一、根据点跟角度计算另一点坐标(三维球体)
export const getAnotherPoint = (lon: number, lat: number, angle: number, distance: number) => {
// WGS84坐标系
var a = 6378137; // 赤道半径
var b = 6356752.3142; // 短半径
var f = 1 / 298.257223563; // 扁率
var alpha1 = angle * (Math.PI / 180)
var sinAlpha1 = Math.sin(alpha1);
var cosAlpha1 = Math.cos(alpha1);
var tanU1 = (1 - f) * Math.tan(lat * (Math.PI / 180));
var cosU1 = 1 / Math.sqrt((1 + tanU1 * tanU1)), sinU1 = tanU1 * cosU1;
var sigma1 = Math.atan2(tanU1, cosAlpha1);
var sinAlpha = cosU1 * sinAlpha1;
var cosSqAlpha = 1 - sinAlpha * sinAlpha;
var uSq = cosSqAlpha * (a * a - b * b) / (b * b);
var A = 1 + uSq / 16384 * (4096 + uSq * (-768 + uSq * (320 - 175 * uSq)));
var B = uSq / 1024 * (256 + uSq * (-128 + uSq * (74 - 47 * uSq)));
var sigma = distance / (b * A), sigmaP = 2 * Math.PI;
let sinSigma = 0
let cosSigma = 0
let cos2SigmaM = 0
while (Math.abs(sigma - sigmaP) > 1e-12) {
cos2SigmaM = Math.cos(2 * sigma1 + sigma);
sinSigma = Math.sin(sigma);
cosSigma = Math.cos(sigma);
var deltaSigma = B * sinSigma * (cos2SigmaM + B / 4 * (cosSigma * (-1 + 2 * cos2SigmaM * cos2SigmaM) -
B / 6 * cos2SigmaM * (-3 + 4 * sinSigma * sinSigma) * (-3 + 4 * cos2SigmaM * cos2SigmaM)));
sigmaP = sigma;
sigma = distance / (b * A) + deltaSigma;
}
var tmp = sinU1 * sinSigma - cosU1 * cosSigma * cosAlpha1;
var lat2 = Math.atan2(sinU1 * cosSigma + cosU1 * sinSigma * cosAlpha1,
(1 - f) * Math.sqrt(sinAlpha * sinAlpha + tmp * tmp));
var lambda = Math.atan2(sinSigma * sinAlpha1, cosU1 * cosSigma - sinU1 * sinSigma * cosAlpha1);
var C = f / 16 * cosSqAlpha * (4 + f * (4 - 3 * cosSqAlpha));
var L = lambda - (1 - C) * f * sinAlpha *
(sigma + C * sinSigma * (cos2SigmaM + C * cosSigma * (-1 + 2 * cos2SigmaM * cos2SigmaM)));
return { lon: Number(lon) + L * (180 / Math.PI), lat: lat2 * (180 / Math.PI) };
}
二、渐变材质
export const getMaterial = () => {
let appearance = new Cesium.MaterialAppearance({
vertexShaderSource: `
attribute vec3 position3DHigh;
attribute vec3 position3DLow;
attribute float batchId;
varying vec4 v_positionEC;
attribute vec4 color;
varying vec4 v_color;
void main(){
v_color = color;
vec4 p = czm_computePosition(); // 获取模型相对于视点位置
vec4 eyePosition = czm_modelViewRelativeToEye * p; // 由模型坐标 得到视点坐标
v_positionEC = czm_inverseModelView * eyePosition; // 视点在 模型坐标系中的位置
gl_Position = czm_modelViewProjectionRelativeToEye * p; // 视点坐标转为屏幕坐标
}`,
fragmentShaderSource: `
varying vec4 v_positionEC;
varying vec3 v_normalEC;
varying vec4 v_color;
void main() {
float l = sqrt(pow(v_positionEC.x,2.0) + pow(v_positionEC.y,2.0) + pow(v_positionEC.z,2.0)); // 距离模型坐标系原点的距离
float cy3 = fract((abs(l-27.0))/40.0);
// 修改渐变方向 float cy3 = 1- fract((abs(l-27.0))/40.0);
gl_FragColor = vec4(v_color.rgb,cy3);
}
`,
})
return appearance
}
三、根据两点坐标获取偏航角和俯仰角
function getHeadingPitch(fromPosition, toPosition) {
let finalPosition = new Cesium.Cartesian3();
let matrix4 = Cesium.Transforms.eastNorthUpToFixedFrame(fromPosition);
Cesium.Matrix4.inverse(matrix4, matrix4);
Cesium.Matrix4.multiplyByPoint(matrix4, toPosition, finalPosition);
Cesium.Cartesian3.normalize(finalPosition, finalPosition);
const resultHead = Cesium.Math.toDegrees(Math.atan2(finalPosition.x, finalPosition.y))
const resultPitch = Cesium.Math.toDegrees(Math.asin(finalPosition.z))
return {resultHead ,resultPitch };
}
四、添加实体
(一)点
//entities.add(entity)
viewer.entities.add({
// fromDegrees(经度,纬度,高度,椭球,结果)从以度为单位的经度和纬度值返回Cartesian3位置
position: Cesium.Cartesian3.fromDegrees(108, 34, 10),
point: {
// 点的大小(像素)
pixelSize: 5,
// 点位颜色,fromCssColorString 可以直接使用CSS颜色
color: Cesium.Color.fromCssColorString('#ee0000'),
// 边框颜色
outlineColor: Cesium.Color.fromCssColorString('#fff'),
// 边框宽度(像素)
outlineWidth: 2,
// 显示在距相机的距离处的属性,多少区间内是可以显示的
distanceDisplayCondition: new Cesium.DistanceDisplayCondition(0, 1500),
// 是否显示
show: true
}
});
(二)线
viewer.entities.add({
polyline: {
// fromDegrees返回给定的经度和纬度值数组(以度为单位),该数组由Cartesian3位置组成。
// Cesium.Cartesian3.fromDegreesArray([经度1, 纬度1, 经度2, 纬度2,])
// Cesium.Cartesian3.fromDegreesArrayHeights([经度1, 纬度1, 高度1, 经度2, 纬度2, 高度2])
positions: Cesium.Cartesian3.fromDegreesArray([
120.9677706, 30.7985748,
110.20, 34.55
]),
// 宽度
width: 2,
// 线的颜色
material: Cesium.Color.WHITE,
// 线的顺序,仅当`clampToGround`为true并且支持地形上的折线时才有效。
zIndex: 10,
// 显示在距相机的距离处的属性,多少区间内是可以显示的
distanceDisplayCondition: new Cesium.DistanceDisplayCondition(0, 1500),
// 是否显示
show: true
}
});
(三)面
viewer.entities.add({
polygon: {
// 获取指定属性(positions,holes(图形内需要挖空的区域))
hierarchy: {
positions: Cesium.Cartesian3.fromDegreesArray([
120.9677706, 30.7985748,
110.20, 34.55,
120.20, 50.55
]),
holes: [{
positions: Cesium.Cartesian3.fromDegreesArray([
119, 32,
115, 34,
119, 40
])
}]
},
// 边框
outline: true,
// 边框颜色
outlineColor: Cesium.Color.WHITE,
// 边框尺寸
outlineWidth: 2,
// 填充的颜色,withAlpha透明度
material: Cesium.Color.GREEN.withAlpha(0.5),
// 是否被提供的材质填充
fill: true,
// 恒定高度
height: 5000,
// 显示在距相机的距离处的属性,多少区间内是可以显示的
distanceDisplayCondition: new Cesium.DistanceDisplayCondition(1000, 10000000),
// 是否显示
show: true,
// 顺序,仅当`clampToGround`为true并且支持地形上的折线时才有效。
zIndex: 10
}
});
(四)文字
viewer.entities.add({
position: Cesium.Cartesian3.fromDegrees(120, 30, 5),
// 点
point: {
color: Cesium.Color.RED, // 点位颜色
pixelSize: 10 // 像素点大小
},
// 文字
label: {
// 文本。支持显式换行符“ \ n”
text: '测试名称',
// 字体样式,以CSS语法指定字体
font: '14pt Source Han Sans CN',
// 字体颜色
fillColor: Cesium.Color.BLACK,
// 背景颜色
backgroundColor: Cesium.Color.AQUA,
// 是否显示背景颜色
showBackground: true,
// 字体边框
outline: true,
// 字体边框颜色
outlineColor: Cesium.Color.WHITE,
// 字体边框尺寸
outlineWidth: 10,
// 应用于图像的统一比例。比例大于会1.0放大标签,而比例小于会1.0缩小标签。
scale: 1.0,
// 设置样式:FILL:填写标签的文本,但不要勾勒轮廓;OUTLINE:概述标签的文本,但不要填写;FILL_AND_OUTLINE:填写并概述标签文本。
style: Cesium.LabelStyle.FILL_AND_OUTLINE,
// 相对于坐标的水平位置
verticalOrigin: Cesium.VerticalOrigin.CENTER,
// 相对于坐标的水平位置
horizontalOrigin: Cesium.HorizontalOrigin.LEFT,
// 该属性指定标签在屏幕空间中距此标签原点的像素偏移量
pixelOffset: new Cesium.Cartesian2(10, 0),
// 显示在距相机的距离处的属性,多少区间内是可以显示的
distanceDisplayCondition: new Cesium.DistanceDisplayCondition(0, 1500),
