u-boot-2013.01移植
【实验目的】
了解u-boot 的代码结构及移植的基本方法
【实验环境】
- ubuntu 14.04发行版
- FS4412实验平台
- 交叉编译工具arm-none-linux-gnueabi-
【注意事项】
实验步骤中以“$”开头的命令表示在 ubuntu 环境下执行
【实验步骤】
1 建立自己的平台
1.1 下载uboot源码
在uboot官网下载uboot源码(这里我们选择u-boot-2013.01.tar.bz2)
ftp://ftp.denx.de/pub/u-boot/
1.2解压uboot源码
拷贝uboot源码包到ubuntu的家目录下,解压并进入其顶层目录
$ tar xvf u-boot-2013.01.tar.bz2
$ cd u-boot-2013.01/1.3 指定交叉编译工具信息
uboot源码并不知道我们使用的处理器架构及交叉编译工具是什么,这里我们需要自己 在Makefile中指定
$ vi Makefile将
feq ($(HOSTARCH),$(ARCH))
CROSS_COMPILE ?=
endif修改为如下内容(注意后边不要有多余的空格),然后保存退出
ifeq (arm,arm)
CROSS_COMPILE ?= arm-none-linux-gnueabi-
endif1.4 添加Board信息
因为uboot源码并不支持我们的开发板,这里我们需要从源码支持的开发板中找一个硬 件与我们最类似的,在其基础上进行修改,这里我们参考的是samsung公司的origen
$ cp -rf board/samsung/origen/ board/samsung/fs4412
$ mv board/samsung/fs4412/origen.c board/samsung/fs4412/fs4412.c因为修改了文件名,所以对应的Makefile也要修改
$ vi board/samsung/fs4412/Makefile将
ifndef CONFIG_SPL_BUILD
COBJS += origen.o
endif修改为如下内容,然后保存退出
ifndef CONFIG_SPL_BUILD
COBJS += fs4412.o
endif拷贝origen相关的头文件并将其重命名
$ cp include/configs/origen.h include/configs/fs4412.h修改文件中的信息
$ vi include/configs/fs4412.h将
#define CONFIG_SYS_PROMPT "ORIGEN #"修改为如下内容
#define CONFIG_SYS_PROMPT "fs4412 #"再将
#define CONFIG_IDENT_STRING " for ORIGEN"修改为如下内容,然后保存退出。这块影响的是启动打印信息
#define CONFIG_IDENT_STRING "for fs4412"打开uboot源码顶层目录下的boards.cfg文件
$ vi boards.cfg在
origen arm armv7 origen samsung exynos后添加如下内容(FS4412的相关信息),然后保存退出。
fs4412 arm armv7 fs4412 samsung exynos至此我们在uboot源码中给我们的板子添加了“档案”,源码就支持我们的开发板了
1.5 编译uboot
在uboot源码顶层目录下执行如下命令,指定当前使用的Board信息
$ make fs4412_config编译uboot
$ make编译完成后会在源码顶层目录下生成u-boot.bin文件,但该文件还不能在我们的开发板 上运行,因为以上操作我们只是把origen相关的文件的名字改成了fs4412,使uboot能 识别fs4412开发板,但文件中的代码还是origen的,和我们的开发板不匹配,所以我 们还需要进一步进行修改和配置
2 添加三星加密引导方式
考虑芯片启动的安全性,Exynos4412需要三星提供的初始引导加密后我们的u-boot才 能被引导运行,所以我们需要在uboot源码中添加三星提供的加密处理代码。(uboot是开源的,所以很多厂家为了安全性采用了加密引导)
2.1 添加三星加密引导方式
将资料中“移植相关文件”下的sdfuse_q和CodeSign4SecureBoot目录拷贝到uboot源 码的顶层目录下(这之后不要执行make clean或make distclean,这会将加密文件清除)

因为添加的加密文件也要编译,所以对应的Makefile也要修改
$ vi Makefile 在
$(obj)u-boot.bin: $(obj)u-boot
$(OBJCOPY)${OBJCFLAGS} -O binary $< $@
$(BOARD_SIZE_CHECK)后添加如下内容(添加的内容需要tab键缩进,否则编译报错),然后保存退出
@#./mkuboot
@split -b 14336 u-boot.bin bl2
@+make -C sdfuse_q/
@#cp u-boot.bin u-boot-4212.bin
@#cp u-boot.bin u-boot-4412.bin
