一、数据准备
DETR用的是COCO格式的数据集。
- 如果要用DETR训练自己的数据集,直接利用
Labelimg标注成COCO格式。 - 如果是VOC数据集的话,要做一个格式转换,yolo格式的数据集,转换成coco格式
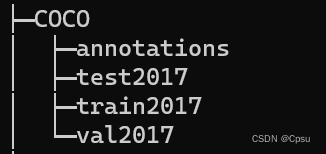
COCO数据集的格式类似这样,annotations文件夹里面有对应的train、val数据集的json文件。train2017则是训练集图片,其他同理。
VOC数据集的存放方式是这样的,转换格式就是找出Main文件夹下用于目标检测的图片。
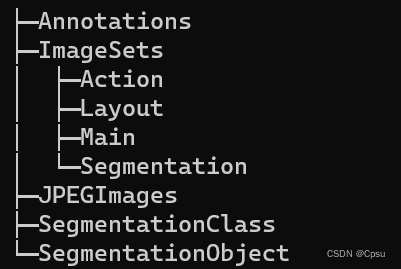
Main文件夹下有train.txt文件,记录了训练集的图片。val.txt记录了验证集的图片
只需要修改注释中的两个路径即可(创建文件夹时没有加判断语句严谨一点应该加上)。
import os
import shutil
import sys
import json
import glob
import xml.etree.ElementTree as ET
START_BOUNDING_BOX_ID = 1
# PRE_DEFINE_CATEGORIES = None
# If necessary, pre-define category and its id
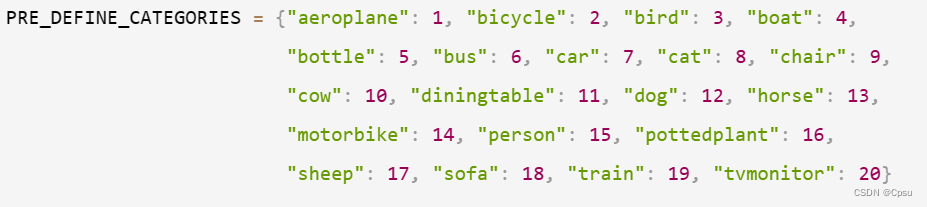
PRE_DEFINE_CATEGORIES = {"aeroplane": 1, "bicycle": 2, "bird": 3, "boat": 4,
"bottle": 5, "bus": 6, "car": 7, "cat": 8, "chair": 9,
"cow": 10, "diningtable": 11, "dog": 12, "horse": 13,
"motorbike": 14, "person": 15, "pottedplant": 16,
"sheep": 17, "sofa": 18, "train": 19, "tvmonitor": 20}
def get(root, name):
vars = root.findall(name)
return vars
def get_and_check(root, name, length):
vars = root.findall(name)
if len(vars) == 0:
raise ValueError("Can not find %s in %s." % (name, root.tag))
if length > 0 and len(vars) != length:
raise ValueError(
"The size of %s is supposed to be %d, but is %d."
% (name, length, len(vars))
)
if length == 1:
vars = vars[0]
return vars
def get_filename_as_int(filename):
try:
filename = filename.replace("\\", "/")
filename = os.path.splitext(os.path.basename(filename))[0]
return int(filename)
except:
raise ValueError(
"Filename %s is supposed to be an integer." % (filename))
def get_categories(xml_files):
"""Generate category name to id mapping from a list of xml files.
Arguments:
xml_files {list} -- A list of xml file paths.
Returns:
dict -- category name to id mapping.
"""
classes_names = []
for xml_file in xml_files:
tree = ET.parse(xml_file)
root = tree.getroot()
for member in root.findall("object"):
classes_names.append(member[0].text)
classes_names = list(set(classes_names))
classes_names.sort()
return {name: i for i, name in enumerate(classes_names)}
def convert(xml_files, json_file):
json_dict = {"images": [], "type": "instances",
"annotations": [], "categories": []}
if PRE_DEFINE_CATEGORIES is not None:
categories = PRE_DEFINE_CATEGORIES
else:
categories = get_categories(xml_files)
bnd_id = START_BOUNDING_BOX_ID
for xml_file in xml_files:
tree = ET.parse(xml_file)
root = tree.getroot()
path = get(root, "path")
if len(path) == 1:
filename = os.path.basename(path[0].text)
elif len(path) == 0:
filename = get_and_check(root, "filename", 1).text
else:
raise ValueError("%d paths found in %s" % (len(path), xml_file))
# The filename must be a number
image_id = get_filename_as_int(filename)
size = get_and_check(root, "size", 1)
width = int(get_and_check(size, "width", 1).text)
height = int(get_and_check(size, "height", 1).text)
image = {
"file_name": filename,
"height": height,
"width": width,
"id": image_id,
}
json_dict["images"].append(image)
