2022年圣诞节到来啦,很高兴这次我们又能一起度过~
CSDN诚邀各位技术er分享关于圣诞节的各种技术创意,展现你与众不同的精彩!参与本次投稿即可获得【话题达人】勋章+【圣诞快乐】定制勋章(1年1次,错过要等下一年喔)!
你可以从以下几个方面着手(不强制),或者根据自己对话题主题的理解创作,参考如下:
提醒:在发布作品前请把不用的内容删掉
本可以蓝桥ROS云课复现,后续补充。
一组cocube绘制圣诞树
之前,有绘制各类优美曲线的博客,但是一个机器人绘制效率肯定是有限的,那么一组机器人效果一定就是倍数关系啦。
优美的曲线(含蝴蝶线)-CoCube
如何将数学曲线变为机器人轨迹-花式show爱心代码-turtlesim篇
一、前言
提示:可简单介绍此次创意背景。
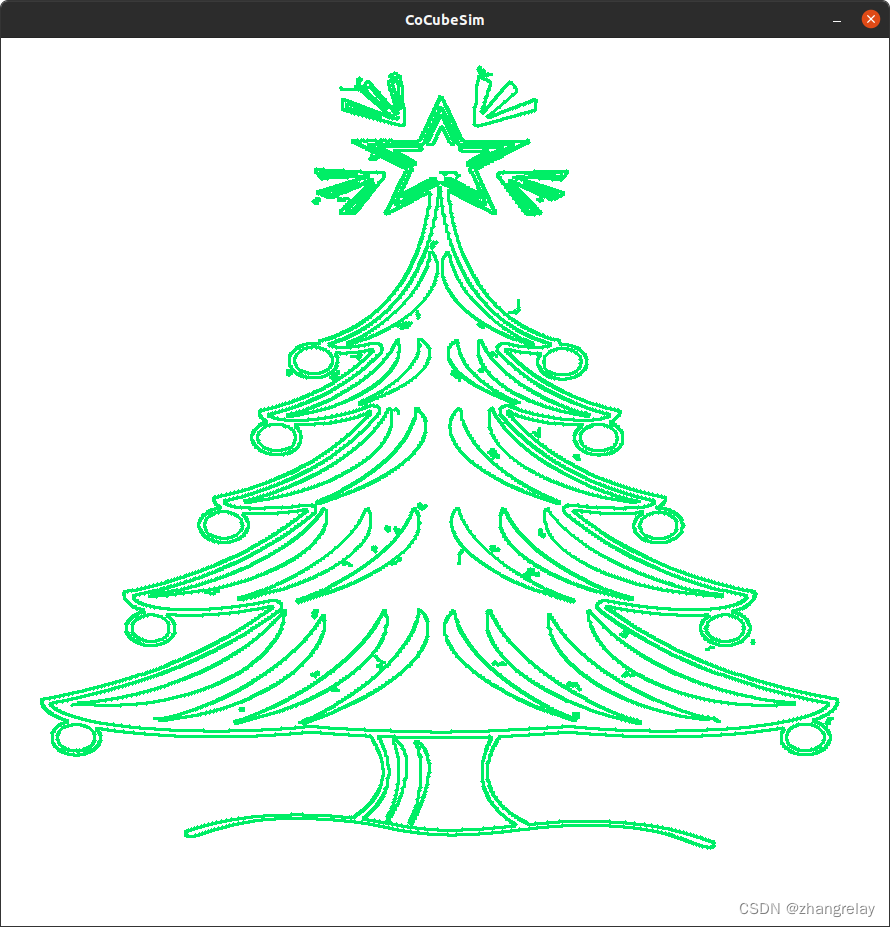
Turtlesim修改为CoCube,使用sketch工具包绘制出圣诞树。
需要用到的功能包:
- turtlesim
- sketch
二、创意名
提示:可介绍本篇文章要实现的圣诞节相关技术创意。
绘制各类圣诞树随心所欲哦。

这个功能包有个啥子小问题呢。
就是绘制过程中,各个小机器人分配任务不均衡。
经常出现一人绘制,万人围观的场面呢。
只剩一个绘制了。

绘制完成后。

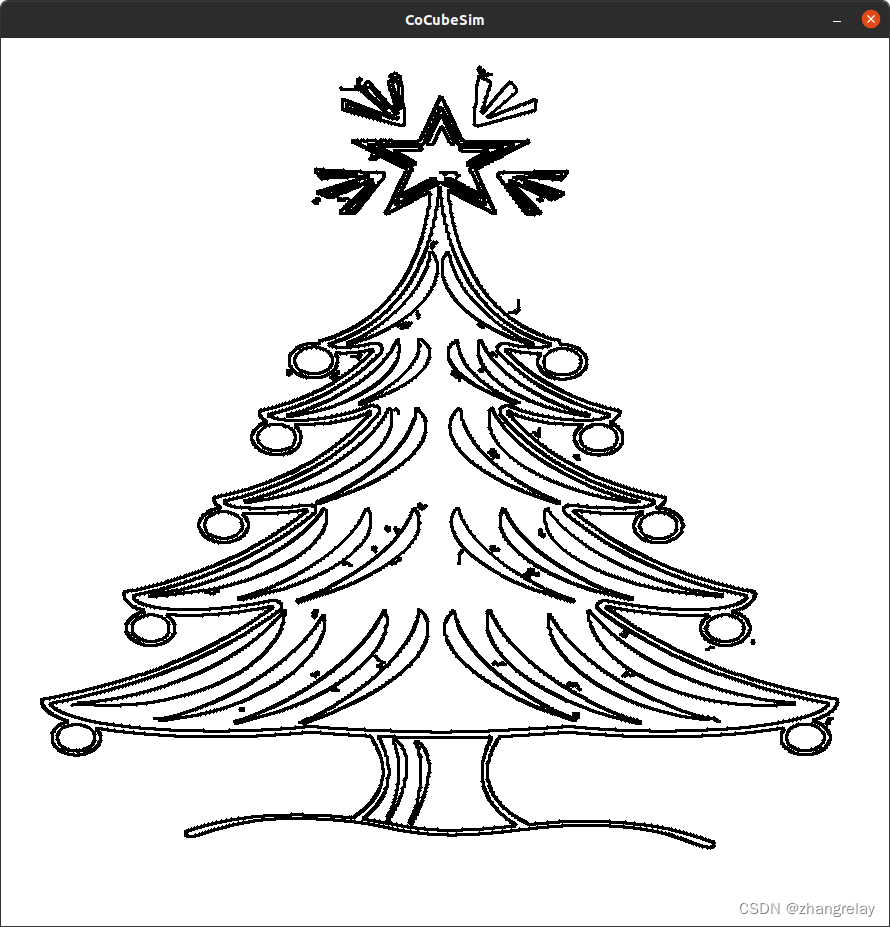
三、效果展示
提示:可展示本篇文章要实现的圣诞节相关技术创意最终效果。
需要绘制的圣诞树越复杂需要的机器人数量越多。
一号圣诞树:
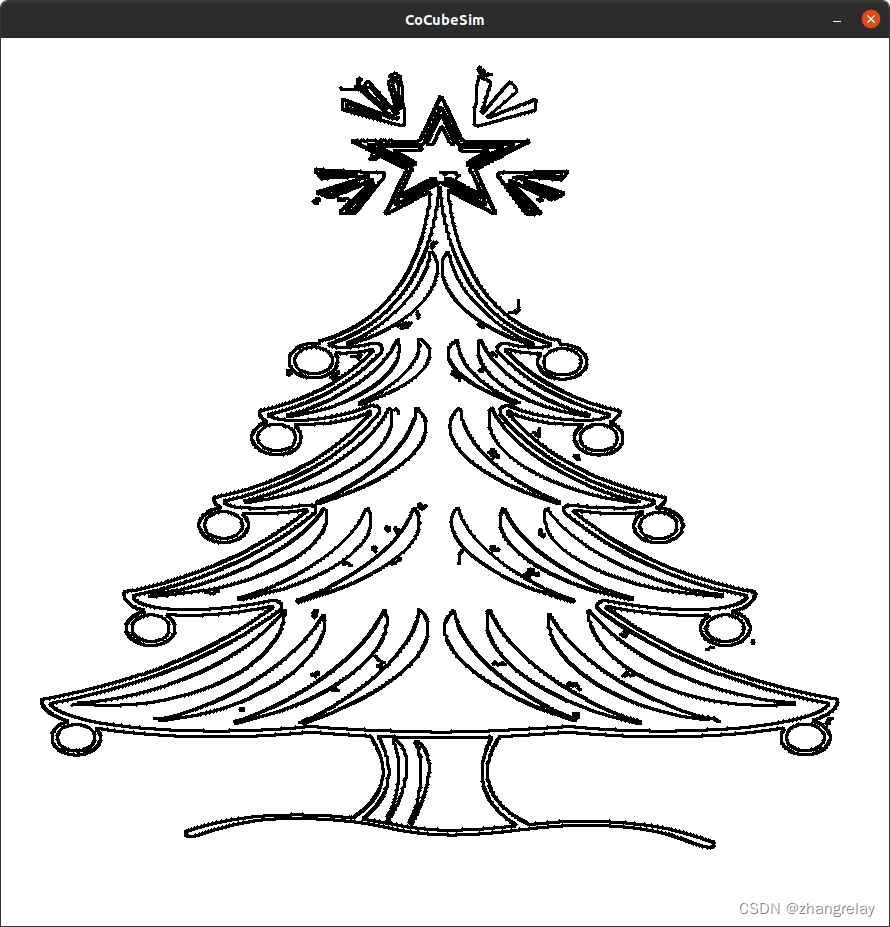
二号圣诞树:

换个颜色:

完成后:
四、实现步骤
提示:可详细介绍实现相关创意的操作步骤。
需要ROS+Turtlesim+Sketch。
配置好Project: Turtle-Sketch。
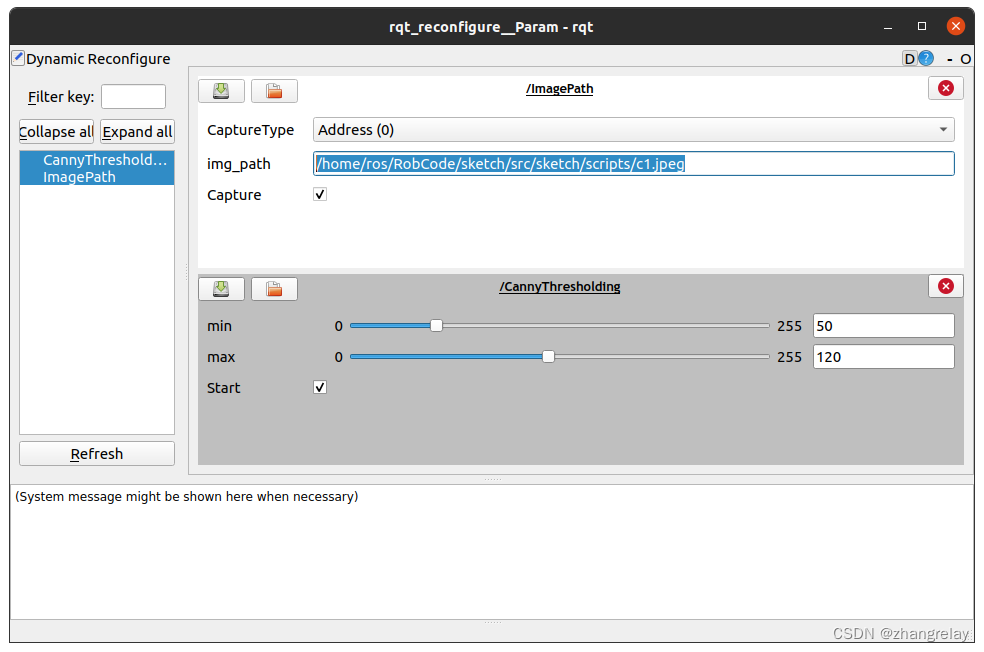
在终端输入:
roslaunch sketch sketcher.launch
ros@ros:~/RobCode/sketch$ roslaunch sketch sketcher.launch
... logging to /home/ros/.ros/log/0c537ad0-890a-11ed-a964-4789d50e4dcc/roslaunch-ros-278770.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://ros:34897/
SUMMARY
========
PARAMETERS