@#./sdfuse_q/add_sign
@./sdfuse_q/chksum
@./sdfuse_q/add_padding
@rm bl2a*
@echo2.2 添加调试代码(点灯法)
很多时候我们不确定uboot是否已经在板子上运行,所以我们在uboot源码中添加一段 代码使板子上的LED点亮,这样如果看到LED亮的话就表示uboot已经在运行了
打开uboot启动后的第一段代码
$ vi arch/arm/cpu/armv7/start.S在第134行后添加如下代码(即点亮LED2),然后保存退出
ldr r0, =0x11000c40
ldr r1, [r0]
bic r1, r1, #0xf0000000
orr r1, r1, #0x10000000
str r1, [r0]
ldr r0, =0x11000c44
mov r1, #0xff
str r1, [r0]2.3 添加编译脚本
使用make命令编译时只链接uboot源码中的相关代码,而我们添加的初始引导加密的 代码不会被连接到u-boot.bin中,所以这里我们自己编写编译脚本build.sh,这个脚本 中除了对uboot源码进行配置和编译外还将初始引导加密代码链接到了u-boot.bin上, 最终生成一个完成的uboot镜像u-boot-fs4412.bin
将资料中“移植相关文件”下的build.sh拷贝到uboot源码的顶层目录下

给编译脚本添加可执行权限
$ chmod 777 build.shbuild.sh中内容主要是实现make fs4412_config 和make -j 多核数
 把三星的引导文件合并为了u-boot-fs4412.bin(不需要过多了解)
把三星的引导文件合并为了u-boot-fs4412.bin(不需要过多了解)
2.4 编译uboot
通过脚本编译uboot源码
$ ./build.sh编译完成后在源码的顶层目录下会生成“u-boot-fs4412.bin”
 2.5 测试uboot
2.5 测试uboot
参照之前的实验将生成的u-boot-fs4412.bin烧写到SD卡中,开发板选择SD卡启动, 然后上电查看现象,若LED2点亮则说明我自己移植的u-boot已经能够被加载运行
3 实现串口输出
虽然uboot已经能在开发板上加载运行,但是此时的uboot还不能在终端上打印信息, 原因在于uboot源码中对UART的配置与我们实际的硬件不匹配
3.1 修改UART源码
$ vi board/samsung/fs4412/lowlevel_init.S在
lowlevel_init:后添加如下内容(初始化临时栈)
dr sp,=0x02060000在
beq wakeup_reset后添加如下内容(关闭看门狗)
#if 1
ldr r0, =0x1002330c
ldr r1, [r0]
orr r1, r1, #0x300
str r1, [r0]
ldr r0, =0x11000c08
ldr r1, =0x0
str r1, [r0]
/* Clear MASK_WDT_RESET_REQUEST */
ldr r0, =0x1002040c
ldr r1, =0x00
str r1, [r0]
#endif在
uart_asm_init:
/* setup UART0-UART3 GPIOs (part1) */
mov r0, r7
ldr r1, =EXYNOS4_GPIO_A0_CON_VAL
str r1, [r0, #EXYNOS4_GPIO_A0_CON_OFFSET]
ldr r1, =EXYNOS4_GPIO_A1_CON_VAL
str r1, [r0, #EXYNOS4_GPIO_A1_CON_OFFSET]后添加如下内容(UART初始化)
ldr r0, =0x10030000
ldr r1, =0x666666
ldr r2, =CLK_SRC_PERIL0_OFFSET
str r1, [r0, r2]
ldr r1, =0x777777
ldr r2, =CLK_DIV_PERIL0_OFFSET
str r1, [r0, r2]注释掉
bl uart_asm_init后的一条语句,然后保存退出
#if 0
bl tzpc_init
#endif3.2 编译uboot
通过脚本编译uboot源码
$ ./build.sh3.3 测试uboot
参照之前的实验将生成的u-boot-fs4412.bin烧写到SD卡中,开发板选择SD卡启动, 然后上电查看现象,若终端有打印信息则说明UART移植成功

4 网卡移植
虽然可以通过终端输入命令,但此时的uboot还不能使用ping、tftp等命令,原因在于 命令都是操作网络的,而uboot源码中网卡的相关配置与我们当前的板子不匹配,所以 我们还要对网卡进行移植
4.1 修改网络初始化代码
$ vi board/samsung/fs4412/fs4412.c在
struct exynos4_gpio_part2 *gpio2;后添加如下内容
#ifdef CONFIG_DRIVER_DM9000
#define EXYNOS4412_SROMC_BASE 0X12570000
#define DM9000_Tacs (0x1)