# Currently we do not support segmentation.
# segmented = get_and_check(root, 'segmented', 1).text
# assert segmented == '0'
for obj in get(root, "object"):
category = get_and_check(obj, "name", 1).text
if category not in categories:
new_id = len(categories)
categories[category] = new_id
category_id = categories[category]
bndbox = get_and_check(obj, "bndbox", 1)
xmin = int(get_and_check(bndbox, "xmin", 1).text) - 1
ymin = int(get_and_check(bndbox, "ymin", 1).text) - 1
xmax = int(get_and_check(bndbox, "xmax", 1).text)
ymax = int(get_and_check(bndbox, "ymax", 1).text)
assert xmax > xmin
assert ymax > ymin
o_width = abs(xmax - xmin)
o_height = abs(ymax - ymin)
ann = {
"area": o_width * o_height,
"iscrowd": 0,
"image_id": image_id,
"bbox": [xmin, ymin, o_width, o_height],
"category_id": category_id,
"id": bnd_id,
"ignore": 0,
"segmentation": [],
}
json_dict["annotations"].append(ann)
bnd_id = bnd_id + 1
for cate, cid in categories.items():
cat = {"supercategory": "none", "id": cid, "name": cate}
json_dict["categories"].append(cat)
os.makedirs(os.path.dirname(json_file), exist_ok=True)
json_fp = open(json_file, "w")
json_str = json.dumps(json_dict)
json_fp.write(json_str)
json_fp.close()
if __name__ == "__main__":
# 只需修改以下两个路径
# VOC数据集根目录
voc_path = "VOC2012"
# 保存coco格式数据集根目录
save_coco_path = "VOC2COCO"
# VOC只分了训练集和验证集即train.txt和val.txt
data_type_list = ["train", "val"]