// 是否显示
show: true
}
});
(五)广告牌(图片)
viewer.entities.add({
position: Cesium.Cartesian3.fromDegrees(110.20, 34.55, 2.61),
billboard: {
// 图像地址,URI或Canvas的属性
image: '/location.png',
// 设置颜色和透明度
color: Cesium.Color.WHITE.withAlpha(0.8),
// 高度(以像素为单位)
height: 50,
// 宽度(以像素为单位)
width: 50,
// 逆时针旋转
rotation: 20,
// 大小是否以米为单位
sizeInMeters: false,
// 相对于坐标的垂直位置
verticalOrigin: Cesium.VerticalOrigin.CENTER,
// 相对于坐标的水平位置
horizontalOrigin: Cesium.HorizontalOrigin.LEFT,
// 该属性指定标签在屏幕空间中距此标签原点的像素偏移量
pixelOffset: new Cesium.Cartesian2(10, 0),
// 应用于图像的统一比例。比例大于会1.0放大标签,而比例小于会1.0缩小标签。
scale: 1.0,
// 显示在距相机的距离处的属性,多少区间内是可以显示的
distanceDisplayCondition: new Cesium.DistanceDisplayCondition(0, 1500),
// 是否显示
show: true
}
});
(六)模型
viewer.entities.add({
// 设置方向
orientation: orientation,
position: Cesium.Cartesian3.fromDegrees(120, 30, 10000),
model: {
// 引入模型
uri: '/SampleData/models/CesiumAir/Cesium_Air.glb',
// 模型的近似最小像素大小,而不考虑缩放。这可以用来确保即使观看者缩小也可以看到模型。如果为0.0,则不强制使用最小大小
minimumPixelSize: 1280,
// 模型的颜色(与模型的渲染颜色混合的属性)
color: Cesium.Color.WHITE.withAlpha(1),
// 模型的最大比例大小
maximumScale: 20000,
// 设置模型轮廓(边框)颜色
silhouetteColor: Cesium.Color.BLACK,
// 设置模型轮廓(边框)大小
silhouetteSize: 2,
// 是否执行模型动画
runAnimations: true,
// 应用于图像的统一比例。比例大于会1.0放大标签,而比例小于会1.0缩小标签。
scale: 1.0,
// 显示在距相机的距离处的属性,多少区间内是可以显示的
distanceDisplayCondition: new Cesium.DistanceDisplayCondition(0, 1500),
// 是否显示
show: true
}
});
五、添加primitive
(一)点
const pointsDataSource = viewer.scene.primitives.add(new Cesium.PointPrimitiveCollection())
// 创建点
for (const index in points) {
pointsDataSource.add({
pixelSize: 10,
color: Cesium.Color.fromCssColorString('#fff'),
position: Cesium.Cartesian3.fromDegrees(item[0], item[1], item[2]),
});
}
// 销毁点
pointsDataSource?.removeAll();
(二)线
const newArr1 = []; let newArr2 = [];
// eslint-disable-next-line array-callback-return
points.map((item) => {
newArr1.push(item[0]);
newArr1.push(item[1]);
newArr1.push(item[2]);
});
newArr2 = newArr1;
/// map原由fromDegreesArray 所需的数据属于[lon, lat, height, lon, lat, height, ...]
/// 所以需要map改造
/// 创建线
const lineDataSource = viewer.scene.primitives.add(new Cesium.PolylineCollection());
lineDataSource.add({
width: 2,
positions: this.Cesium.Cartesian3.fromDegreesArrayHeights(newArr2),
material: this.Cesium.Material.fromType('Color', {
color: this.Cesium.Color.fromCssColorString('#EADDCA'),
}),
});
/// 销毁线
lineDataSource?.removeAll();
(三)广告牌
billboards.add({
position: Cesium.Cartesian3.fromDegrees(item[0], item[1], item[2]),
image: '图片地址',
// image:pinBuilder.fromColor(Cesium.Color.fromRandom({ alpha: 1.0 }), 20).toDataURL()
width: 18,
height: 18,
verticalOrigin: Cesium.VerticalOrigin.BOTTOM,
})
加载大量贴地广告牌:BillboardCollection
const collection = new Cesium.BillboardCollection({ scene: viewer.scene })
1、heightReference属性
collection.add({
position: position,
image: pinBuilder.fromColor(Cesium.Color.fromRandom({ alpha: 1.0 }), 20).toDataURL(),
verticalOrigin: Cesium.VerticalOrigin.BOTTOM,
horizontalOrigin: Cesium.HorizontalOrigin.CENTER,
heightReference: Cesium.HeightReference.CLAMP_TO_GROUND
})
2、sampleTerrainMostDetailed方法
// 1、生成大量随机点
const points = randomPoint(500, { bbox: [100, 25, 102, 27] })
// 2、Cartographic数组
const positions = []
for (let point of points.features) {
const coordinates = point.geometry.coordinates
const position = Cesium.Cartographic.fromDegrees(coordinates[0], coordinates[1])
positions.push(position)
}
// 3、高程采样
const pinBuilder = new Cesium.PinBuilder();
const collection = new Cesium.BillboardCollection()
const terrainProvider = viewer.terrainProvider
const promise = Cesium.sampleTerrainMostDetailed(terrainProvider, positions);
Promise.resolve(promise).then(function (updatedPositions) {
for (let position of updatedPositions) {
collection.add({
position: Cesium.Cartesian3.fromRadians(position.longitude, position.latitude, position.height),
image: pinBuilder.fromColor(Cesium.Color.fromRandom({ alpha: 1.0 }), 20).toDataURL(),
verticalOrigin: Cesium.VerticalOrigin.BOTTOM,
horizontalOrigin: Cesium.HorizontalOrigin.CENTER,
})
}
viewer.scene.primitives.add(collection)
});
(四)标注
labels.add({
position: Cesium.Cartesian3.fromDegrees(item[0], item[1], item[2]),
text: `文字标注`,
font: '10px sans-serif',
});
(五)几何图形
以折线和多边形为例:
let rectangleInstanceArr = [];
//定义折线几何
let polyline = new Cesium.PolylineGeometry({
positions: Cesium.Cartesian3.fromDegreesArray([
119.7,
30.2,
119.8,
30.2,
119.85,
30.3
]),
width: 10.0,
vertexFormat:Cesium.PolylineColorAppearance.VERTEX_FORMAT
});
//定义多边形几何
// let polygon = new Cesium.PolygonGeometry({
// polygonHierarchy: new Cesium.PolygonHierarchy(
// Cesium.Cartesian3.fromDegreesArray([
// 119.7,
// 30.2,
// 119.8,
// 30.2,
// 119.85,
// 30.3,
// ])
// ),
// vertexFormat: Cesium.PerInstanceColorAppearance.VERTEX_FORMAT,
// });
var rectangleInstance = new Cesium.GeometryInstance({
geometry: polyline,
attributes: {
color: Cesium.ColorGeometryInstanceAttribute.fromColor(
Cesium.Color.RED
),
},
});
rectangleInstanceArr.push(rectangleInstance);
this.viewer.scene.primitives.add(
new Cesium.Primitive({
geometryInstances: rectangleInstanceArr,
//多边形外观
// appearance: new Cesium.PerInstanceColorAppearance({
// translucent: true,
// closed: false,
// }),
//折线外观
appearance:new Cesium.PolylineColorAppearance({
translucent:false
}),
asynchronous: false,
})
);
六、定位
(一)定位到点
1、viewer
let entity = null;
/**
* 视图定位方法,定位到点
* @param lon 经度
* @param lat 纬度
* @param alt 范围(相机距离中心点的位置为5000)
*/
function viewerFlyToLonLat(lon, lat, alt) {
entity && viewer.entities.remove(entity);
entity = new Cesium.Entity({
id: 'flyTojwd',
position: Cesium.Cartesian3.fromDegrees(lon, lat),
point: {
pixelSize: 10,
color: Cesium.Color.WHITE.withAlpha(0.9),
outlineColor: Cesium.Color.WHITE.withAlpha(0.9),
outlineWidth: 1
}
});
viewer.entities.add(entity);
viewer.flyTo(entity, {
offset: {
heading: Cesium.Math.toRadians(0.0), //默认方向为正北,正角度为向东旋转,即水平选装,也叫偏航角
pitch: Cesium.Math.toRadians(-50), // 俯仰角
range: alt
}
});
}
2、camera
/**
* 相机定位方法,定位到点
* @param lon 经度
* @param lat 纬度
* @param alt 范围(相机距离中心点的位置为5000)
