大家好,今天主要和大家聊一聊,如何利用linux系统中的串口驱动。
目录
第一:linux系统中UART驱动框架
第二:uart_ops的具体实现
第三:串口驱动设备树的添加
第一:linux系统中UART驱动框架
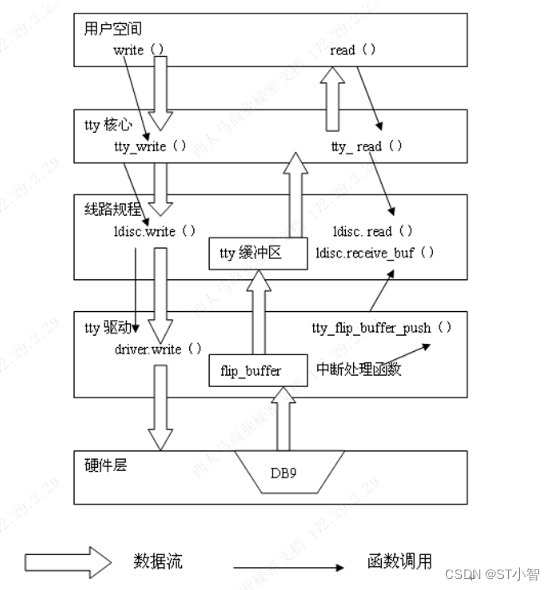
向SPI一样,Linux系统也提供了串口驱动框架,我们需要按照相应的串口框架编写驱动程序即可。串口驱动没有主机端和设备端之分,就只有一个串口驱动,我们真正要做的就是在设备数中添加所要使用的串口节点信息。当系统启动以后串口和设备匹配成功,相应的串口就会被驱动起来,生成/dev/ttymxcX文件。
//串口驱动框架还是需要知道的
struct uart_driver{
struct module *owner; //模块所属者
const char *drvier_name; //驱动名字
const char *dev_name; //设备名字
int major; //主设备号
int minor; //此设备号
int nr; //设备树
struct consle *cons; //控制台
struct uart_state *state;
struct tty_driver *tty_driver;
};
//串口驱动要定义uart_driver,向系统中注册这个uart_driver
int uart_register_driver(struct uart_driver *drv)第二:uart_ops的具体实现
uart_port中的ops成员变量很重要,因为ops包含了针对UART具体的驱动函数,Linux系统收发数据最终调用的都是ops中的函数。ops是uart_ops类型的结构体指针变量。
struct uart_ops{
unsigned int (*tx_empty)(struct uart_port *);
void (*stop_tx)(struct uart_port *);
};第三:串口驱动设备树的添加
大部分的UART已经编写好了,我们要做的就是在设备树中添加UART3对应的设备节点即可。
//UART3对应的pinctl子节点
pinctrl_uart3: uart3grp {
fsl,pins = <
MX6UL_PAD_UART3_TX_DATA__UART3_DCE_TX 0X1b0b1
MX6UL_PAD_UART3_RX_DATA__UART3_DCE_RX 0X1b0b1
>;
};
uart1是UART1,默认在板子上使用到的外设功能,然后加上UART3对应的uart3节点的内容如下:
&uart3{
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_uart3>;
status = "okay";
};总结:完成以后重新编译设备树启动对应的Linux,系统启动以后会生产一个为"/dev/ttymxc2"的设备文件。可以通过访问ttymxc2来实现对UART3的操作。