for data_type in data_type_list:
os.makedirs(os.path.join(save_coco_path, data_type+"2017"))
os.makedirs(os.path.join(save_coco_path, data_type+"_xml"))
with open(os.path.join(voc_path, "ImageSets\Main", data_type+".txt"), "r") as f:
txt_ls = f.readlines()
txt_ls = [i.strip() for i in txt_ls]
for i in os.listdir(os.path.join(voc_path, "JPEGImages")):
if os.path.splitext(i)[0] in txt_ls:
shutil.copy(os.path.join(voc_path, "JPEGImages", i),
os.path.join(save_coco_path, data_type+"2017", i))
shutil.copy(os.path.join(voc_path, "Annotations", i[:-4]+".xml"), os.path.join(
save_coco_path, data_type+"_xml", i[:-4]+".xml"))
xml_path = os.path.join(save_coco_path, data_type+"_xml")
xml_files = glob.glob(os.path.join(xml_path, "*.xml"))
convert(xml_files, os.path.join(save_coco_path,
"annotations", "instances_"+data_type+"2017.json"))
shutil.rmtree(xml_path)
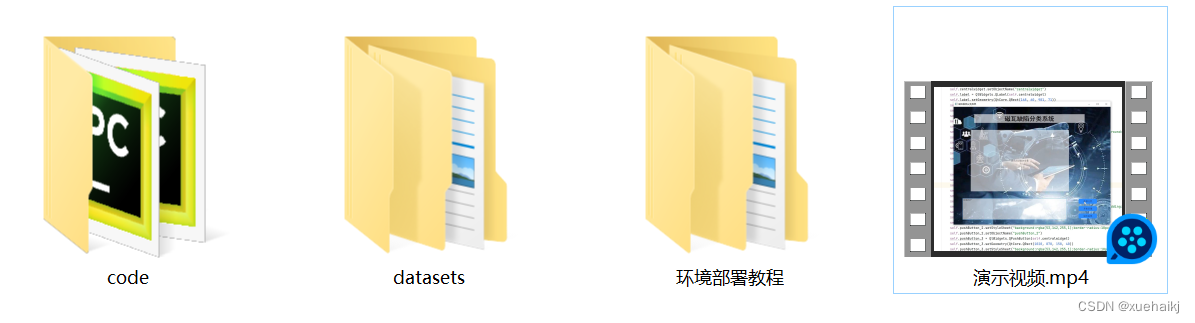
结果如图所示,在voc2coco文件夹下有三个文件:
二、配置DETR
推荐使用命令行传递参数,这里修改main.py只是为了说明参数的意义,例如:
python -m torch.distributed.launch --nproc_per_node=8 --use_env main.py --coco_path /path/to/coco --output_dir ./output
对于argparse命令行参数的传递有问题可以参考:argparse — 命令行选项、参数和子命令解析器详解
修改main.py文件中的参数、超参数:

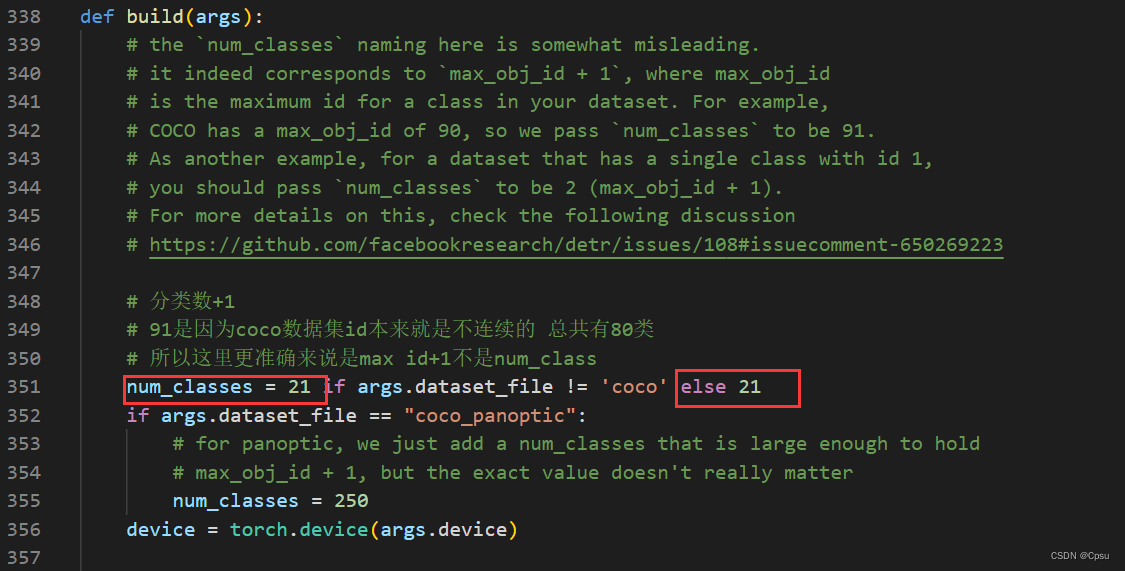
这个最好不改,就设为coco。去修改models/detr.py 文件的num_classes(大概在三百多行)。这里作者也解释了num_classes其实并不是类别数,因为coco只有80类,因为coco的id是不连续的,coco数据集最大的ID是90,所以原论文时写的MAX ID +1 即91。对于我们自定义的和转化的VOC数据集num_classes就是类别数。

