PIC_SIZE / 112), int(51.5014 * FACE_PIC_SIZE / 112)),
(int(56.0252 * FACE_PIC_SIZE / 112), int(71.7366 * FACE_PIC_SIZE / 112)),
(int(41.5493 * FACE_PIC_SIZE / 112), int(92.3655 * FACE_PIC_SIZE / 112)),
(int(70.7299 * FACE_PIC_SIZE / 112), int(92.2041 * FACE_PIC_SIZE / 112)) ]
RATIO = 0.08
def extend_box(x, y, w, h, scale):
x1_t = x - scale*w
x2_t = x + w + scale*w
y1_t = y - scale*h
y2_t = y + h + scale*h
x1 = int(x1_t) if x1_t>1 else 1
x2 = int(x2_t) if x2_t<320 else 319
y1 = int(y1_t) if y1_t>1 else 1
y2 = int(y2_t) if y2_t<240 else 239
cut_img_w = x2-x1+1
cut_img_h = y2-y1+1
return x1, y1, cut_img_w, cut_img_h
while 1:
gc.collect()
#print("mem free:",gc.mem_free())
clock.tick() # Update the FPS clock.
img = sensor.snapshot()
kpu.run_with_output(img)
dect = kpu.regionlayer_yolo2()
fps = clock.fps()
#识别出人脸
if len(dect) > 0:
print("dect:",dect)
for l in dect :
x1, y1, cut_img_w, cut_img_h = extend_box(l[0], l[1], l[2], l[3], scale=RATIO) # 扩大人脸框
face_cut = img.cut(x1, y1, cut_img_w, cut_img_h)
a = img.draw_rectangle(l[0],l[1],l[2],l[3], color=(0, 255, 0))
face_cut_128 = face_cut.resize(128, 128)
face_cut_128.pix_to_ai()
#五点人脸识别确认人脸完整
out = ld5_kpu.run_with_output(face_cut_128, getlist=True)
#print("out:",len(out))
face_key_point = []
for j in range(5):
x = int(KPU.sigmoid(out[2 * j])*cut_img_w + x1)
y = int(KPU.sigmoid(out[2 * j + 1])*cut_img_h + y1)
a = img.draw_cross(x, y, size=5, color=(0, 0, 255))
face_key_point.append((x,y))
T = image.get_affine_transform(face_key_point, dst_point)
a = image.warp_affine_ai(img, face_cut_128, T)
# face_cut_128.ai_to_pix()
# img.draw_image(face_cut_128, 0,0)
out2 = fac_kpu.run_with_output(face_cut_128, getlist=True)
del face_key_point
#判断特征数据
if out2 is not None:
for i in range(4):
th = KPU.sigmoid(out2[i])
if th >= 0.7:
a = img.draw_string(l[0]+l[2], l[1]+i*16, "%s" %(pos_face_attr[i]), color=(255, 0, 0), scale=1.5)
else:
a = img.draw_string(l[0]+l[2], l[1]+i*16, "%s" %(neg_face_attr[i]), color=(0, 0, 255), scale=1.5)
del (face_cut_128)
del (face_cut)
a = img.draw_string(0, 0, "%2.1ffps" %(fps), color=(0, 60, 255), scale=2.0)
lcd.display(img)
kpu.deinit()
ld5_kpu.deinit()
fac_kpu.deinit()

总结:
本节学习了人脸特征识别,可以看到
CanMV K210
通过
KPU+YOLO2+
模型轻
松实现识别,而且检测的准确率非常高,也就是结合
MicroPython
编程我们轻松
完成了实验