*/
function cameraFlyToLonLat(lon, lat, alt) {
viewer.camera.flyTo({
destination: Cesium.Cartesian3.fromDegrees(lon, lat, alt),
orientation: {
heading: Cesium.Math.toRadians(0.0),
pitch: Cesium.Math.toRadians(-25.0),
roll: 0.0
}
});
}
(二)定位到范围
1、viewer
/**
* 视图定位方法,定位到范围
* @param rect 范围数组(最西、最南、最东、最北)
*/
function viewerFlyToRange(rect) {
if (locationRectEntity)
viewer.entities.remove(locationRectEntity);
locationRectEntity = viewer.entities.add({
name: 'locationRectangle',
id: 'locationRectangle',
rectangle: {
coordinates: Cesium.Rectangle.fromDegrees(rect[0], rect[1], rect[2], rect[3]),
material: Cesium.Color.GREEN.withAlpha(1.0),
height: 10.0,
outline: false
}
});
let flyPromise = viewer.flyTo(locationRectEntity, {
duration: 5,
offset: new Cesium.HeadingPitchRange(0.0, Cesium.Math.toRadians(-20.0))
});
}
2、camera
/**
* 相机定位方法,定位到范围
* @param rect 范围数组(最西、最南、最东、最北)
*/
function cameraFlyToRange(rect) {
viewer.camera.flyTo({
destination: Cesium.Rectangle.fromDegrees(rect[0], rect[1], rect[2], rect[3]),
duration: 5,
orientation: {
heading: Cesium.Math.toRadians(0.0),
pitch: Cesium.Math.toRadians(-25.0),
roll: 0.0
}
});
}
七、可视域分析
(一)ShadowMap
阴影贴图:new Cesium.ShadowMap (options)

Cesium用它来实现阴影效果。
ShadowMap的一个比较明显的缺点是阴影边缘锯齿化很严重,而PCF则能有效地克服Shadow Map阴影边缘的锯齿。
(二)Frustum
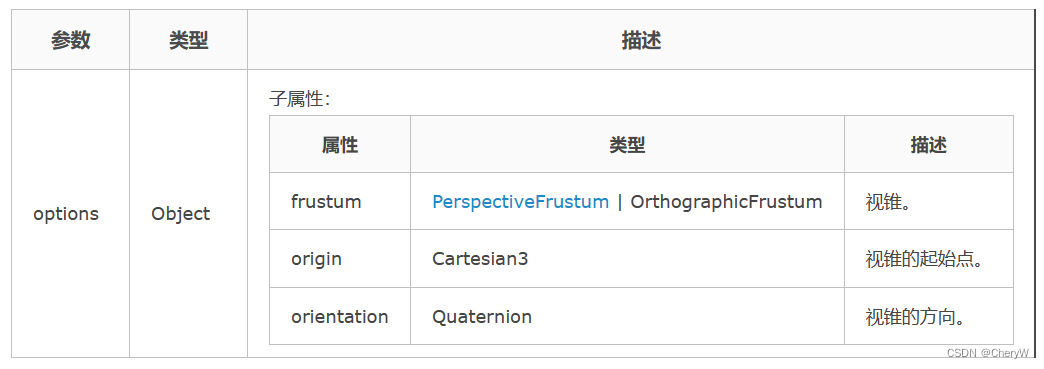
new Cesium.FrustumOutlineGeometry (options):绘制视锥的轮廓线
(三)Camera

给定视锥的起点、向前的方向和向上的方向,把视锥的方向确定下来,设置了视锥的视野角度、宽高比、近平面距离和远平面距离,把视锥的形状确定下来了。
// 创建一个沿负z轴向下的,位于原点的,视野为60度的,宽高比为1:1的相机。
var camera = new Cesium.Camera(scene);
camera.position = new Cesium.Cartesian3();
camera.direction = Cesium.Cartesian3.negate(Cesium.Cartesian3.UNIT_Z, new Cesium.Cartesian3());
camera.up = Cesium.Cartesian3.clone(Cesium.Cartesian3.UNIT_Y);
camera.frustum.fov = Cesium.Math.PI_OVER_THREE;
camera.frustum.near = 1.0;
camera.frustum.far = 2.0;
(四)视网
用EllipsoidGraphics绘制的实体对象。

(五)具体实现
// ViewShed.js
/**
* 可视域分析。
*
* @author Helsing
* @date 2020/08/28
* @alias ViewShedStage
* @class
* @param {Cesium.Viewer} viewer Cesium三维视窗。
* @param {Object} options 选项。
* @param {Cesium.Cartesian3} options.viewPosition 观测点位置。
* @param {Cesium.Cartesian3} options.viewPositionEnd 最远观测点位置(如果设置了观测距离,这个属性可以不设置)。
* @param {Number} options.viewDistance 观测距离(单位`米`,默认值100)。
* @param {Number} options.viewHeading 航向角(单位`度`,默认值0)。
* @param {Number} options.viewPitch 俯仰角(单位`度`,默认值0)。
* @param {Number} options.horizontalViewAngle 可视域水平夹角(单位`度`,默认值90)。
* @param {Number} options.verticalViewAngle 可视域垂直夹角(单位`度`,默认值60)。
* @param {Cesium.Color} options.visibleAreaColor 可视区域颜色(默认值`绿色`)。
* @param {Cesium.Color} options.invisibleAreaColor 不可视区域颜色(默认值`红色`)。
* @param {Boolean} options.enabled 阴影贴图是否可用。
* @param {Boolean} options.softShadows 是否启用柔和阴影。
* @param {Boolean} options.size 每个阴影贴图的大小。
*/
class ViewShedStage {
constructor(viewer, options) {
this.viewer = viewer;
this.viewPosition = options.viewPosition;
this.viewPositionEnd = options.viewPositionEnd;
this.viewDistance = this.viewPositionEnd ? Cesium.Cartesian3.distance(this.viewPosition, this.viewPositionEnd) : (options.viewDistance || 100.0);
this.viewHeading = this.viewPositionEnd ? getHeading(this.viewPosition, this.viewPositionEnd) : (options.viewHeading || 0.0);
this.viewPitch = this.viewPositionEnd ? getPitch(this.viewPosition, this.viewPositionEnd) : (options.viewPitch || 0.0);
this.horizontalViewAngle = options.horizontalViewAngle || 90.0;
this.verticalViewAngle = options.verticalViewAngle || 60.0;
this.visibleAreaColor = options.visibleAreaColor || Cesium.Color.GREEN;
this.invisibleAreaColor = options.invisibleAreaColor || Cesium.Color.RED;
this.enabled = (typeof options.enabled === "boolean") ? options.enabled : true;
this.softShadows = (typeof options.softShadows === "boolean") ? options.softShadows : true;
this.size = options.size || 2048;
this.update();
}
add() {
this.createLightCamera();
this.createShadowMap();
this.createPostStage();
this.drawFrustumOutine();
this.drawSketch();
}
update() {
this.clear();
this.add();
}
clear() {
if (this.sketch) {
this.viewer.entities.removeById(this.sketch.id);
this.sketch = null;
}
if (this.frustumOutline) {
this.frustumOutline.destroy();
this.frustumOutline = null;
}
if (this.postStage) {
this.viewer.scene.postProcessStages.remove(this.postStage);
this.postStage = null;
}
}
}
export default ViewShed;
创建相机:
createLightCamera() {
this.lightCamera = new Cesium.Camera(this.viewer.scene);
this.lightCamera.position = this.viewPosition;
// if (this.viewPositionEnd) {
// let direction = Cesium.Cartesian3.normalize(Cesium.Cartesian3.subtract(this.viewPositionEnd, this.viewPosition, new Cesium.Cartesian3()), new Cesium.Cartesian3());
// this.lightCamera.direction = direction; // direction是相机面向的方向
// }
this.lightCamera.frustum.near = this.viewDistance * 0.001;
this.lightCamera.frustum.far = this.viewDistance;
const hr = Cesium.Math.toRadians(this.horizontalViewAngle);
const vr = Cesium.Math.toRadians(this.verticalViewAngle);
const aspectRatio =
(this.viewDistance * Math.tan(hr / 2) * 2) /
(this.viewDistance * Math.tan(vr / 2) * 2);
this.lightCamera.frustum.aspectRatio = aspectRatio;
if (hr > vr) {
this.lightCamera.frustum.fov = hr;
} else {
this.lightCamera.frustum.fov = vr;
}
this.lightCamera.setView({
destination: this.viewPosition,
orientation: {
heading: Cesium.Math.toRadians(this.viewHeading || 0),
pitch: Cesium.Math.toRadians(this.viewPitch || 0),
roll: 0
}
});
}
创建阴影贴图:
createShadowMap() {
this.shadowMap = new Cesium.ShadowMap({
context: (this.viewer.scene).context,
lightCamera: this.lightCamera,
enabled: this.enabled,
isPointLight: true,
pointLightRadius: this.viewDistance,
cascadesEnabled: false,
size: this.size,
softShadows: this.softShadows,
normalOffset: false,
fromLightSource: false
});
this.viewer.scene.shadowMap = this.shadowMap;
}
创建PostStage:
createPostStage() {
const fs = glsl
const postStage = new Cesium.PostProcessStage({
fragmentShader: fs,
uniforms: {
shadowMap_textureCube: () => {
this.shadowMap.update(Reflect.get(this.viewer.scene, "_frameState"));