coco_path改成自己的coco路径。

其中预训练权重需要修改一下,coco是80类,不能直接加载官方的模型。voc是20类。把num_classes改成21。传入得到的detr_r50_21.pth新的权重文件。
import torch
pretrained_weights=torch.load('detr-r50-e632da11.pth')
num_classes=21
pretrained_weights["model"]["class_embed.weight"].resize_(num_classes+1,256)
pretrained_weights["model"]["class_embed.bias"].resize_(num_classes+1)
torch.save(pretrained_weights,"detr_r50_%d.pth"%num_classes)
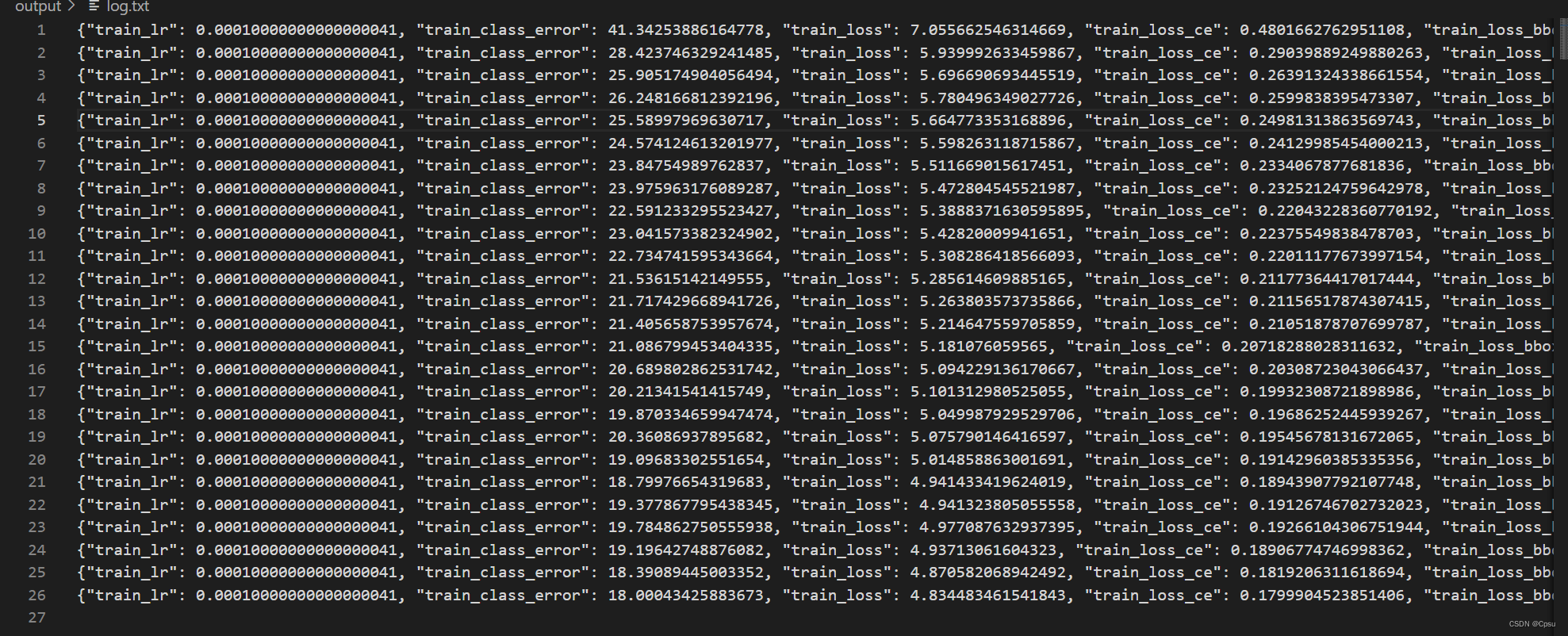
运行日志(特别难训练):
三、绘图
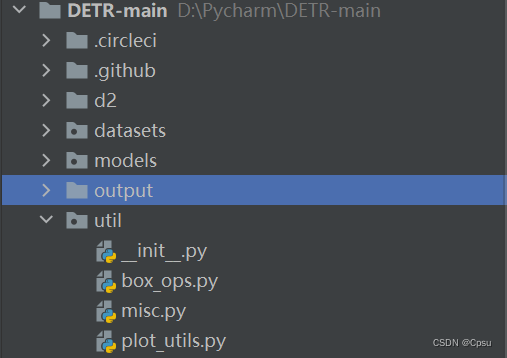
在util文件夹下有plot_utils.py文件,可以绘制损失和mAP曲线。
在plot_utils.py文件中加入代码运行即可:
if __name__ == "__main__":
# 路径更换为保存输出的eval路径
# mAP曲线
files=list(Path("./outputs/eval").glob("*.pth"))
plot_precision_recall(files)
plt.show()
# 路径更换为保存输出的路径
# 损失曲线
plot_logs(Path("./output"))
plt.show()
四、推理
训练完毕后我们会得到一个checkpoint.pth的文件,可以用自己训练得到的模型来推理图片,代码如下:
import numpy as np
from models.detr import build
from PIL import Image
import matplotlib.pyplot as plt
import torch
import torchvision.transforms as transforms
torch.set_grad_enabled(False)
COLORS = [[0.000, 0.447, 0.741], [0.850, 0.325, 0.098], [0.929, 0.694, 0.125],
[0.494, 0.184, 0.556], [0.466, 0.674, 0.188], [0.301, 0.745, 0.933]]
transform_input = transforms.Compose([transforms.Resize(800),
transforms.ToTensor(),
transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])])
def box_cxcywh_to_xyxy(x):
x_c, y_c, w, h = x.unbind(1)
b = [(x_c - 0.5 * w), (y_c - 0.5 * h),
(x_c + 0.5 * w), (y_c + 0.5 * h)]
return torch.stack(b, dim=1)
def rescale_bboxes(out_bbox, size):
img_w, img_h = size
b = box_cxcywh_to_xyxy(out_bbox)
b = b * torch.tensor([img_w, img_h, img_w, img_h], dtype=torch.float32, device="cuda")
return b
def plot_results(pil_img, prob, boxes, img_save_path):
plt.figure(figsize=(16, 10))
plt.imshow(pil_img)
ax = plt.gca()
colors = COLORS * 100
for p, (xmin, ymin, xmax, ymax), c in zip(prob, boxes.tolist(), colors):
ax.add_patch(plt.Rectangle((xmin, ymin), xmax - xmin, ymax - ymin,
fill=False, color=c, linewidth=3))
cl = p.argmax()
text = f'{CLASSES[cl]}: {p[cl]:0.2f}'
ax.text(xmin, ymin, text, fontsize=9,
bbox=dict(facecolor='yellow', alpha=0.5))
plt.savefig(img_save_path)
plt.axis('off')
plt.show()
def main(chenkpoint_path, img_path, img_save_path):
args = torch.load(chenkpoint_path)['args']
model = build(args)[0]
device = "cuda" if torch.cuda.is_available() else "cpu"
model.to(device)
# 加载模型参数
model_data = torch.load(chenkpoint_path)['model']
model.load_state_dict(model_data)
model.eval()
img = Image.open(img_path).convert('RGB')
size = img.size
inputs = transform_input(img).unsqueeze(0)
outputs = model(inputs.to(device))
# 这类最后[0, :, :-1]索引其实是把背景类筛选掉了
probs = outputs['pred_logits'].softmax(-1)[0, :, :-1]
