ZYNQ 7020显示 图片 实验
关键配置 BRAM
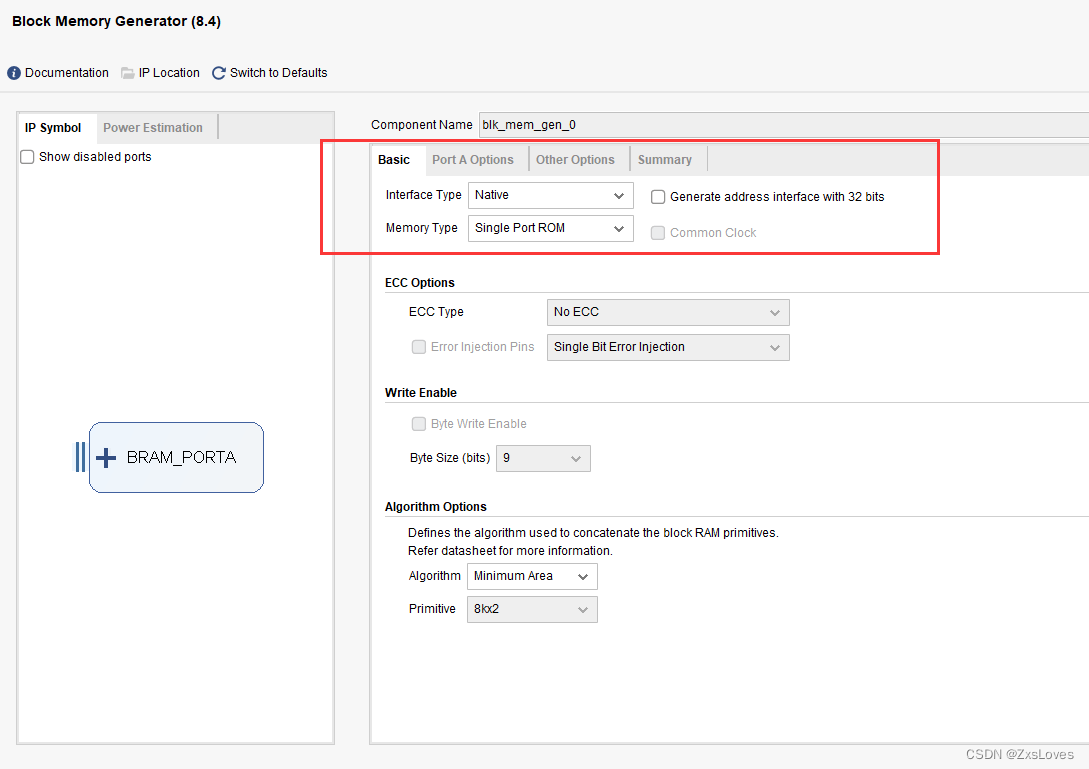
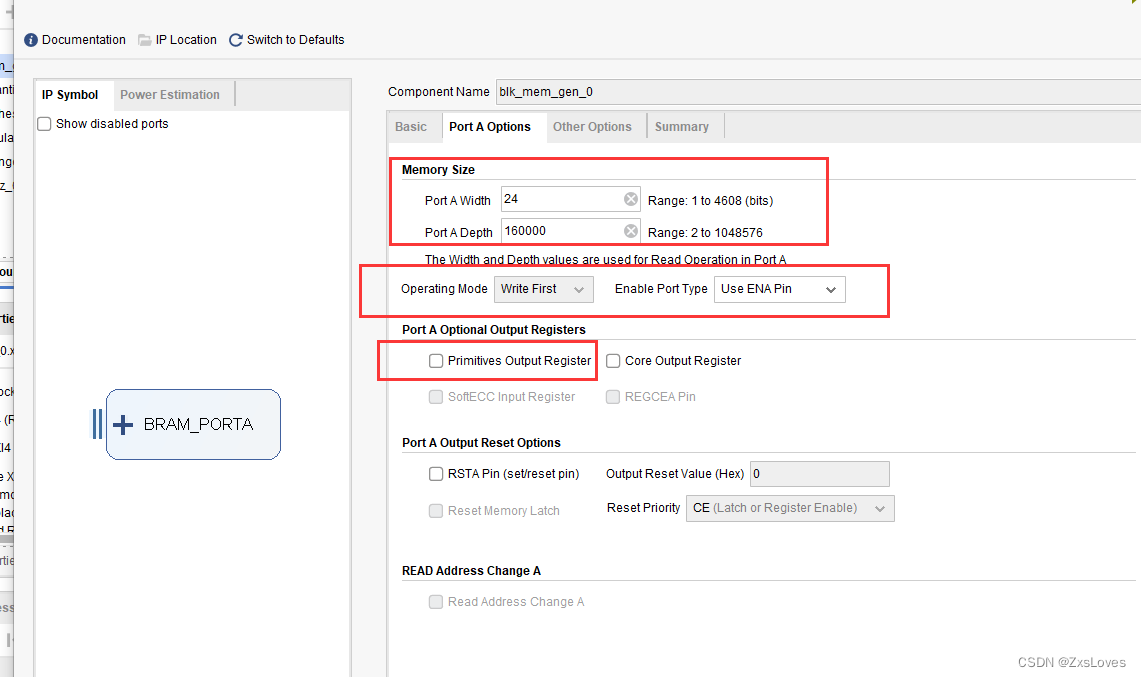
因为本次 我想显示的 图片是 400*400 所以在 内部 的 ROM 存储单元选择 了160000
ZYNQ7020的内部资源 最多是 大概 200000左右的 大小 大家可以根据 资源选择合适的像素
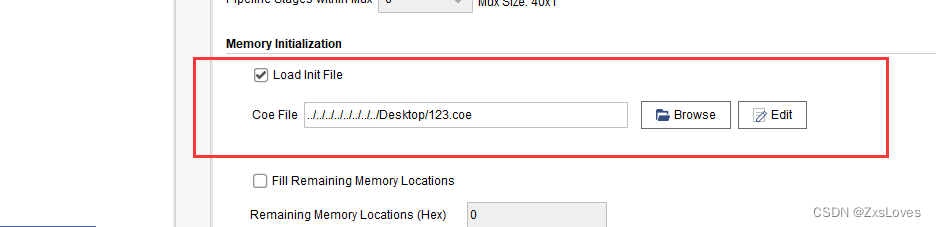
此处存放 内部的 图片转文字的COE文件
PLL设置
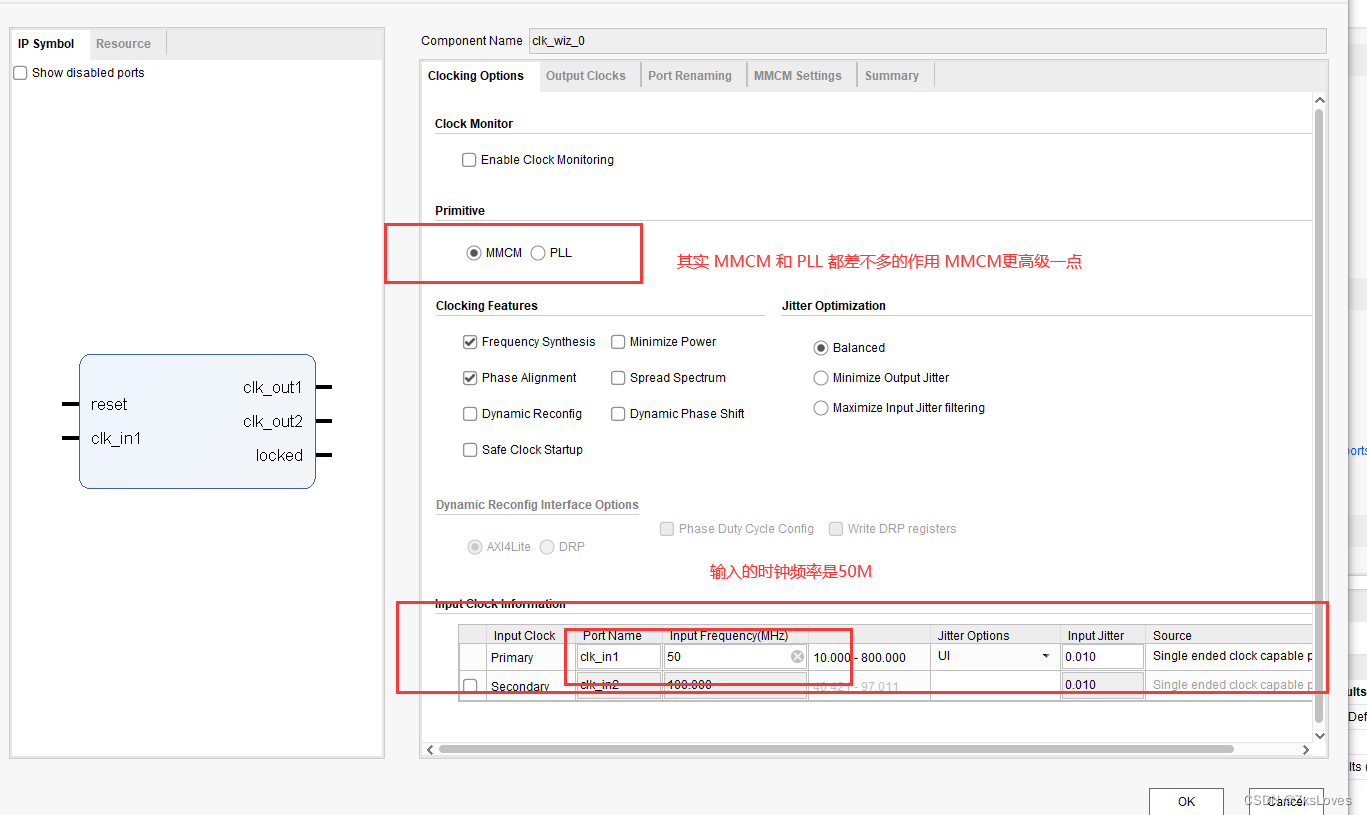
我选用的是按照720p 的 标准
之前准备做最大的1080P 发现 超出资源上限了

下面展示 整个的代码
注意 大部分代码 和 上一节是一样的
主要是 在显示 display 的时候 严格注意 宽度和高度 我一开始没设置对 出现了 图片显示 不正确的状况
dvi_transmitter_top.v
module dvi_transmitter_top(
input pclk ,
input sys_rst_n ,
input pclk_x5 ,
input video_hsync ,
input video_vsync ,
input video_de ,
input [23 : 0] video_din ,
output tmds_clk_p ,
output tmds_clk_n ,
output [2 : 0] tmds_data_p ,
output [2 : 0] tmds_data_n ,
output tmds_oen
);
assign tmds_oen = 1 ;
// next is define
wire reset ;
wire [9:0] blue_10bit ;
wire [9:0] green_10bit ;
wire [9:0] red_10bit ;
wire [2:0] tmds_data_serial ;
wire tmds_clk_serial ;
reset_syn u_reset_syn(
.pclk ( pclk ),
.reset_n ( sys_rst_n ),
.reset ( reset )
);
dvi_encoder u_dvi_encoder_blue(
.clkin ( pclk ),
.rstin ( reset ),
.din ( video_din[7:0] ),
.c0 ( video_hsync ),
.c1 ( video_vsync ),
.de ( video_de ),
.dout ( blue_10bit )
);
dvi_encoder u_dvi_encoder_green(
.clkin ( pclk ),
.rstin ( reset ),
.din ( video_din[15:8] ),
.c0 ( 1'b0 ),
.c1 ( 1'b0 ),
.de ( video_de ),
.dout ( green_10bit )
);
dvi_encoder u_dvi_encoder_red(
.clkin ( pclk ),
.rstin ( reset ),
.din ( video_din[23:16] ),
.c0 ( 1'b0 ),
.c1 ( 1'b0 ),
.de ( video_de ),
.dout ( red_10bit )
);
serializer10 u_serializer10_blue(
.reset ( reset ),
.paralell_clk ( pclk ),
.serial_clk_5x ( pclk_x5 ),
.paralell_data ( blue_10bit ),
.serial_data_out ( tmds_data_serial[0] )
);
serializer10 u_serializer10_green(
.reset ( reset ),
.paralell_clk ( pclk ),
.serial_clk_5x ( pclk_x5 ),
.paralell_data ( green_10bit ),
.serial_data_out ( tmds_data_serial[1] )