#define DM9000_Tcos (0x1)
#define DM9000_Tacc (0x5)
#define DM9000_Tcoh (0x1)
#define DM9000_Tah (0xC)
#define DM9000_Tacp (0x9)
#define DM9000_PMC (0x1)
struct exynos_sromc {
unsigned int bw;
unsigned int bc[6];
};
void exynos_config_sromc(u32 srom_bank, u32 srom_bw_conf, u32 srom_bc_conf)
{
unsigned int tmp;
struct exynos_sromc *srom = (struct exynos_sromc *)(EXYNOS4412_SROMC_BASE);
/* Configure SMC_BW register to handle proper SROMC bank */
tmp = srom->bw;
tmp &= ~(0xF << (srom_bank * 4));
tmp |= srom_bw_conf;
srom->bw = tmp;
/* Configure SMC_BC register */
srom->bc[srom_bank] = srom_bc_conf;
}
static void dm9000aep_pre_init(void)
{
unsigned int tmp;
unsigned char smc_bank_num = 1;
unsigned int smc_bw_conf=0;
unsigned int smc_bc_conf=0;
/* gpio configuration */
writel(0x00220020, 0x11000000 + 0x120);
writel(0x00002222, 0x11000000 + 0x140);
/* 16 Bit bus width */
writel(0x22222222, 0x11000000 + 0x180);
writel(0x0000FFFF, 0x11000000 + 0x188);
writel(0x22222222, 0x11000000 + 0x1C0);
writel(0x0000FFFF, 0x11000000 + 0x1C8);
writel(0x22222222, 0x11000000 + 0x1E0);
writel(0x0000FFFF, 0x11000000 + 0x1E8);
smc_bw_conf &= ~(0xf<<4);
smc_bw_conf |= (1<<7) | (1<<6) | (1<<5) | (1<<4);
smc_bc_conf = ((DM9000_Tacs << 28)
| (DM9000_Tcos << 24)
| (DM9000_Tacc << 16)
| (DM9000_Tcoh << 12)
| (DM9000_Tah << 8)
| (DM9000_Tacp << 4)
| (DM9000_PMC));
exynos_config_sromc(smc_bank_num,smc_bw_conf,smc_bc_conf);
}
#endif在
gd->bd->bi_boot_params = (PHYS_SDRAM_1 + 0x100UL);后添加如下内容
#ifdef CONFIG_DRIVER_DM9000
dm9000aep_pre_init();
#endif在文件末尾添加如下内容,然后保存退出
#ifdef CONFIG_CMD_NET
int board_eth_init(bd_t *bis)
{
int rc = 0;
#ifdef CONFIG_DRIVER_DM9000
rc = dm9000_initialize(bis);
#endif
return rc;
}
#endif4.2 修改网络配置代码
$ vi include/configs/fs4412.h将
#undef CONFIG_CMD_PING修改为
#define CONFIG_CMD_PING再将
#undef CONFIG_CMD_NET修改为
#define CONFIG_CMD_NET在文件末尾
#endif /* __CONFIG_H */前添加如下内容,然后保存退出
#ifdef CONFIG_CMD_NET
#define CONFIG_NET_MULTI
#define CONFIG_DRIVER_DM9000 1
#define CONFIG_DM9000_BASE 0x05000000
#define DM9000_IO CONFIG_DM9000_BASE
#define DM9000_DATA (CONFIG_DM9000_BASE + 4)
#define CONFIG_DM9000_USE_16BIT
#define CONFIG_DM9000_NO_SROM 1
#define CONFIG_ETHADDR 11:22:33:44:55:66
#define CONFIG_IPADDR 192.168.9.200