# 可修改阈值,只输出概率大于0.7的物体
keep = probs.max(-1).values > 0.7
bboxes_scaled = rescale_bboxes(outputs['pred_boxes'][0, keep], size)
# 保存输出结果
ori_img = np.array(img)
plot_results(ori_img, probs[keep], bboxes_scaled, img_save_path)
if __name__ == "__main__":
CLASSES = ['N/A', "aeroplane", "bicycle", "bird", "boat",
"bottle", "bus", "car", "cat", "chair",
"cow", "diningtable", "dog", "horse",
"motorbike", "person", "pottedplant",
"sheep", "sofa", "train", "tvmonitor", "background"]
main(chenkpoint_path="checkpoint.pth", img_path="test.png",
img_save_path="result2.png")
几点说明:
1.CLASSES是我们数据集对应的类别名,注意自己标注的顺序一定写对。
第一个类别是"N/A"既不是背景也不是前景,因为我们转换的数据集的索引是从1开始的,所以索引为0的类别就缺失了。背景类应该是索引最大的也就是第21类。其实上面的"background"我认为加上才是最严谨的。
2
chenkpoint_path:保存的权重文件
img_path:测试的图片路径
img_save_path:保存结果路径
3.可修改阈值,论文中默认只输出概率大于0.7的物体。
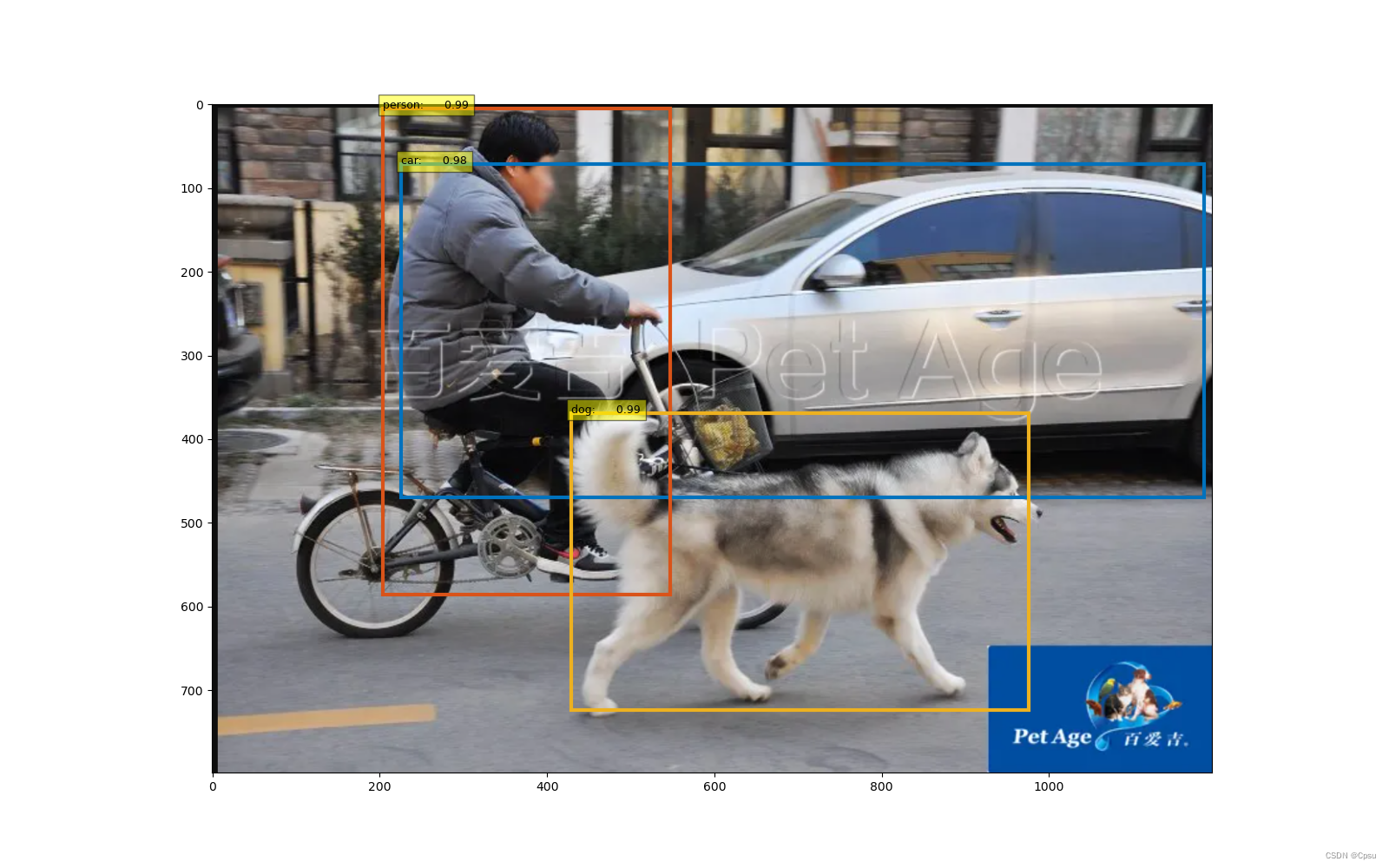
用VOC数据集训练的模型推理效果:
(VOC数据集中没有自行车一类所以识别不出来)
五、一些小bug
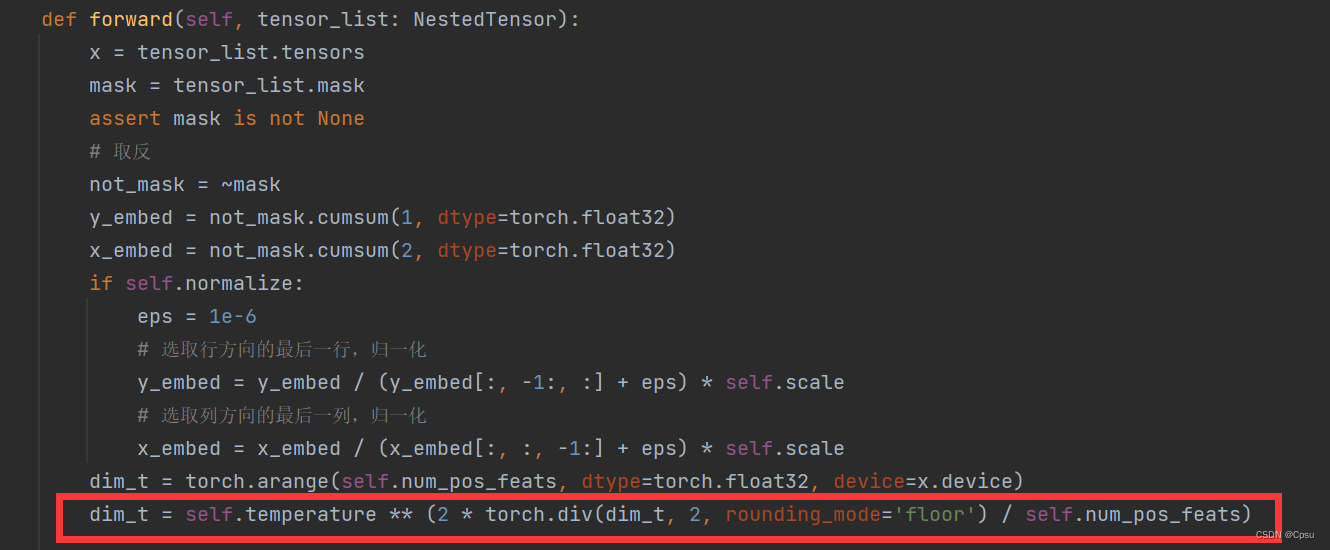
1.取整问题
UserWarning: floordiv is deprecated, and its behavior will change in a future version of pytorch. It currently rounds toward 0 (like the ‘trunc’ function NOT ‘floor’). This results in incorrect rounding for negative values. To keep the current behavior, use torch.div(a, b, rounding_mode=‘trunc’), or for actual floor division, use torch.div(a, b, rounding_mode=‘floor’).