);
serializer10 u_serializer10_red(
.reset ( reset ),
.paralell_clk ( pclk ),
.serial_clk_5x ( pclk_x5 ),
.paralell_data ( red_10bit ),
.serial_data_out ( tmds_data_serial[2] )
);
serializer10 u_serializer10_clk(
.reset ( reset ),
.paralell_clk ( pclk ),
.serial_clk_5x ( pclk_x5 ),
.paralell_data ( 10'b1111100000 ),
.serial_data_out ( tmds_clk_serial )
);
//转换差分信号
OBUFDS #(
.IOSTANDARD ("TMDS_33") // I/O电平标准为TMDS
) TMDS0 (
.I (tmds_data_serial[0]),
.O (tmds_data_p[0]),
.OB (tmds_data_n[0])
);
OBUFDS #(
.IOSTANDARD ("TMDS_33") // I/O电平标准为TMDS
) TMDS1 (
.I (tmds_data_serial[1]),
.O (tmds_data_p[1]),
.OB (tmds_data_n[1])
);
OBUFDS #(
.IOSTANDARD ("TMDS_33") // I/O电平标准为TMDS
) TMDS2 (
.I (tmds_data_serial[2]),
.O (tmds_data_p[2]),
.OB (tmds_data_n[2])
);
OBUFDS #(
.IOSTANDARD ("TMDS_33") // I/O电平标准为TMDS
) TMDS3 (
.I (tmds_clk_serial),
.O (tmds_clk_p),
.OB (tmds_clk_n)
);
endmodule
encoder.v
module dvi_encoder (
input clkin, // pixel clock input
input rstin, // async. reset input (active high)
input [7:0] din, // data inputs: expect registered
input c0, // c0 input
input c1, // c1 input
input de, // de input
output reg [9:0] dout // data outputs
);
// Counting number of 1s and 0s for each incoming pixel
// component. Pipe line the result.
// Register Data Input so it matches the pipe lined adder
// output
reg [3:0] n1d; //number of 1s in din
reg [7:0] din_q;
//计算像素数据中“1”的个数
always @ (posedge clkin) begin
n1d <=#1 din[0] + din[1] + din[2] + din[3] + din[4] + din[5] + din[6] + din[7];
din_q <=#1 din;
end
///
// Stage 1: 8 bit -> 9 bit
// Refer to DVI 1.0 Specification, page 29, Figure 3-5
///
wire decision1;
assign decision1 = (n1d > 4'h4) | ((n1d == 4'h4) & (din_q[0] == 1'b0));
wire [8:0] q_m;
assign q_m[0] = din_q[0];
assign q_m[1] = (decision1) ? (q_m[0] ^~ din_q[1]) : (q_m[0] ^ din_q[1]);
assign q_m[2] = (decision1) ? (q_m[1] ^~ din_q[2]) : (q_m[1] ^ din_q[2]);