#define CONFIG_SERVERIP 192.168.9.120
#define CONFIG_GATEWAYIP 192.168.9.1
#define CONFIG_NETMASK 255.255.255.0
#endif4.3 编译uboot
通过脚本编译uboot源码
$ ./build.sh4.4 测试uboot
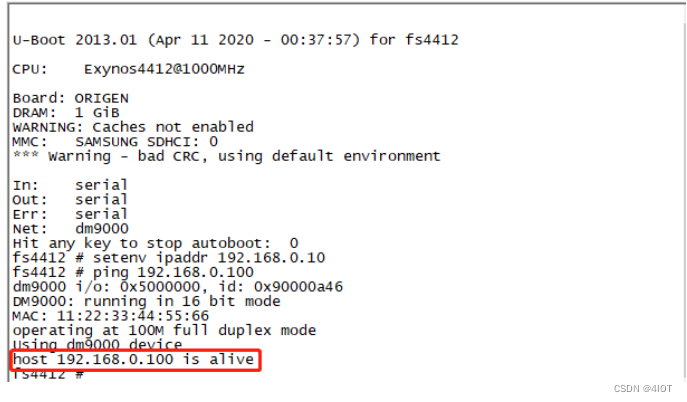
参照之前的实验将生成的u-boot-fs4412.bin烧写到SD卡中,开发板选择SD卡启动, 然后上电查看现象;设置好相关的环境变量,使用网线连接开发板与开发主机,使用 ping命令连接ubuntu,若显示“host xxx.xxx.xxx.xxx is alive”则表示网卡移植成功
5 EMMC移植
因为uboot源码中对EMMC的配置与我们的板子不匹配,这里还需要对EMMC相关的 代码进行修改和配置
5.1 修改EMMC初始化代码
将资料中“移植相关文件”下的movi.c拷贝到uboot源码的arch/arm/cpu/armv7/exynos/ 目录下
 因为添加的新文件也要编译,所以对应的Makefile也要修改
因为添加的新文件也要编译,所以对应的Makefile也要修改
$ vi arch/arm/cpu/armv7/exynos/Makefile将
COBJS += clock.o power.o soc.o system.o pinmux.o修改为如下内容,然后保存退出
COBJS += clock.o power.o soc.o system.o pinmux.o movi.o修改板级文件
$ vi board/samsung/fs4412/fs4412.c在
#include <asm/arch/mmc.h>后添加如下内容
#include <asm/arch/clk.h>
#include "origen_setup.h"在
#ifdef CONFIG_GENERIC_MMC后添加如下内容
u32 sclk_mmc4; /*clock source for emmc controller*/
#define __REGMY(x) (*((volatile u32 *)(x)))
#define CLK_SRC_FSYS __REGMY(EXYNOS4_CLOCK_BASE + CLK_SRC_FSYS_OFFSET)
#define CLK_DIV_FSYS3 __REGMY(EXYNOS4_CLOCK_BASE + CLK_DIV_FSYS3_OFFSET)
int emmc_init()
{
u32 tmp;
u32 clock;
u32 i;
/* setup_hsmmc_clock */
/* MMC4 clock src = SCLKMPLL */
tmp = CLK_SRC_FSYS & ~(0x000f0000);
CLK_SRC_FSYS = tmp | 0x00060000;
/* MMC4 clock div */
tmp = CLK_DIV_FSYS3 & ~(0x0000ff0f);
clock = get_pll_clk(MPLL)/1000000;
for(i=0 ; i<=0xf; i++) {
sclk_mmc4=(clock/(i+1));
if(sclk_mmc4 <= 160) //200
{
CLK_DIV_FSYS3 = tmp | (i<<0);
break;
}
}
emmcdbg("[mjdbg] sclk_mmc4:%d MHZ; mmc_ratio: %d\n",sclk_mmc4,i);
sclk_mmc4 *= 1000000;
/*
* MMC4 EMMC GPIO CONFIG
*
* GPK0[0] SD_4_CLK
* GPK0[1] SD_4_CMD
* GPK0[2] SD_4_CDn
* GPK0[3:6] SD_4_DATA[0:3]
*/
writel(readl(0x11000048)&~(0xf),0x11000048); //SD_4_CLK/SD_4_CMD pull-down enable
writel(readl(0x11000040)&~(0xff),0x11000040);//cdn set to be output
writel(readl(0x11000048)&~(3<<4),0x11000048); //cdn pull-down disable
writel(readl(0x11000044)&~(1<<2),0x11000044); //cdn output 0 to shutdown the emmc power
writel(readl(0x11000040)&~(0xf<<8)|(1<<8),0x11000040);//cdn set to be output
udelay(100*1000);
writel(readl(0x11000044)|(1<<2),0x11000044); //cdn output 1
writel(0x03333133, 0x11000040);
writel(0x00003FF0, 0x11000048);
writel(0x00002AAA, 0x1100004C);