这时一个torch版本原因导致的一个函数问题,报了一个警告。
将models/position_encoding.py文件中的第44行改成如下形式即可。
2.num_class的设置问题
num_class的设置问题在github上有详细的讨论
引用作者原话:
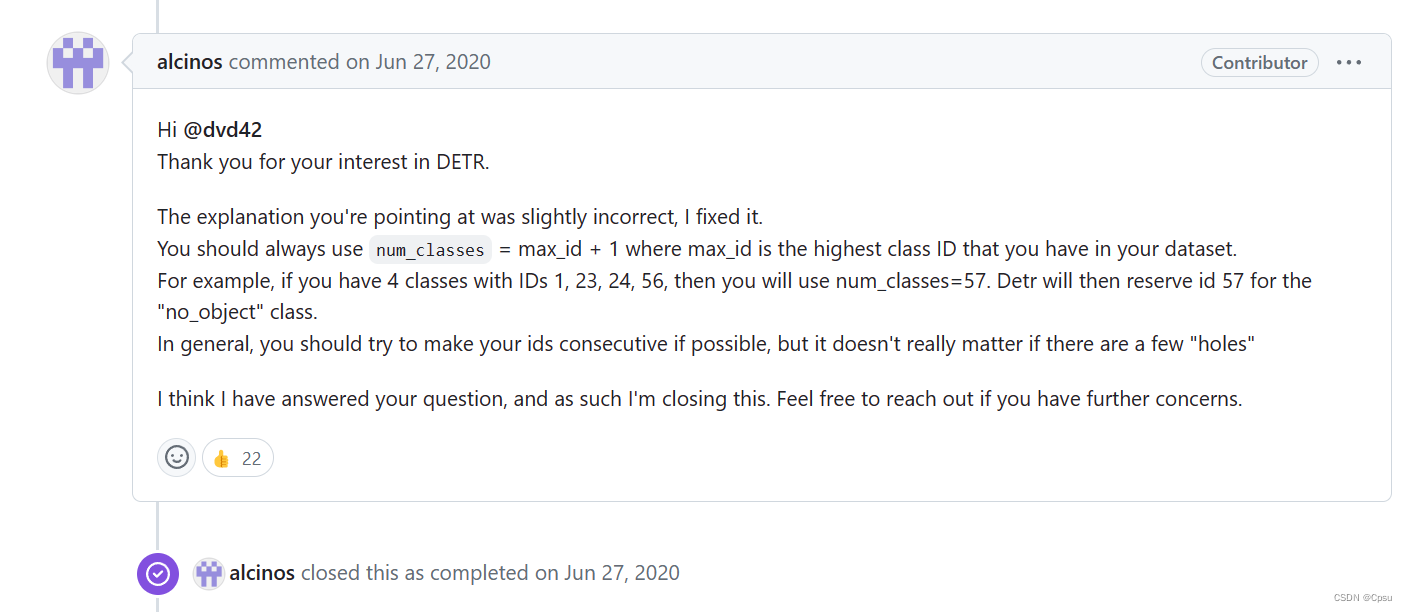
num_class应该设置为max_id+1,比如上面的voc2coco数据集,索引从1到20,那么num_class应该设置为20+1=21,索引为21的类为背景类,但是因为索引从1开始,所以把索引为0 的类设置为N/A,既不是背景也不是前景,应该是缺失类。作者举例4个类别IDs分别为1,23,24,56那么num_class应该设置为57,索引为57的类为背景类。其中缺失索引值:0、2-22、25-55应该用N/A填充,都是缺失类。
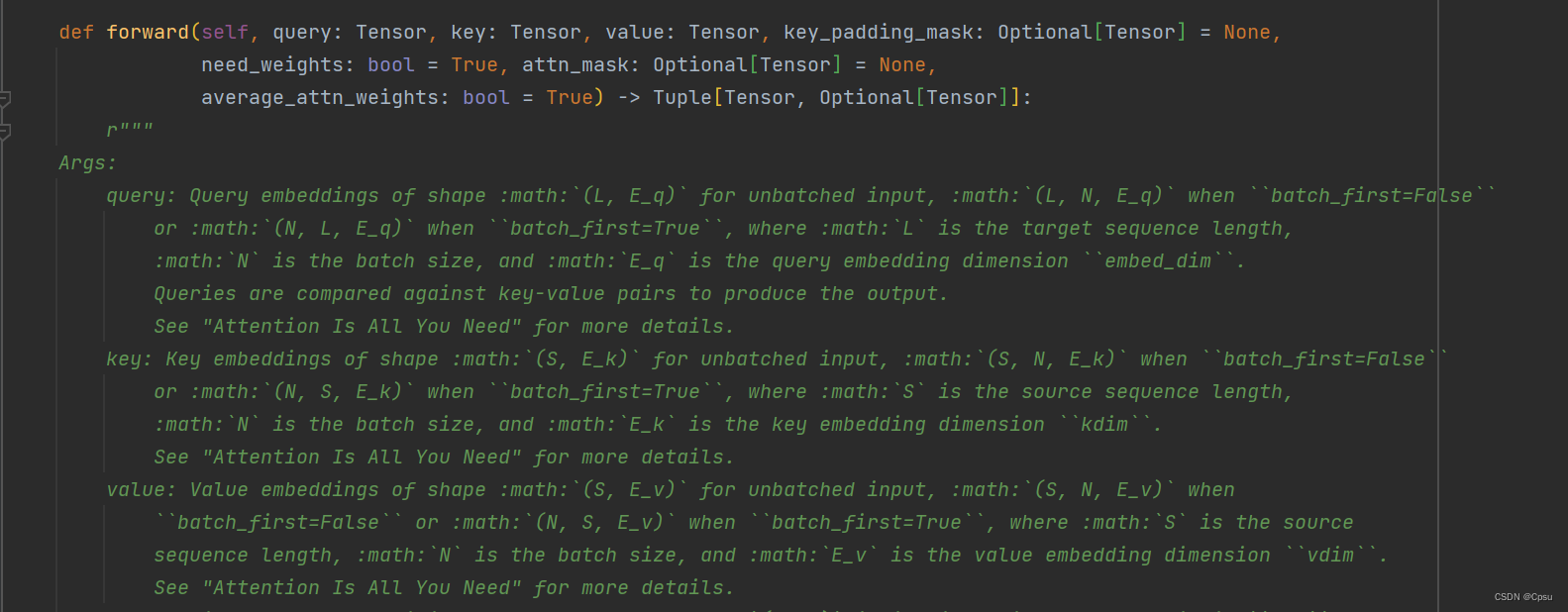