assign q_m[3] = (decision1) ? (q_m[2] ^~ din_q[3]) : (q_m[2] ^ din_q[3]);
assign q_m[4] = (decision1) ? (q_m[3] ^~ din_q[4]) : (q_m[3] ^ din_q[4]);
assign q_m[5] = (decision1) ? (q_m[4] ^~ din_q[5]) : (q_m[4] ^ din_q[5]);
assign q_m[6] = (decision1) ? (q_m[5] ^~ din_q[6]) : (q_m[5] ^ din_q[6]);
assign q_m[7] = (decision1) ? (q_m[6] ^~ din_q[7]) : (q_m[6] ^ din_q[7]);
assign q_m[8] = (decision1) ? 1'b0 : 1'b1;
/
// Stage 2: 9 bit -> 10 bit
// Refer to DVI 1.0 Specification, page 29, Figure 3-5
/
reg [3:0] n1q_m, n0q_m; // number of 1s and 0s for q_m
always @ (posedge clkin) begin
n1q_m <=#1 q_m[0] + q_m[1] + q_m[2] + q_m[3] + q_m[4] + q_m[5] + q_m[6] + q_m[7];
n0q_m <=#1 4'h8 - (q_m[0] + q_m[1] + q_m[2] + q_m[3] + q_m[4] + q_m[5] + q_m[6] + q_m[7]);
end
parameter CTRLTOKEN0 = 10'b1101010100;
parameter CTRLTOKEN1 = 10'b0010101011;
parameter CTRLTOKEN2 = 10'b0101010100;
parameter CTRLTOKEN3 = 10'b1010101011;
reg [4:0] cnt; //disparity counter, MSB is the sign bit
wire decision2, decision3;
assign decision2 = (cnt == 5'h0) | (n1q_m == n0q_m);
/
// [(cnt > 0) and (N1q_m > N0q_m)] or [(cnt < 0) and (N0q_m > N1q_m)]
/
assign decision3 = (~cnt[4] & (n1q_m > n0q_m)) | (cnt[4] & (n0q_m > n1q_m));
// pipe line alignment
reg de_q, de_reg;
reg c0_q, c1_q;
reg c0_reg, c1_reg;
reg [8:0] q_m_reg;
always @ (posedge clkin) begin
de_q <=#1 de;
de_reg <=#1 de_q;
c0_q <=#1 c0;
c0_reg <=#1 c0_q;
c1_q <=#1 c1;
c1_reg <=#1 c1_q;
q_m_reg <=#1 q_m;
end
///
// 10-bit out
// disparity counter
///
always @ (posedge clkin or posedge rstin) begin
if(rstin) begin
dout <= 10'h0;
cnt <= 5'h0;
end else begin
if (de_reg) begin
if(decision2) begin
dout[9] <=#1 ~q_m_reg[8];
dout[8] <=#1 q_m_reg[8];
dout[7:0] <=#1 (q_m_reg[8]) ? q_m_reg[7:0] : ~q_m_reg[7:0];
cnt <=#1 (~q_m_reg[8]) ? (cnt + n0q_m - n1q_m) : (cnt + n1q_m - n0q_m);
end else begin