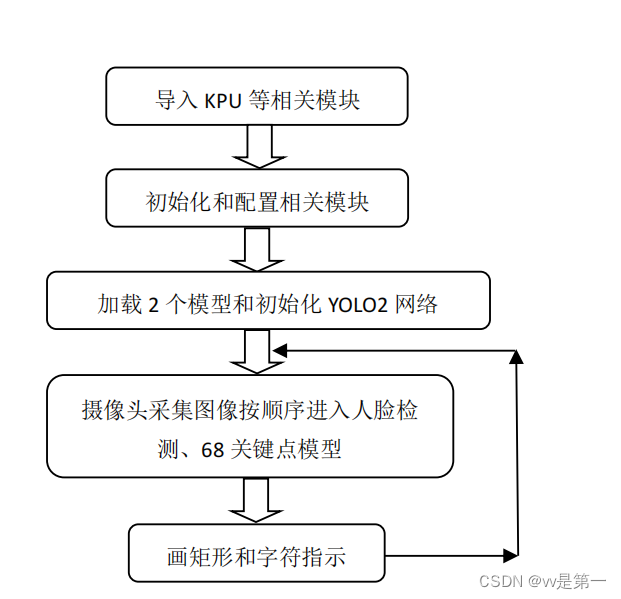
5:68关键点
实验讲解:
本实验还是使用到
KPU + YOLO2
网络,这次实验共使用了
2
模型来识别。分
别是人脸检测模型和人脸 68 个关键点模型。层层递进,具体编程思路如下:
#实验名称:人脸检测_68关键点
#翻译和注释:01Studio
#导入相关模块
import sensor, image, time, lcd
from maix import KPU
import gc
lcd.init()
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QVGA)
sensor.set_vflip(True) #摄像头后置
sensor.skip_frames(time = 500)
clock = time.clock()
od_img = image.Image(size=(320,256), copy_to_fb=False)
#构建KPU对象
#需要导入2个模型,分别是人脸检测模型和68关键点检测模型
anchor = (0.893, 1.463, 0.245, 0.389, 1.55, 2.58, 0.375, 0.594, 3.099, 5.038, 0.057, 0.090, 0.567, 0.904, 0.101, 0.160, 0.159, 0.255)
kpu = KPU()
print("ready load model")
kpu.load_kmodel("/sd/face_detect.kmodel")
kpu.init_yolo2(anchor, anchor_num=9, img_w=320, img_h=240, net_w=320 , net_h=256 ,layer_w=10 ,layer_h=8, threshold=0.7, nms_value=0.2, classes=1)
lm68_kpu = KPU()
print("ready load model")
lm68_kpu.load_kmodel("/sd/landmark68.kmodel")
RATIO = 0.08
while 1:
gc.collect()
#print("mem free:",gc.mem_free())
clock.tick() # Update the FPS clock.
img = sensor.snapshot()
a = od_img.draw_image(img, 0,0)
od_img.pix_to_ai()
kpu.run_with_output(od_img)
dect = kpu.regionlayer_yolo2()
fps = clock.fps()
#识别到人脸
if len(dect) > 0:
print("dect:",dect)
for l in dect :
a = img.draw_rectangle(l[0],l[1],l[2],l[3], color=(0, 255, 0))
x1_t = l[0] - RATIO*l[2]
x2_t = l[0]+l[2] + RATIO*l[2]
y1_t = l[1] - RATIO*l[3]
y2_t = l[1]+l[3] + RATIO*l[3]
x1 = int(x1_t) if x1_t>1 else 1
x2 = int(x2_t) if x2_t<320 else 319
y1 = int(y1_t) if y1_t>1 else 1
y2 = int(y2_t) if y2_t<256 else 255
cut_img_w = x2-x1+1
cut_img_h = y2-y1+1
#print("cut img ",x1, y1, cut_img_w, cut_img_h)
face_cut = img.cut(x1,y1,cut_img_w,cut_img_h)
face_cut_128 = face_cut.resize(128, 128)
face_cut_128.pix_to_ai()
#识别68个关键点
out = lm68_kpu.run_with_output(face_cut_128, getlist=True)
if out is not None:
#print("out:",len(out))
for j in range(68):
x = int(KPU.sigmoid(out[2 * j])*cut_img_w + x1)
y = int(KPU.sigmoid(out[2 * j + 1])*cut_img_h + y1)
#a = img.draw_cross(x, y, size=1, color=(0, 0, 255))
a = img.draw_circle(x, y, 2, color=(0, 0, 255), fill=True)
del (face_cut_128)
del (face_cut)
a = img.draw_string(0, 0, "%2.1ffps" %(fps), color=(0, 60, 255), scale=2.0)
lcd.display(img)
gc.collect()
kpu.deinit()
lm68_kpu.deinit()

初步视觉使用介绍就到此结束了,拜拜