return Reflect.get(this.shadowMap, "_shadowMapTexture");
},
shadowMap_matrix: () => {
this.shadowMap.update(Reflect.get(this.viewer.scene, "_frameState"));
return Reflect.get(this.shadowMap, "_shadowMapMatrix");
},
shadowMap_lightPositionEC: () => {
this.shadowMap.update(Reflect.get(this.viewer.scene, "_frameState"));
return Reflect.get(this.shadowMap, "_lightPositionEC");
},
shadowMap_normalOffsetScaleDistanceMaxDistanceAndDarkness: () => {
this.shadowMap.update(Reflect.get(this.viewer.scene, "_frameState"));
const bias = this.shadowMap._pointBias;
return Cesium.Cartesian4.fromElements(
bias.normalOffsetScale,
this.shadowMap._distance,
this.shadowMap.maximumDistance,
0.0,
new Cesium.Cartesian4()
);
},
shadowMap_texelSizeDepthBiasAndNormalShadingSmooth: () => {
this.shadowMap.update(Reflect.get(this.viewer.scene, "_frameState"));
const bias = this.shadowMap._pointBias;
const scratchTexelStepSize = new Cesium.Cartesian2();
const texelStepSize = scratchTexelStepSize;
texelStepSize.x = 1.0 / this.shadowMap._textureSize.x;
texelStepSize.y = 1.0 / this.shadowMap._textureSize.y;
return Cesium.Cartesian4.fromElements(
texelStepSize.x,
texelStepSize.y,
bias.depthBias,
bias.normalShadingSmooth,
new Cesium.Cartesian4()
);
},
camera_projection_matrix: this.lightCamera.frustum.projectionMatrix,
camera_view_matrix: this.lightCamera.viewMatrix,
helsing_viewDistance: () => {
return this.viewDistance;
},
helsing_visibleAreaColor: this.visibleAreaColor,
helsing_invisibleAreaColor: this.invisibleAreaColor,
}
});
this.postStage = this.viewer.scene.postProcessStages.add(postStage);
}
创建视锥线:
drawFrustumOutline() {
const scratchRight = new Cesium.Cartesian3();
const scratchRotation = new Cesium.Matrix3();
const scratchOrientation = new Cesium.Quaternion();
const position = this.lightCamera.positionWC;
const direction = this.lightCamera.directionWC;
const up = this.lightCamera.upWC;
let right = this.lightCamera.rightWC;
right = Cesium.Cartesian3.negate(right, scratchRight);
let rotation = scratchRotation;
Cesium.Matrix3.setColumn(rotation, 0, right, rotation);
Cesium.Matrix3.setColumn(rotation, 1, up, rotation);
Cesium.Matrix3.setColumn(rotation, 2, direction, rotation);
let orientation = Cesium.Quaternion.fromRotationMatrix(rotation, scratchOrientation);
let instance = new Cesium.GeometryInstance({
geometry: new Cesium.FrustumOutlineGeometry({
frustum: this.lightCamera.frustum,
origin: this.viewPosition,
orientation: orientation
}),
id: Math.random().toString(36).substr(2),
attributes: {
color: Cesium.ColorGeometryInstanceAttribute.fromColor(
Cesium.Color.YELLOWGREEN//new Cesium.Color(0.0, 1.0, 0.0, 1.0)
),
show: new Cesium.ShowGeometryInstanceAttribute(true)
}
});
this.frustumOutline = this.viewer.scene.primitives.add(
new Cesium.Primitive({
geometryInstances: [instance],
appearance: new Cesium.PerInstanceColorAppearance({
flat: true,
translucent: false
})
})
);
}
创建视网:
drawSketch() {
this.sketch = this.viewer.entities.add({
name: 'sketch',
position: this.viewPosition,
orientation: Cesium.Transforms.headingPitchRollQuaternion(
this.viewPosition,
Cesium.HeadingPitchRoll.fromDegrees(this.viewHeading - this.horizontalViewAngle, this.viewPitch, 0.0)
),
ellipsoid: {
radii: new Cesium.Cartesian3(
this.viewDistance,
this.viewDistance,
this.viewDistance
),
// innerRadii: new Cesium.Cartesian3(2.0, 2.0, 2.0),
minimumClock: Cesium.Math.toRadians(-this.horizontalViewAngle / 2),
maximumClock: Cesium.Math.toRadians(this.horizontalViewAngle / 2),
minimumCone: Cesium.Math.toRadians(this.verticalViewAngle + 7.75),
maximumCone: Cesium.Math.toRadians(180 - this.verticalViewAngle - 7.75),
fill: false,
outline: true,
subdivisions: 256,
stackPartitions: 64,
slicePartitions: 64,
outlineColor: Cesium.Color.YELLOWGREEN
}
});
}
获取偏航角和俯仰角:
function getHeading(fromPosition, toPosition) {
let finalPosition = new Cesium.Cartesian3();
let matrix4 = Cesium.Transforms.eastNorthUpToFixedFrame(fromPosition);
Cesium.Matrix4.inverse(matrix4, matrix4);
Cesium.Matrix4.multiplyByPoint(matrix4, toPosition, finalPosition);
Cesium.Cartesian3.normalize(finalPosition, finalPosition);
return Cesium.Math.toDegrees(Math.atan2(finalPosition.x, finalPosition.y));
}
function getPitch(fromPosition, toPosition) {
let finalPosition = new Cesium.Cartesian3();
let matrix4 = Cesium.Transforms.eastNorthUpToFixedFrame(fromPosition);
Cesium.Matrix4.inverse(matrix4, matrix4);
Cesium.Matrix4.multiplyByPoint(matrix4, toPosition, finalPosition);
Cesium.Cartesian3.normalize(finalPosition, finalPosition);
return Cesium.Math.toDegrees(Math.asin(finalPosition.z));
}
自定义材质:
export default `
#define USE_CUBE_MAP_SHADOW true
uniform sampler2D colorTexture;
uniform sampler2D depthTexture;
varying vec2 v_textureCoordinates;
uniform mat4 camera_projection_matrix;
uniform mat4 camera_view_matrix;
uniform samplerCube shadowMap_textureCube;
uniform mat4 shadowMap_matrix;
uniform vec4 shadowMap_lightPositionEC;
uniform vec4 shadowMap_normalOffsetScaleDistanceMaxDistanceAndDarkness;
uniform vec4 shadowMap_texelSizeDepthBiasAndNormalShadingSmooth;
uniform float helsing_viewDistance;
uniform vec4 helsing_visibleAreaColor;
uniform vec4 helsing_invisibleAreaColor;
struct zx_shadowParameters
{
vec3 texCoords;
float depthBias;
float depth;
float nDotL;
vec2 texelStepSize;
float normalShadingSmooth;
float darkness;
};
float czm_shadowVisibility(samplerCube shadowMap, zx_shadowParameters shadowParameters)
{
float depthBias = shadowParameters.depthBias;
float depth = shadowParameters.depth;
float nDotL = shadowParameters.nDotL;
float normalShadingSmooth = shadowParameters.normalShadingSmooth;
float darkness = shadowParameters.darkness;
vec3 uvw = shadowParameters.texCoords;
depth -= depthBias;
float visibility = czm_shadowDepthCompare(shadowMap, uvw, depth);
return czm_private_shadowVisibility(visibility, nDotL, normalShadingSmooth, darkness);
}
vec4 getPositionEC(){
return czm_windowToEyeCoordinates(gl_FragCoord);
}
vec3 getNormalEC(){
return vec3(1.);
}