if(decision3) begin
dout[9] <=#1 1'b1;
dout[8] <=#1 q_m_reg[8];
dout[7:0] <=#1 ~q_m_reg[7:0];
cnt <=#1 cnt + {q_m_reg[8], 1'b0} + (n0q_m - n1q_m);
end else begin
dout[9] <=#1 1'b0;
dout[8] <=#1 q_m_reg[8];
dout[7:0] <=#1 q_m_reg[7:0];
cnt <=#1 cnt - {~q_m_reg[8], 1'b0} + (n1q_m - n0q_m);
end
end
end else begin
case ({c1_reg, c0_reg})
2'b00: dout <=#1 CTRLTOKEN0;
2'b01: dout <=#1 CTRLTOKEN1;
2'b10: dout <=#1 CTRLTOKEN2;
default: dout <=#1 CTRLTOKEN3;
endcase
cnt <=#1 5'h0;
end
end
end
endmodule
reset_syn.v
module reset_syn(
input pclk ,
input reset_n ,
output reg reset
);
reg reset1 ;
always@( posedge pclk or negedge reset_n)
begin
if( reset_n == 0)
begin
reset1 <= 1 ;
end
else
begin
reset1 <= 0 ;
reset <= reset1 ;
end
end
endmodule
serializer.v
module serializer10 (
input reset , // 复位,高有效
input paralell_clk , // 输入并行数据时钟
input serial_clk_5x , // 输入串行数据时钟
input [9 : 0] paralell_data , // 输入并行数据
output serial_data_out // 输出串行数据
);
//wire define
wire cascade1 ; //用于两个 OSERDESE2 级联的信号
wire cascade2 ;
// 此处的代码 来自 vivado的 原语 和 正点原子的同时调配
// 这是 master接口
OSERDESE2 #(
.DATA_RATE_OQ("DDR"), // 设置双倍数据速率
.DATA_RATE_TQ("DDR"), // DDR, BUF, SDR
.DATA_WIDTH(10), // 输入的并行数据宽度为 10bit
// .INIT_OQ(1'b0), // Initial value of OQ output (1'b0,1'b1)
// .INIT_TQ(1'b0), // Initial value of TQ output (1'b0,1'b1)
.SERDES_MODE("MASTER"), // MASTER, SLAVE
//.SRVAL_OQ(1'b0), // OQ output value when SR is used (1'b0,1'b1)
// .SRVAL_TQ(1'b0), // TQ output value when SR is used (1'b0,1'b1)
.TBYTE_CTL("FALSE"), // Enable tristate byte operation (FALSE, TRUE)
.TBYTE_SRC("FALSE"), // Tristate byte source (FALSE, TRUE)
.TRISTATE_WIDTH(1) // 3-state converter width (1,4)
)
OSERDESE2_MASTER (
.OFB(), // 未使用
.OQ(serial_data_out), // 串行输出数据
// SHIFTOUT1 / SHIFTOUT2: 1-bit (each) output: Data output expansion (1-bit each)
.SHIFTOUT1(), // SHIFTIN1 用于位宽扩展