#ifdef CONFIG_EMMC_8Bit
writel(0x04444000, 0x11000060);
writel(0x00003FC0, 0x11000068);
writel(0x00002AAA, 0x1100006C);
#endif
#ifdef USE_MMC4
smdk_s5p_mshc_init();
#endif
}将board_mmc_init函数中的内容修改为(之前的内容删除即可)如下内容
int board_mmc_init(bd_t *bis)
{
int i, err;
#ifdef CONFIG_EMMC
err = emmc_init();
#endif
return err;
}在文件的最末尾添加如下内容,然后保存退出
#ifdef CONFIG_BOARD_LATE_INIT
#include <movi.h>
int chk_bootdev(void)//mj for boot device check
{
char run_cmd[100];
struct mmc *mmc;
int boot_dev = 0;
int cmp_off = 0x10;
ulong start_blk, blkcnt;
mmc = find_mmc_device(0);
if (mmc == NULL)
{
printf("There is no eMMC card, Booting device is SD card\n");
boot_dev = 1;
return boot_dev;
}
start_blk = (24*1024/MOVI_BLKSIZE);
blkcnt = 0x10;
sprintf(run_cmd,"emmc open 0");
run_command(run_cmd, 0);
sprintf(run_cmd,"mmc read 0 %lx %lx %lx",CFG_PHY_KERNEL_BASE,start_blk,blkcnt);
run_command(run_cmd, 0);
/* switch mmc to normal paritition */
sprintf(run_cmd,"emmc close 0");
run_command(run_cmd, 0);
return 0;
}
int board_late_init (void)
{
int boot_dev =0 ;
char boot_cmd[100];
boot_dev = chk_bootdev();
if(!boot_dev)
{
printf("\n\nChecking Boot Mode ... EMMC4.41\n");
}
return 0;
}
#endif5.2 添加EMMC命令
将资料中“移植相关文件”下的cmd_movi.c、cmd_mmc.c、cmd_mmc_fdisk.c拷贝到uboot 源码的common/目录下

因为添加的新文件也要编译,所以对应的Makefile也要修改
$ vi common/Makefile在
COBJS-$(CONFIG_CMD_MMC) += cmd_mmc.o后添加如下内容,然后保存退出
COBJS-$(CONFIG_CMD_MMC) += cmd_mmc_fdisk.o
COBJS-$(CONFIG_CMD_MOVINAND) += cmd_movi.o将资料中“移植相关文件”下的mmc.c、s5p_mshc.c拷贝到uboot源码的drivers/mmc/ 目录下
将资料中“移植相关文件”下的mmc.h、movi.h、s5p_mshc.h拷贝到uboot源码的include/ 目录下
因为添加的新文件也要编译,所以对应的Makefile也要修改
$ vi drivers/mmc/Makefile在
COBJS-$(CONFIG_S5P_SDHCI) += s5p_sdhci.o后添加如下内容,然后保存退出
COBJS-$(CONFIG_S5P_MSHC) += s5p_mshc.o5.3 修改EMMC配置代码
$ vi include/configs/fs4412.h在文件的末尾
#endif /* __CONFIG_H */前添加如下内容,然后保存退出
#define CONFIG_EVT1 1 /* EVT1 */
#ifdef CONFIG_EVT1
#define CONFIG_EMMC44_CH4 //eMMC44_CH4 (OMPIN[5:1] = 4)
#ifdef CONFIG_SDMMC_CH2
#define CONFIG_S3C_HSMMC
#undef DEBUG_S3C_HSMMC
#define USE_MMC2
#endif
#ifdef CONFIG_EMMC44_CH4
#define CONFIG_S5P_MSHC
#define CONFIG_EMMC 1
#define USE_MMC4
/* #define CONFIG_EMMC_8Bit */
#define CONFIG_EMMC_EMERGENCY
/*#define emmcdbg(fmt,args...) printf(fmt ,##args) */
#define emmcdbg(fmt,args...)