vec4 toEye(in vec2 uv,in float depth){
vec2 xy=vec2((uv.x*2.-1.),(uv.y*2.-1.));
vec4 posInCamera=czm_inverseProjection*vec4(xy,depth,1.);
posInCamera=posInCamera/posInCamera.w;
return posInCamera;
}
vec3 pointProjectOnPlane(in vec3 planeNormal,in vec3 planeOrigin,in vec3 point){
vec3 v01=point-planeOrigin;
float d=dot(planeNormal,v01);
return(point-planeNormal*d);
}
float getDepth(in vec4 depth){
float z_window=czm_unpackDepth(depth);
z_window=czm_reverseLogDepth(z_window);
float n_range=czm_depthRange.near;
float f_range=czm_depthRange.far;
return(2.*z_window-n_range-f_range)/(f_range-n_range);
}
float shadow(in vec4 positionEC){
vec3 normalEC=getNormalEC();
zx_shadowParameters shadowParameters;
shadowParameters.texelStepSize=shadowMap_texelSizeDepthBiasAndNormalShadingSmooth.xy;
shadowParameters.depthBias=shadowMap_texelSizeDepthBiasAndNormalShadingSmooth.z;
shadowParameters.normalShadingSmooth=shadowMap_texelSizeDepthBiasAndNormalShadingSmooth.w;
shadowParameters.darkness=shadowMap_normalOffsetScaleDistanceMaxDistanceAndDarkness.w;
vec3 directionEC=positionEC.xyz-shadowMap_lightPositionEC.xyz;
float distance=length(directionEC);
directionEC=normalize(directionEC);
float radius=shadowMap_lightPositionEC.w;
if(distance>radius)
{
return 2.0;
}
vec3 directionWC=czm_inverseViewRotation*directionEC;
shadowParameters.depth=distance/radius-0.0003;
shadowParameters.nDotL=clamp(dot(normalEC,-directionEC),0.,1.);
shadowParameters.texCoords=directionWC;
float visibility=czm_shadowVisibility(shadowMap_textureCube,shadowParameters);
return visibility;
}
bool visible(in vec4 result)
{
result.x/=result.w;
result.y/=result.w;
result.z/=result.w;
return result.x>=-1.&&result.x<=1.
&&result.y>=-1.&&result.y<=1.
&&result.z>=-1.&&result.z<=1.;
}
void main(){
// 釉色 = 结构二维(颜色纹理, 纹理坐标)
gl_FragColor = texture2D(colorTexture, v_textureCoordinates);
// 深度 = 获取深度(结构二维(深度纹理, 纹理坐标))
float depth = getDepth(texture2D(depthTexture, v_textureCoordinates));
// 视角 = (纹理坐标, 深度)
vec4 viewPos = toEye(v_textureCoordinates, depth);
// 世界坐标
vec4 wordPos = czm_inverseView * viewPos;
// 虚拟相机中坐标
vec4 vcPos = camera_view_matrix * wordPos;
float near = .001 * helsing_viewDistance;
float dis = length(vcPos.xyz);
if(dis > near && dis < helsing_viewDistance){
// 透视投影
vec4 posInEye = camera_projection_matrix * vcPos;
// 可视区颜色
// vec4 helsing_visibleAreaColor=vec4(0.,1.,0.,.5);
// vec4 helsing_invisibleAreaColor=vec4(1.,0.,0.,.5);
if(visible(posInEye)){
float vis = shadow(viewPos);
if(vis > 0.3){
gl_FragColor = mix(gl_FragColor,helsing_visibleAreaColor,.5);
} else{
gl_FragColor = mix(gl_FragColor,helsing_invisibleAreaColor,.5);
}
}
}
}`;
在使用的时候需开启深度检测
八、自定义弹窗
(一)思路
添加一个鼠标左键点击事件,当鼠标点击时,利用Vue.extend()动态添加一个dom元素,将DOM元素渲染到cesium容器中,并利用cesium中提供的 viewer.scene.postRender 实时更新坐标位置。
(二)实现方法
1、创建地图容器
viewer = new Cesium.Viewer('cesiumContainer',{
// terrainProvider: Cesium.createWorldTerrain(),
// animation: false, // 控制场景动画的播放速度控件
// baseLayerPicker: true, // 底图切换控件
// baselLayerPicker:false,// 将图层选择的控件关掉,才能添加其他影像数据
// // fullscreenButton: false, // 全屏控件
// geocoder: false, // 地理位置查询定位控件
// homeButton: true, // 默认相机位置控件
// timeline: false, // 时间滚动条控件
// infoBox: false, //是否显示信息框
// sceneModePicker: false, //是否显示3D/2D选择器
// selectionIndicator: false, // 点击点绿色弹出 是否显示选取指示器组件
// sceneMode: Cesium.SceneMode.SCENE3D, //设定3维地图的默认场景模式:Cesium.SceneMode.SCENE2D、Cesium.SceneMode.SCENE3D、Cesium.SceneMode.MORPHING
// navigationHelpButton: false, // 默认的相机控制提示控件
// scene3DOnly: true, // 每个几何实例仅以3D渲染以节省GPU内存
// navigationInstructionsInitiallyVisible: false,
// showRenderLoopErrors: false, //是否显示渲染错误
// orderIndependentTranslucency:false,//设置背景透明
});
2、billboard 添加目标点位
点位的数据格式:
poin : [{
id:'12321321' ,
name: "北京西路测试点",
type: "固定枪机",
state: "在线",
position: {
x: 116.4568,
y: 39.8926
} ,
text:'X'
}],
将添加点的方法封装到类中:
/**
* @param {Viewer} viewer
*
*/
export default class DragEntity{
constructor(val){
this.viewer = val.viewer,
}
addEntity(value){
//数据格式{id:543595234324_432423,position:[122.8,39.9],text:"L"}
let pinBuilder = new Cesium.PinBuilder();
let poin = this.viewer.entities.add({
id:value.id,
name: value.name,
position: Cesium.Cartesian3.fromDegrees(value.position.x, value.position.y),
billboard: {
image: pinBuilder.fromText(value.text,Cesium.Color.ROYALBLUE, 48).toDataURL(),
verticalOrigin: Cesium.VerticalOrigin.BOTTOM,
},
monitoItems:{
data:value
},
});
return poin
}
}
3、添加左键点击事件
leftDownAction(){
let viewer = this.$store.state.viewer
this.handler = new Cesium.ScreenSpaceEventHandler(viewer.scene.canvas);
let _this = this
let id
_this.handler.setInputAction(function (movement) {
let pick = viewer.scene.pick(movement.position);
if (Cesium.defined(pick) && (pick.id.id) ) {
// _this.leftDownFlag = true;
id= pick.id.id;
console.log(id)
}
}, Cesium.ScreenSpaceEventType.LEFT_CLICK);
},
4、弹窗
export default class Bubble {
constructor(val){
this.viewer = val.viewer
this.div=document.createElement("div");
// this.addDynamicLabel({id:1,position:val.position,title:"cl弹窗"});
}
addDynamicLabel(data){
let div = this.div
div.id = data.id;
// div.style.display="inline"
div.style.position = "absolute";
div.style.width = "300px";
div.style.height = "30px";
let HTMLTable = `
<div style="background:#00ffef66;height:200px;border:"1px soild #08f8a7">${data.text}
<div style="">
</div>
`;
div.innerHTML = HTMLTable;
this.viewer.cesiumWidget.container.appendChild(div);
let gisPosition = data.position._value
this.viewer.scene.postRender.addEventListener(() => {
const canvasHeight = this.viewer.scene.canvas.height;
const windowPosition = new Cesium.Cartesian2();
Cesium.SceneTransforms.wgs84ToWindowCoordinates(
this.viewer.scene,
gisPosition,
windowPosition
);
div.style.bottom = canvasHeight - windowPosition.y +220 + "px";
const elWidth = div.offsetWidth;
div.style.left = windowPosition.x - elWidth / 2 + "px";
}, this);
}
clearDiv(id){
if(this.div){
var parent = this.div.parentElement;
parent.removeChild(this.div);
// this.div.removeNode(true);
this.viewer.scene.postRender.removeEventListener(this.addDynamicLabel,this)