.SHIFTOUT2(), // SHIFTIN2 用于位宽扩展
.TBYTEOUT(), // 未使用
.TFB(), // 未使用
.TQ(), // 未使用
.CLK(serial_clk_5x), // 串行数据时钟,5 倍时钟频率
.CLKDIV(paralell_clk), // 并行数据时钟
// D1 - D8: 1-bit (each) input: Parallel data inputs (1-bit each)
.D1(paralell_data[0]),
.D2(paralell_data[1]),
.D3(paralell_data[2]),
.D4(paralell_data[3]),
.D5(paralell_data[4]),
.D6(paralell_data[5]),
.D7(paralell_data[6]),
.D8(paralell_data[7]),
.OCE(1'b1), // 1-bit input: Output data clock enable
.RST(reset), // 1-bit input: Reset
// SHIFTIN1 / SHIFTIN2: 1-bit (each) input: Data input expansion (1-bit each)
.SHIFTIN1(cascade1), // SHIFTIN1 用于位宽扩展
.SHIFTIN2(cascade2), // SHIFTIN2 用于位宽扩展
// T1 - T4: 1-bit (each) input: Parallel 3-state inputs
.T1(1'b0), // 未使用
.T2(1'b0), // 未使用
.T3(1'b0), // 未使用
.T4(1'b0), // 未使用
.TBYTEIN(1'b0), // 未使用
.TCE(1'b0) // 未使用
);
// slave接口
OSERDESE2 #(
.DATA_RATE_OQ("DDR"), // 设置双倍数据速率
.DATA_RATE_TQ("DDR"), // DDR, BUF, SDR
.DATA_WIDTH(10), // 输入的并行数据宽度为 10bit
// .INIT_OQ(1'b0), // Initial value of OQ output (1'b0,1'b1)
// .INIT_TQ(1'b0), // Initial value of TQ output (1'b0,1'b1)
.SERDES_MODE("SLAVE"), // MASTER, SLAVE
//.SRVAL_OQ(1'b0), // OQ output value when SR is used (1'b0,1'b1)
// .SRVAL_TQ(1'b0), // TQ output value when SR is used (1'b0,1'b1)
.TBYTE_CTL("FALSE"), // Enable tristate byte operation (FALSE, TRUE)
.TBYTE_SRC("FALSE"), // Tristate byte source (FALSE, TRUE)
.TRISTATE_WIDTH(1) // 3-state converter width (1,4)
)
OSERDESE2_SLAVE (
.OFB(), // 未使用
.OQ(), // 串行输出数据
// SHIFTOUT1 / SHIFTOUT2: 1-bit (each) output: Data output expansion (1-bit each)
.SHIFTOUT1(cascade1), // SHIFTIN1 用于位宽扩展
.SHIFTOUT2(cascade2), // SHIFTIN2 用于位宽扩展
.TBYTEOUT(), // 未使用
.TFB(), // 未使用
.TQ(), // 未使用
.CLK(serial_clk_5x), // 串行数据时钟,5 倍时钟频率
.CLKDIV(paralell_clk), // 并行数据时钟
// D1 - D8: 1-bit (each) input: Parallel data inputs (1-bit each)
.D1(1'b0),
.D2(1'b0),
.D3(paralell_data[8]),