#endif
#endif /*end CONFIG_EVT1*/
#define CONFIG_CMD_MOVINAND
#define CONFIG_CLK_1000_400_200
#define CFG_PHY_UBOOT_BASE CONFIG_SYS_SDRAM_BASE + 0x3e00000
#define CFG_PHY_KERNEL_BASE CONFIG_SYS_SDRAM_BASE + 0x8000
#define BOOT_MMCSD 0x3
#define BOOT_EMMC43 0x6
#define BOOT_EMMC441 0x7
#define CONFIG_BOARD_LATE_INIT5.4 编译uboot
通过脚本编译uboot源码
$ ./build.sh5.5 测试uboot
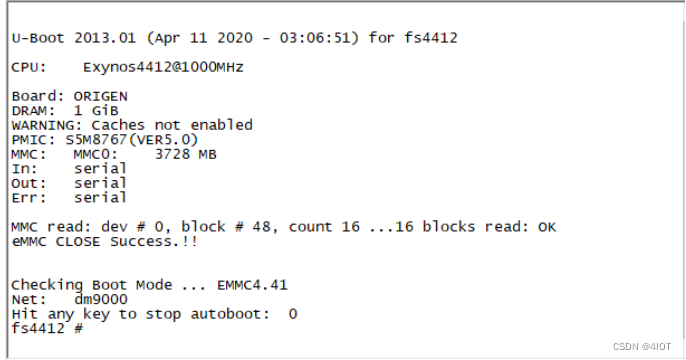
参照之前的实验将生成的u-boot-fs4412.bin烧写到SD卡中,开发板选择SD卡启动, 然后上电查看现象;若显示EMMC的相关信息则表示EMMC移植成功

6 电源管理移植
因为uboot源码中对电源管理芯片的配置与我们的板子不匹配,后续有可能会导致内核 启动卡死,这里还需要对电源管理芯片相关的代码进行修改和配置
6.1 修改电源管理相关代码
将资料中“移植相关文件”下的pmic_s5m8767.c拷贝到uboot源码的drivers/power/pmic/ 目录下
因为添加的新文件也要编译,所以对应的Makefile也要修改
$ vi drivers/power/pmic/Makefile在
COBJS-$(CONFIG_POWER_MAX77686) += pmic_max77686.o后添加如下内容,然后保存退出
COBJS-$(CONFIG_POWER_S5M8767) += pmic_s5m8767.o将添加的函数在头文件中声明
$ vi include/power/pmic.h在
int pmic_set_output(struct pmic *p, u32 reg, int ldo, int on);后添加如下内容,然后保存退出
void pmic_s5m8767_init(void);修改配置文件
$ vi include/configs/fs4412.h在文件末尾
#endif /* __CONFIG_H */前添加如下内容,然后保存退出
#define CONFIG_POWER_S5M8767修改板级文件
$ vi board/samsung/fs4412/fs4412.c在board_init函数中
#ifdef CONFIG_DRIVER_DM9000
dm9000aep_pre_init();
#endif后添加如下内容,然后保存退出
#ifdef CONFIG_POWER_S5M8767
pmic_s5m8767_init();
#endif注释原有的代码
$ vi drivers/power/Makefile将
COBJS-$(CONFIG_POWER) += power_core.o修改为(即注释掉)
#COBJS-$(CONFIG_POWER) += power_core.o修改架构文件
$ vi arch/arm/cpu/armv7/s5p-common/cpu_info.c在
#include <asm/arch/clk.h>后添加如下内容,然后保存退出
#include <power/pmic.h>6.2 编译uboot
通过脚本编译uboot源码
$ ./build.sh6.3 测试uboot
参照之前的实验将生成的u-boot-fs4412.bin烧写到SD卡中,开发板选择SD卡启动,然后上电查看现象
至此,uboot移植完成