}
}
}
修改点击事件:
import Bubble from './bubble/index.js'
leftDownAction(){
let viewer = this.$store.state.viewer
let bubble = new Bubble({
viewer:viewer
})
this.handler = new Cesium.ScreenSpaceEventHandler(viewer.scene.canvas);
let _this = this
let id
_this.handler.setInputAction(function (movement) {
let pick = viewer.scene.pick(movement.position);
if (Cesium.defined(pick) && (pick.id.id) ) {
// _this.leftDownFlag = true;
id= pick.id.id;
let entiy = this.poinEntity[id];
bubble.addDynamicLabel(entiy);
}else{
bubble.clearDiv();
}
}, Cesium.ScreenSpaceEventType.LEFT_CLICK);
},
九、cesium 广告牌优化
entityCollection 集合加上集群聚合功能,数据量临界点在 3w~4w 左右,就会出现界面卡顿。fps 低于 20 并且波动很大,延迟保持在 100ms 左右。
当数据量大于 10w+时,基本上 fps 处于 0-5,延迟大于 200ms,加载数据时延迟直接飙升几千都可能出现,同时(entityCollection 的)数据量过大直接导致浏览器崩溃无法加载。
抛开后台接口数据传递处理的优化,只针对前端 cesium 界面的所有优化方法中,billboardCollection 广告牌集合,也适合界面显示大量的 pointPrimitiveCollection(点集合)、labelCollection(label 集合)造成的界面卡顿。
优化方法:primitiveCollection与 primitiveCluster 结合使用
在不需要聚合集群的情况下,只使用 primitiveCollection就能够完美的解决广告牌 10w+造成的界面卡顿崩溃等问题。不需要聚合功能时,就不添加 primitiveCluster 来处理优化。因为聚合会监听摄像机的改变事件时刻改变聚合数量状态,反而会出现卡顿情况。
(一)primitiveCollection
广告牌集合添加代码(如下),其他的集合如 point、label,大同小异:
const billboardCollection = viewer.scene.primitives.add(
new Cesium.BillboardCollection()
);
billboardCollection.add({
position: Cesium.Cartesian3.fromDegrees(114.49, 41.23, 0),
width: 38,
height: 38,
image: "xxxxx"
});
此时往 billboardCollection 中添加的 billboard 就会直接呈现在界面上,能够轻松应对 10w+的数据量。对比EntityCollection的添加方式效果很明显:
// 之前的添加方式
const entityCollection = new Cesium.EntityCollection();
const billboard = new Cesium.BillboardGraphics({
width: 38,
height: 38,
image: "xxxxx"
});
const entity = new Cesium.Entity({
position: Cesium.Cartesian3.fromDegrees(114.49, 41.23, 0),
billboard: billboard,
s1: "xxx",
s2: "xxx",
s3: "xxx",
s4: "xxx",
s5: "xxx"
});
entityCollection.add(entity);
(二)PrimitiveCluster
primitiveCollection 的聚合功能官方并没有提供,在官方文档中只提供了 EntityCluster 方法,对 entityCollection 集合进行聚合操作。通过 EntityCluster 方法聚合时需要配合 datasource 对象使用,因为在原生的 datasource 对象自身有 clustering 属性。
由于我们直接使用的 Primitive 方式将 billboard 添加到地图中,就跳过了 datasource 的步骤。因此我们需要自己来定义一个 PrimitiveCluster 方法来创建一个 cluster 对象,针对原语集合进行聚合,结合其他博主文档提供的方法,PrimitiveCluster.js 具体实现方法总结如下:
一)往 cesium 的包文件或者依赖文件中添加 PrimitiveCluster 方法
1.添加的路径:
(1)npm 包中----- node_modules\cesium\Source\DataSources\PrimitiveCluster.js
(2)引入外部文件方式 ---- Source\DataSources\PrimitiveCluster.js
2.复制同目录下 EntityCluster.js 内容到 PrimitiveCluster.js 中
3.文件内全局修改名称,EntityCluster -> PrimitiveCluster、 entityCluster -> primitiveCluster
4.屏蔽 getScreenSpacePositions 方法中的代码块
(EntityCluster 中 item.id 指向的就是 entity 实体对象,在 primitiveCollection 中 item.id 为 undefined 会包错)
/* var canClusterLabels =
primitiveCluster._clusterLabels && defined(item._labelCollection);
var canClusterBillboards =
primitiveCluster._clusterBillboards && defined(item.id._billboard);
var canClusterPoints =
primitiveCluster._clusterPoints && defined(item.id._point);
if (canClusterLabels && (canClusterPoints || canClusterBillboards)) {
continue;
} */
第 4 步时 如果在添加广告牌时需要为广告牌添加唯一的标识 id(如下添加方式),则可以不用屏蔽源代码,添加的 id 能够规避此处报错
billboardCollection.add({
id: "xxx",
position: Cesium.Cartesian3.fromDegrees(114.49, 41.23, 0),
width: 38,
height: 38,
image: "xxxxx"
});
5.在 PrimitiveCluster.js 的上级目录(node_modules\cesium\Source\Cesium.js)中找到入口文件 cesium.js,导入 PrimitiveCluster 方法
export { default as PrimitiveCluster } from "./DataSources/PrimitiveCluster.js";
可以直接通过 new Cesium.PrimitiveCluster()的方式来调用
二)PrimitiveCluster 方法来实现聚合
1.往 scene.primitives 中添加原语集合 primitives
2.创建一个空 billboardCollection 广告牌集合
3.通过 PrimitiveCluster 方法创建一个 cluster 实例对象 primitiveCluster
4.将 primitiveCluster 添加到集合 primitives 中
5.配置 primitiveCluster 对象的基本参数(不配置有默认参数)
6.将空 billboardCollection 广告牌集合赋予primitiveCluster._billboardCollection,手动添加聚合内容
primitiveCluster._labelCollection;
primitiveCluster._pointCollection;
7.调用_initialize 方法初始化 cluster 实例的事件监听
8.之后与 datasource 聚合方式的.then 方法一致,将 dataSource.clustering.clusterEvent.addEventListener 换成 primitiveCluster.clusterEvent.addEventListener
const primitives = viewer.scene.primitives.add(
new Cesium.PrimitiveCollection()
);
const billboardCollection = new Cesium.BillboardCollection();
const primitiveCluster = new Cesium.PrimitiveCluster();
primitives.add(primitiveCluster);
primitiveCluster.enabled = true; //开启聚合功能
primitiveCluster.pixelRange = 15; //范围
primitiveCluster.minimumClusterSize = 2; //最小聚合数量
primitiveCluster._billboardCollection = billboardCollection;
primitiveCluster._initialize(viewer.scene);
primitiveCluster.clusterEvent.addEventListener(function(
clusteredEntities,
cluster
) {
// ... 处理聚合显示广告牌代码块与dataSource处理方式一致
});
按照上面的方式完成聚合后,往 billboardCollection 集合中添加 billboard 广告牌就会在页面呈现出来并且聚合显示。但是数据量 10w+的情况下,在处理摄像机视角改变的监听事件时会出现卡顿问题。
(三)优化 PrimitiveCluster 卡顿问题
在 PrimitiveCluster.js 的_initialize 方法中,可以看到原方法使用 createDeclutterCallback 方法创建了一个回调方法,并将这个回调方法添加到了 scene.camera.changed 监听中。因此只要 scene.camera 视角改变,就会执行聚合的处理逻辑方法返回两个参数 clusteredEntities 与 cluster。
primitiveCluster.clusterEvent.addEventListener(function(
clusteredEntities,
cluster
) {
// ... 处理聚合显示广告牌代码块与dataSource处理方式一致
});
只需要在_initialize 方法加一个防抖的定时器,让它事件处理频率降低就能达到优化的效果。同时暴露 delay 时间参数可以在实例化后进行配置改变
//1.PrimitiveCluster构造函数中添加_delay参数
this._delay = defaultValue(options.delay, 800)
//2.在PrimitiveCluster.prototype拦截器Object.defineProperties方法中添加_delay的访问以及设置方法
delay: {
get: function () {
return this._delay;
},
set: function (value) {
this._delay = value;
},
},
// 3._initialize方法改造
PrimitiveCluster.prototype._initialize = function(scene) {
this._scene = scene;
var cluster = createDeclutterCallback(this);
this._cluster = cluster;
var _t = null;
const _self = this;
this._removeEventListener = scene.camera.changed.addEventListener(function(amount) {
if (_t) {
clearTimeout(_t);
_t = null;
}
_t = setTimeout(() => {
cluster(amount);
}, _self._delay);
});
};
(四)功能代码记录
import * as Cesium from "cesium/Cesium";
import defaultValue from "./core/defaultValue";
/**
* @_v 引入外部创建的Viewer实例(new Cesium.Viewer(...))