.D4(paralell_data[9]),
.D5(1'b0),
.D6(1'b0),
.D7(1'b0),
.D8(1'b0),
.OCE(1'b1), // 1-bit input: Output data clock enable
.RST(reset), // 1-bit input: Reset
// SHIFTIN1 / SHIFTIN2: 1-bit (each) input: Data input expansion (1-bit each)
.SHIFTIN1(), // SHIFTIN1 用于位宽扩展
.SHIFTIN2(), // SHIFTIN2 用于位宽扩展
// T1 - T4: 1-bit (each) input: Parallel 3-state inputs
.T1(1'b0), // 未使用
.T2(1'b0), // 未使用
.T3(1'b0), // 未使用
.T4(1'b0), // 未使用
.TBYTEIN(1'b0), // 未使用
.TCE(1'b0) // 未使用
);
endmodule
top.v
module hdmi_top(
input sys_clk,
input sys_rst_n,
output tmds_clk_p, // TMDS 时钟通道
output tmds_clk_n,
output [2:0] tmds_data_p, // TMDS 数据通道
output [2:0] tmds_data_n
);
//wire define
wire pixel_clk;
wire pixel_clk_5x;
wire clk_locked;
wire [10:0] pixel_xpos_w;
wire [10:0] pixel_ypos_w;
wire [23:0] pixel_data_w;
wire video_hs;
wire video_vs;
wire video_de;
wire [23:0] video_rgb;
// next is main code
clk_wiz_0 instance_name
(
// Clock out ports
.clk_out1(pixel_clk), // output clk_out1
.clk_out2(pixel_clk_5x), // output clk_out2
// Status and control signals
.reset(~sys_rst_n), // input reset
.locked(clk_locked), // output locked
// Clock in ports
.clk_in1(sys_clk)
);
video_driver u_video_driver(
.pixel_clk ( pixel_clk ),
.rst_n ( sys_rst_n ),
.pixel_data ( pixel_data_w ),
.video_rgb ( video_rgb ),
.video_hs ( video_hs ),
.video_vs ( video_vs ),
.video_de ( video_de ),
.pixel_xpos ( pixel_xpos_w ),
.pixel_ypos ( pixel_ypos_w )
);
video_display u_video_display(
.pixel_clk ( pixel_clk ),
.sys_rst_n ( sys_rst_n ),
.pixel_xpos_w ( pixel_xpos_w ),
.pixel_ypos_w ( pixel_ypos_w ),
.pixel_data_w ( pixel_data_w )
);
dvi_transmitter_top u_dvi_transmitter_top(
.pclk ( pixel_clk ),
.sys_rst_n ( sys_rst_n & clk_locked ),
.pclk_x5 ( pixel_clk_5x ),
.video_hsync ( video_hs ),
.video_vsync ( video_vs ),
.video_de ( video_de ),
.video_din ( video_rgb ),
.tmds_clk_p ( tmds_clk_p ),
