摘要:本期内容为3D点云目标获取的延续工作,在距离、速度、方位角估计的基础上,通过设计L型阵列结构,进一步实现目标俯仰角的估计,最终实现目标4-D点云的获取。首先,通过中频信号建立仿真信号模型,并设计1发N收的L型阵列结构接收目标回波信号;通过对回波信号进行相应的信号处理,最终获得目标的4-D点云。
1.L型阵列
有关于信号建模的方法,各位读者可以回顾博主往期3D点云的内容。如图1所示为L形阵列的阵列结构,有M+N-1个阵元。此L型阵列由x轴上阵元数为N的均匀线阵和y轴上阵元数为M的均匀线阵构成,阵列间距为d。假设空间有K个信源照射到此阵上。其二维波达方向为(θk,ϕk),k = 1,2,3,…,K,其中,θk和ϕk分别表示第k个信源的俯仰角和方位角。


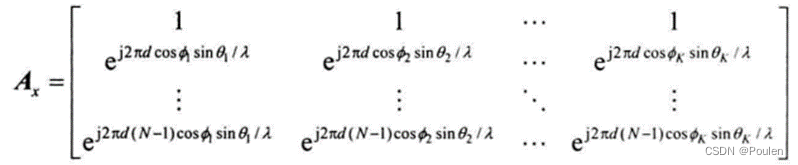
假设入射到此阵列上的信源数为K,则x轴上N个阵元对应的导向矩阵为
y轴上M个阵元对应的导向矩阵为

根据上述的导向矩阵,我们在建立信号模型时,首先需要预先确定Nx和Ny的天线数量,其次就是根据不同的接收天线之间依次加入对应的导向信息,因此信号建模代码如下:
for frameid = 1 : numframe
for rxid = 1 : numrx - 1
for chirpid = 1 : numchirp
for targetid = 1 : numtarget
for sampleid = 1 : numsamples
R = target(targetid,1) + ((chirpid-1)*T)*target(targetid,2) + (frameid-1)*numchirp*T*target(targetid,2); %计算目标随速度变化的距离,以忽略快时间对距离的影响
delay = 2 * R / parameter.c;
fixphase = exp(1j*2*pi*(f0*delay-0.5*slope*delay^2)); %中频信号的固定相位,末尾的相位为剩余视频相位,为了更真实还原毫米波雷达数据,本程中没有将其省略
fastsampdata(sampleid) = abs(randn)^2 * exp(1j*2*pi*slope*delay*t(sampleid)) * fixphase; %这里采用随机起伏
end
%用来判断不同的天线间
if(rxid <= Nx)
azimuthphase = exp(1j*(2*pi/lambda)*cosd(target(targetid,3))*sind(target(targetid,4)) *(rxid -1) * Detarx); %目标方位角信息
else
azimuthphase = exp(1j*(2*pi/lambda)*sind(target(targetid,3))*sind(target(targetid,4)) *(rxid - Nx) * Detarx); %目标方位角信息
end
rawdata(:,chirpid,rxid,frameid) = rawdata(:,chirpid,rxid,frameid) + fastsampdata.* azimuthphase;
end
end
%加入高斯噪声
MixIQ = rawdata(:,:,rxid,frameid);
xigema = std(MixIQ)/db2mag(snr);
MixIQ = MixIQ + ((randn(size(MixIQ)) + 1i*randn(size(MixIQ)))).*xigema;
rawdata(:,:,rxid,frameid) = MixIQ;
end
end信号时域图如下:


2.FMCW 4D点云仿真
仿真环境:Matlab2021b,windows 11
阵列结构:L型阵列,设置1发20收。其中Nx = 12,Ny = 8;
目标设置:3个目标。(10 , -2.2 , 30, 24)、(5, 4.4 , -15, 46)、(22, 3.5 , 20 , 61)从左到右依次表征目标的距离、速度、方位角和俯仰角。
系统参数:最大探测距离=30m;距离分辨率=0.06m;最大不模糊速度=7.93m/s;速度分辨率=0.12m/s;
仿真效果如下:

根据图3目标的距离多普勒图可以很明显的得到目标的距离和速度信息,为了进一步检测目标,采用CFAR恒虚警目标检测技术对距离多普勒结果进行检测得:
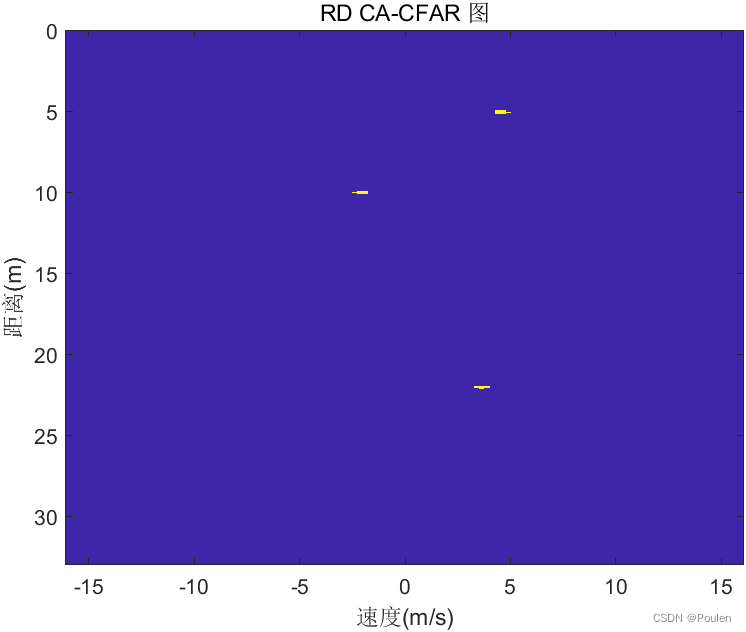
从根据图4CFAR的输出结果,我们通过峰值搜索的方法即可提取目标距离和速度所在的索引,即完成自动检测的目的。为了获得目标的方位角和俯仰角的信息,我们将将距离多普勒结果作为输入,采用2维MUSIC算法进行DOA估计,估计结果为:


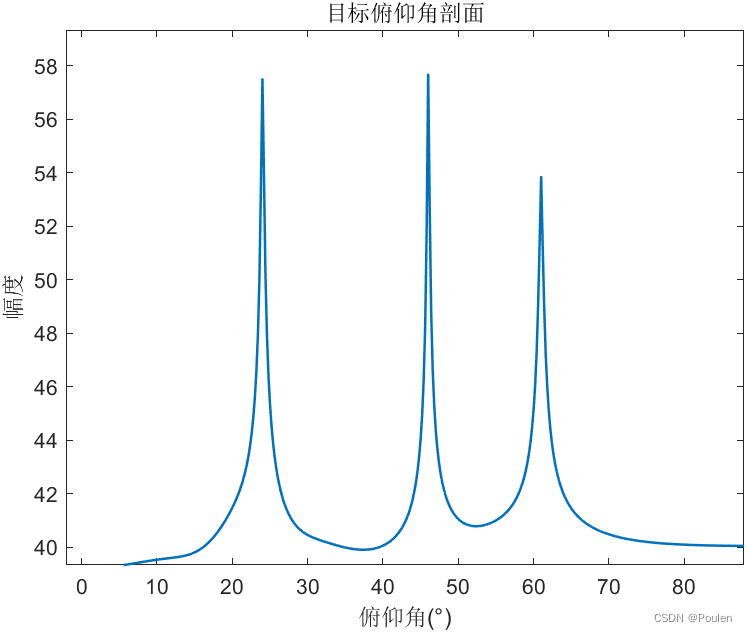
根据图5和图6,可以得出,无论是方位-俯仰联合分布,或各自的剖面信息,都很清晰的表征了目标的方位-俯仰信息,我们根据各自的剖面信息,分别分离提取并关联,最终得到目标的4-D点云,通过控制输出4-D点云列表,如下:
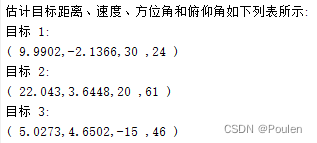
从点云列表我们可以得知,与最初设置的目标信息相差不大,足以证明我们方法的有效性。
3 总结
本期内容主要是对3D点云的补充部分,希望对大家有所帮助,另外创作不易,感谢支持!
仿真代码链接:FMCW雷达4-D点云仿真源代码