* @myPrimitives 原语集合,可以包含页面显示的pointPrimitiveCollection、billboardCollection、labelCollection、primitiveCollection、primitiveCluster
* @myPrimitiveCluster 自定义原语集群
* @myBillboardCollection 广告牌集合(站点显示的内容数据)
*
* @desc 使用primitiveCollection原语集合与primitiveCluster原语集群,处理地图界面显示广告牌billboard数量 > 10w 级时,界面卡顿,浏览器崩溃等问题
*/
class CommomSiteTookit {
static _v = null;
myPrimitives = null;
myPrimitiveCluster = null;
myBillboardCollection = null;
constructor() {}
/**
* @desc 使用commomSiteTookit实例前,必须先初始化该实例的_v对象
*/
init(viewer) {
this._v = viewer;
}
/**
* @param [options] 具有以下属性的对象
* @param [options.delay=800] 防抖处理定时器的time
* @param [options.enabled=true] 是否启用集群
* @param [options.pixelRange=15] 用于扩展屏幕空间包围框的像素范围
* @param [options.minimumClusterSize=2] 可集群的屏幕空间对象的最小数量
*
* @desc 处理原语集合,并实现聚合集群功能方法
* @return billboardCollection集合,可直接往集合里添加广告牌billboard,呈现在页面上
*/
load(options = {}) {
let billboardCollection = new Cesium.BillboardCollection();
if (Cesium.defined(this.myPrimitives)) {
this._v.scene.primitives.remove(this.myPrimitives);
}
this.myPrimitives = this._v.scene.primitives.add(
new Cesium.PrimitiveCollection()
);
const primitiveCluster = new Cesium.PrimitiveCluster();
this.myPrimitives.add(primitiveCluster);
primitiveCluster.delay = defaultValue(options.delay, 800);
primitiveCluster.enabled = defaultValue(options.enabled, true);
primitiveCluster.pixelRange = defaultValue(options.pixelRange, 15);
primitiveCluster.minimumClusterSize = defaultValue(
options.minimumClusterSize,
2
);
primitiveCluster._billboardCollection = billboardCollection;
primitiveCluster._initialize(this._v.scene);
let removeListener;
let pinBuilder = new Cesium.PinBuilder();
/* 定义广告牌 fromText(显示文字,颜色,大小) */
let pin50 = pinBuilder.fromText("50+", Cesium.Color.RED, 40).toDataURL();
let pin40 = pinBuilder.fromText("40+", Cesium.Color.ORANGE, 40).toDataURL();
let pin30 = pinBuilder.fromText("30+", Cesium.Color.YELLOW, 40).toDataURL();
let pin20 = pinBuilder.fromText("20+", Cesium.Color.GREEN, 40).toDataURL();
let pin10 = pinBuilder.fromText("10+", Cesium.Color.BLUE, 40).toDataURL();
/* 数量小于十个的聚合广告牌 */
let singleDigitPins = new Array(8);
for (let i = 0; i < singleDigitPins.length; ++i) {
singleDigitPins[i] = pinBuilder
.fromText("" + (i + 2), Cesium.Color.VIOLET, 40)
.toDataURL();
}
const _ = this;
function customStyle() {
if (Cesium.defined(removeListener)) {
removeListener();
removeListener = undefined;
} else {
removeListener = primitiveCluster.clusterEvent.addEventListener(
function(clusteredEntities, cluster) {
cluster.label.show = false;
cluster.billboard.show = true;
cluster.billboard.id = cluster.label.id;
cluster.billboard.verticalOrigin = Cesium.VerticalOrigin.BOTTOM;
/* 根据站点(参数)的数量给予对应的广告牌 */
if (clusteredEntities.length >= 50) {
cluster.billboard.image = pin50;
} else if (clusteredEntities.length >= 40) {
cluster.billboard.image = pin40;
} else if (clusteredEntities.length >= 30) {
cluster.billboard.image = pin30;
} else if (clusteredEntities.length >= 20) {
cluster.billboard.image = pin20;
} else if (clusteredEntities.length >= 10) {
cluster.billboard.image = pin10;
} else {
cluster.billboard.image =
singleDigitPins[clusteredEntities.length - 2];
}
}
);
}
// force a re-cluster with the new styling
let pixelRange = primitiveCluster.pixelRange;
primitiveCluster.pixelRange = 0;
primitiveCluster.pixelRange = pixelRange;
_.myPrimitiveCluster = primitiveCluster;
}
this.myBillboardCollection = billboardCollection;
// start with custom style
customStyle();
return billboardCollection;
}
/**
* @params enable bool值控制开启或关闭集群
* @desc 控制集群生效与否
*/
enableCluster(enable) {
if (Cesium.defined(this.myPrimitiveCluster)) {
this.myPrimitiveCluster.enabled = enable;
}
}
/**
* @params id 站点ID
* @return 返回可操作的广告牌[siteBillboard.image = 'xxxx']
* @desc 根据id在集合中获取指定站点广告牌
*/
getSiteBillboardById(id) {
if (!Cesium.defined(this.myBillboardCollection)) return undefined;
const _b = this.myBillboardCollection;
const l = _b.length;
let siteBillboard = undefined;
for (let i = 0; i < l; i++) {
if (id == _b.get(i).id) {
siteBillboard = _b.get(i);
break;
}
}
return siteBillboard;
}
/**
* @desc 删除所有站点广告牌
*/
removeAll() {
if (Cesium.defined(this.myPrimitives)) {
this._v.scene.primitives.remove(this.myPrimitives);
}
}
/**
* @params show bool值 控制显示或隐藏
* @desc 隐藏或显示所有站点广告牌
*/
showStatus(show = true) {
this.myPrimitives.show = show;
}
/**
* @desc 根据id删除指定站点广告牌
*/
remove(id) {
const billboard = this.getSiteBillboardById(id);
billboard && this.myBillboardCollection.remove(billboard);
}
/**
* @desc 销毁(目前退出页面时直接viewer销毁)
*/
destroy() {
this.myPrimitives = null;
this.myPrimitiveCluster = null;
this.myBillboardCollection = null;
// this._v.scene.primitives.destroy()
}
}
export default new CommomSiteTookit();
在执行commomSiteTookit.init(viewer)后,加载数据主要的操作在 load 方法中,load 返回的 billboardCollection,可以动态的添加 billboard 数据,直接呈现在界面,代码如下:
const list = ['10w+数据']
const l = list.length
const data = commomSiteTookit.load({
enabled: true,
delay: 1200,
pixelRange: 20
});
for (let i = 0; i < l; i++) {
data.add({
image: `xxxx`,
scaleByDistance: new Cesium.NearFarScalar(1.5e2, 1, 1.5e7, 0.2),
width: 38, // default: undefined
height: 38, // default: undefined
position: Cesium.Cartesian3.fromDegrees(
list[i].longitude,
list[i].latitude,