.tmds_clk_n ( tmds_clk_n ),
.tmds_data_p ( tmds_data_p ),
.tmds_data_n ( tmds_data_n ),
.tmds_oen ( )
);
endmodule
video_display.v
module video_display(
input pixel_clk ,
input sys_rst_n ,
input [ 11 : 0 ] pixel_xpos_w ,
input [ 11 : 0 ] pixel_ypos_w ,
output reg [ 23 : 0 ] pixel_data_w
);
//parameter define
localparam PIC_X_START = 11'd10; //图片起始点横坐标
localparam PIC_Y_START = 11'd10; //图片起始点纵坐标
localparam PIC_WIDTH = 11'd395; //图片宽度
localparam PIC_HEIGHT = 11'd400; //图片高度
//棰滆壊
localparam BACK_COLOR = 24'hE0FFFF; //背景色,浅蓝色
localparam CHAR_COLOR = 24'hff0000; //字符颜色,红色
reg [19:0] rom_addr ; //ROM 地址
wire rom_rd_en ; //ROM 读使能信号
wire [23:0] rom_rd_data ;//ROM 数据
always@( posedge pixel_clk or negedge sys_rst_n)
begin
if( sys_rst_n == 0)
begin
pixel_data_w <=BACK_COLOR ;
end
else if( (pixel_xpos_w >= PIC_X_START - 1'b1)
&& (pixel_xpos_w < PIC_X_START + PIC_WIDTH - 1'b1)
&& (pixel_ypos_w >= PIC_Y_START) && (pixel_ypos_w < PIC_Y_START + PIC_HEIGHT) )
pixel_data_w <= rom_rd_data ; //显示图片
else
pixel_data_w <= BACK_COLOR ;
end
//根据当前扫描点的横纵坐标为ROM地址赋值
always @(posedge pixel_clk or negedge sys_rst_n) begin
if(sys_rst_n == 0 )
rom_addr <= 20'd0;
//当横纵坐标位于图片显示区域时,累加ROM地址
else if((pixel_ypos_w >= PIC_Y_START) && (pixel_ypos_w < PIC_Y_START + PIC_HEIGHT)
&& (pixel_xpos_w >= PIC_X_START) && (pixel_xpos_w < PIC_X_START + PIC_WIDTH))
rom_addr <= rom_addr + 1'b1;
//当横纵坐标位于图片区域最后一个像素点时,ROM地址清零
else if((pixel_ypos_w >= PIC_Y_START + PIC_HEIGHT))
rom_addr <= 20'd0;
end
//ROM:存储图片
blk_mem_gen_0 blk_mem_gen_0 (
.clka (pixel_clk), // input wire clka
.ena (rom_rd_en), // input wire ena
.addra (rom_addr), // input wire [19 : 0] addra
.douta (rom_rd_data) // output wire [23 : 0] douta
);
endmodule
video_driver.v
module video_driver
(
input pixel_clk ,
input rst_n ,
input [ 23 : 0 ] pixel_data ,
output [ 23 : 0 ] video_rgb ,
output video_hs , // 行同步信号