3.Encoder的输入为什么要把特征图的维度进行变换 (bs, c, hw) -> (hw, bs, c)?
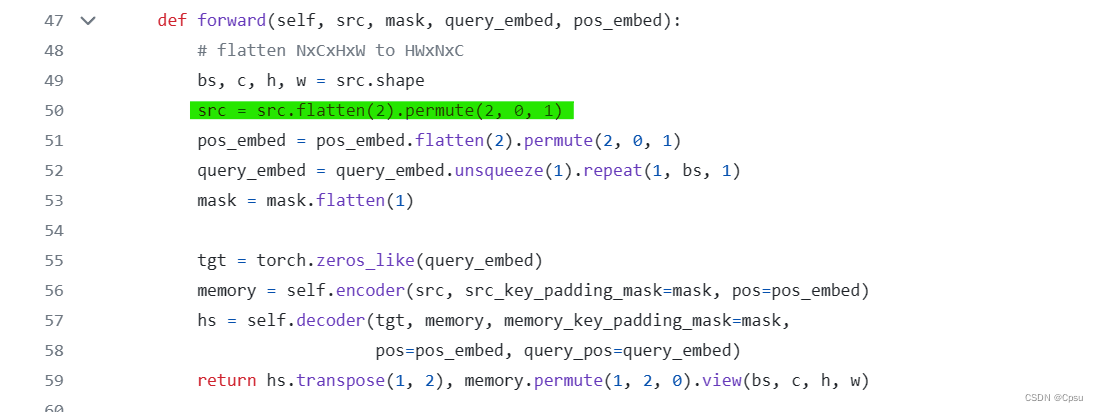
这里只是一个小细节,当初发现这里和ViT等论文的Encoder输入不太一样,不明白为什么要多此一举进行维度变换。这里其实是pytorch中注意力实现的一个不同,在源码中的文档中写的很清楚,pytorch中的transformer实现有一个batch_first=False的参数,也就是默认传入的第一个维度不是batch_size,所以才要进行一个维度变换。
References
DETR预训练模型










![[足式机器人]Part4 南科大高等机器人控制课 Ch08 Rigid Body Dynamics](https://img-blog.csdnimg.cn/direct/1677268e1f9f4a919827801b77b5c093.png)