0
),
id: list[i].id + ""
});
}
十、可视域分析
①利用高程判别:视角初始位置和视域目标点之间组成的一条直线,我们暂且称之为当前视角下的“视域线”,对该直线进行空间插值,获得直线上一系列的空间插值点。对于获取到的每个插值点P(x,y,z)通过getHeight()方法来获取当前场景下(x,y)点的地表高程h,对比z与h的高程关系。若z<h,则证明,该插值点位于地表下,可以归属于不可视域点;反之,若z>h,则归属于可视域点。这样就可以获取到视域线在当前插值精度下的可视域情况。
②pick取交:视角初始位置和视域目标点之间组成的一条射线(方向:视角位置→目标点),我们也称之为“视域线”,通过pickFromRay()方法,可以返回当前视域线与场景(地形或模型等)相交情况result。若result存在,则视角初始位置与result.position之间的区域归属于可视域范围,result.position与目标点之间的区域归属于不可视域范围;若result不存在,即无交点出现,全区域归属于可视域范围。
var createViewershed = function () {
// 开启地形深度监测
viewer.scene.globe.depthTestAgainstTerrain = true;
// 设定初始视角位置点
var viewPoint = Cesium.Cartesian3.fromDegrees(115.77774943, 40.51669238, 1000);
var viewPointEntity = viewer.entities.add({
position: viewPoint,
ellipsoid: {
radii: new Cesium.Cartesian3(5, 5, 5),
material: Cesium.Color.YELLOW
},
});
// 视角位置创建坐标轴
var transform = Cesium.Transforms.eastNorthUpToFixedFrame(viewPoint);
var modelMatrixPrimitive = viewer.scene.primitives.add(new Cesium.DebugModelMatrixPrimitive({
modelMatrix: transform,
length: 10.0
}));
// 世界坐标转换为投影坐标
var webMercatorProjection = new Cesium.WebMercatorProjection(viewer.scene.globe.ellipsoid);
var viewPointWebMercator = webMercatorProjection.project(Cesium.Cartographic.fromCartesian(viewPoint));
// 排除碰撞监测的对象
var objectsToExclude = [viewPointEntity, modelMatrixPrimitive];
// 目标点集合
var TargetPoints = [];
// 视域点和目标点的距离
var radius = 0;
// 计算45°和135°之间的目标点
for (var i = 45; i <= 135; i++) {
var linePoints = [];//记录一条线上的所有目标点
var pointsNum = 15;//该方向插值点数
var lineDis = 200;//每两个插值点之间的距离m1
for (let index = 0; index < pointsNum; index++) {
radius = index * lineDis;
// 度数转弧度
var radians = Cesium.Math.toRadians(i);
// 计算目标点
var toPoint = new Cesium.Cartesian3(viewPointWebMercator.x + radius * Math.cos(radians), viewPointWebMercator.y + radius * Math.sin(radians), 0);
// 投影坐标转世界坐标
toPoint = webMercatorProjection.unproject(toPoint);
// TargetPoints.push(Cesium.Cartographic.toCartesian(toPoint.clone()));
var m_cartesian3 = Cesium.Cartographic.toCartesian(toPoint.clone());
var m_ellipsoid = viewer.scene.globe.ellipsoid;
var m_cartographic = m_ellipsoid.cartesianToCartographic(m_cartesian3);
var m_height = viewer.scene.globe.getHeight(m_cartographic);
var m_point = Cesium.Cartesian3.fromDegrees(m_cartographic.longitude / Math.PI * 180, m_cartographic.latitude / Math.PI * 180, m_height);
linePoints.push({
data: m_point,
show: true
});
}
TargetPoints.push({
id: i,
points: linePoints
});
}
pickFromRay();
function pickFromRay() {
for (var i = 0; i < TargetPoints.length; i++) {
var cur_LinePoints = TargetPoints[i].points;
cur_LinePoints.forEach(element => {
// 计算射线的方向,目标点left 视域点right
var direction = Cesium.Cartesian3.normalize(Cesium.Cartesian3.subtract(element.data, viewPoint, new Cesium.Cartesian3()), new Cesium.Cartesian3());
// 建立射线
var ray = new Cesium.Ray(viewPoint, direction);
// var results = viewer.scene.drillPickFromRay(ray, 10, objectsToExclude); // 计算所有的交互点,最大不超过10个
var result = viewer.scene.pickFromRay(ray, objectsToExclude); // 计算交互点,返回第一个
var buffer = ReturnDistance(element.data, result.position);
// var M_color = Cesium.Color.GREEN;
if (buffer > 10) {
// M_color = Cesium.Color.RED;
element.show = false;
}
//添加当前视域目标点可视化信息
// viewer.entities.add({
// name: "aaaa" + i,
// position: element.data,
// ellipsoid: {
// radii: new Cesium.Cartesian3(30, 30, 30),
// material: M_color
// },
// })
});
}
drawViewshedLine(TargetPoints);
}
function drawViewshedLine(data) {
for (let index = 0; index < data.length; index++) {
const element = data[index].points;
var startIndex = 0;
for (let i = 0; i < element.length; i++) {
var defaultColor = new Cesium.Color(0.1, 1, 0.1, 0.3);
// console.log("第" + i + '个点的起点是:' + startIndex);
const m_linestart = element[startIndex];
var m_lineshow = m_linestart.show;
const m_lineCurrent = element[i];
const m_lineEnd = element[i + 1];
if (m_lineEnd && m_lineCurrent.show != m_lineEnd.show) {
if (!m_lineshow) {
defaultColor = new Cesium.Color(1, 0.1, 0.1, 0.3);
}
viewer.entities.add({
polyline: {
positions: [m_linestart.data, m_lineEnd.data],
width: 2,
material: defaultColor,
clampToGround: true
}
});
startIndex = i + 1;
}
else if (!m_lineEnd) {
if (!m_lineshow) {
defaultColor = new Cesium.Color(1, 0.1, 0.1, 0.3);
}
viewer.entities.add({
polyline: {
positions: [m_linestart.data, m_lineCurrent.data],
// arcType: Cesium.ArcType.NONE,
width: 2,
material: defaultColor,
// depthFailMaterial: defaultColor,
clampToGround: true
}
});
}
}
}
}
//空间两点距离计算函数
function ReturnDistance(pos0, pos1) {
var distance = 0;
var point1cartographic = Cesium.Cartographic.fromCartesian(pos0);
var point2cartographic = Cesium.Cartographic.fromCartesian(pos1);
/**根据经纬度计算出距离**/
var geodesic = new Cesium.EllipsoidGeodesic();
geodesic.setEndPoints(point1cartographic, point2cartographic);
var s = geodesic.surfaceDistance;
return s.toFixed(2);
}
// 处理交互点
function showIntersection(result, destPoint, viewPoint) {
// 如果是场景模型的交互点,排除交互点是地球表面
if (Cesium.defined(result) && Cesium.defined(result.object)) {
drawLine(result.position, viewPoint, Cesium.Color.GREEN); // 可视区域
drawLine(result.position, destPoint, Cesium.Color.RED); // 不可视区域
} else {
drawLine(viewPoint, destPoint, Cesium.Color.GREEN);
}
}
}