output video_vs , // 场同步信号
output video_de , // 数据使能
output [ 11 : 0 ] pixel_xpos , // 像素点横坐标 1280
output [ 11 : 0 ] pixel_ypos // 像素点横坐标 720
);
//parameter define
//1280*720 分辨率时序参数 时钟频率74.25
parameter H_SYNC = 12'd40; //行同步
parameter H_BACK = 12'd220; //行显示后沿
parameter H_DISP = 12'd1280; //行有效数据
parameter H_FRONT = 12'd110; //行显示前沿
parameter H_TOTAL = 12'd1650; //行扫描周期
parameter V_SYNC = 12'd5; //场同步
parameter V_BACK = 12'd20; //场显示后沿
parameter V_DISP = 12'd720; //场有效数据
parameter V_FRONT = 12'd5; //场显示前沿
parameter V_TOTAL = 12'd750; //场扫描周期
// reg define
reg [11 : 0] cnt_h ;
reg [11 : 0] cnt_v ;
wire data_reg ;
// define
// next is main code
always@(posedge pixel_clk or negedge rst_n)
begin
if( rst_n == 0)
begin
cnt_h <= 0 ;
end
else
begin
if(cnt_h == H_TOTAL - 1)
begin
cnt_h <= 0 ;
end
else
cnt_h <= cnt_h + 1 ;
end
end
always@(posedge pixel_clk or negedge rst_n)
begin
if( rst_n == 0)
begin
cnt_v = 0 ;
end
else
begin
if( cnt_h == H_TOTAL - 1)
begin
if(cnt_v == V_TOTAL - 1)
begin
cnt_v <= 0 ;
end
else
begin
cnt_v <= cnt_v + 1 ;
end
end
end
end
// =======================main code============\\
// video_rgb
// video_hs
// video_vs
// video_de
// pixel_xpos
// pixel_ypos
assign video_hs = 1 ;
assign video_vs = 1 ;
assign video_rgb = video_de ? pixel_data : 24'b0 ;
assign video_de = (((cnt_h >= H_SYNC+H_BACK) && (cnt_h < H_SYNC+H_BACK+H_DISP))
&&((cnt_v >= V_SYNC+V_BACK) && (cnt_v < V_SYNC+V_BACK+V_DISP)))
? 1'b1 : 1'b0;
assign data_reg = (((cnt_h >= H_SYNC+H_BACK - 1) && (cnt_h < H_SYNC+H_BACK+H_DISP - 1))
&&((cnt_v >= V_SYNC+V_BACK) && (cnt_v < V_SYNC+V_BACK+V_DISP)))
? 1'b1 : 1'b0;
assign pixel_xpos = data_reg ? (cnt_h - (H_SYNC + H_BACK - 1'b1)) : 0;
assign pixel_ypos = data_reg ? (cnt_v - (V_SYNC + V_BACK - 1'b1)) : 0;
endmodule







![[Linux] LVS负载均衡群集+NAT部署](https://img-blog.csdnimg.cn/direct/a460580f32f542acac50a370124c46e4.png)