* /rosdistro: noetic
* /rosversion: 1.15.15
NODES
/
CannyThresholding (image_thresholding/server.py)
ImagePath (image_thresholding/import_server.py)
Sketch (sketch/sketcher.py)
rqt_reconfigure (rqt_reconfigure/rqt_reconfigure)
sim (turtlesim/turtlesim_node)
auto-starting new master
process[master]: started with pid [278778]
ROS_MASTER_URI=http://localhost:11311
setting /run_id to 0c537ad0-890a-11ed-a964-4789d50e4dcc
process[rosout-1]: started with pid [278788]
started core service [/rosout]
process[rqt_reconfigure-2]: started with pid [278791]
process[CannyThresholding-3]: started with pid [278792]
process[ImagePath-4]: started with pid [278797]
process[sim-5]: started with pid [278798]
process[Sketch-6]: started with pid [278799]
Max = 120 Min = 50
[INFO] [1672491199.756063]: Address selected
[INFO] [1672491199.760637]: Image Loaded
[INFO] [1672491199.761917]: Select minimum and maximum threshold
Max = 120 Min = 50
[INFO] [1672491203.376289]: Spawning an army of turtles to sketch your image
[INFO] [1672491205.530128]: Sketching ....
[INFO] [1672491292.705367]: Press Ctrl+C to terminate the program
导入具体圣诞树图片:
/home/ros/RobCode/sketch/src/sketch/scripts/c1.jpeg
等待绘制完成即可。
五、编码实现
提示:可详细展示实现相关创意的代码。
绘制核心代码Python版本。
具体可参考:
Program to sketch the contours in a turtle-sim
Author: Shilpaj Bhalerao
Date: Aug 30, 2020
#!/usr/bin/env python3.8
"""
Program to sketch the contours in a turtle-sim
Author: Shilpaj Bhalerao
Date: Aug 30, 2020
"""
import rospy
import numpy as np
import math
import sys
import time
import multiprocessing
import cv2
import matplotlib.pyplot as plt
from geometry_msgs.msg import Twist
from turtlesim.msg import Pose
from turtlesim.srv import *
from std_srvs.srv import Empty
from Turtle import *
# from sketch.msg import points, groups, segments
# from sketch.srv import test
import itertools
INTERNAL = False
class Robot:
def __init__(self, parallel=1):
self.count = 1
self.list = []
self.processes = []
self.PARALLEL = parallel
self.start = False
self.image = None
self.activate = True
self.draw_contour = False
# Variables to access contours data
self.collection_points = []
self.collection_segments = []
self.collection_groups = []
# Initialize sketcher node
rospy.init_node('sketcher', anonymous=False)
# Publisher
self.pub = rospy.Publisher('/turtle1/cmd_vel', Twist, queue_size=10)
# Subscriber
# rospy.Subscriber('contours', segments, self.callback)
# Rate to control frequency of operation of node
self.rate = rospy.Rate(1) # 10hz
# Reset the turtle-sim simulator
reset_sim()
time.sleep(2) # Delay to make sure dynamic reconfigure is ready
while not rospy.is_shutdown():
if INTERNAL: # Test the code without the data exchange from outside node
center = [5.54, 5.54]
origin = [4.0, 4.0]
l_top = [4.0, 9.0]
r_top = [9.0, 9.0]
l_bottom = [4.0, 4.0]
r_bottom = [9.0, 4.0]
self.start = True
self.contours = [[(1, 1), (4, 2), (3, 3,), (4, 9), origin],
[(9, 1), (1, 2), (1, 3,), (9, 9), (9, 4), origin],
[center, l_top, r_top, r_bottom, l_bottom, center]]
self.numbers = len(self.contours)
elif not INTERNAL: # Test the code with other nodes data
# Wait for user to select image from a path or capture an image using camera
if self.activate and not self.draw_contour:
self.load_img()
# After selecting image, start drawing contours and adjust the threshold
if self.activate and rospy.get_param('ImagePath/Capture'):
self.find_contours()
# After finalizing contours, spawn an army of turtles and start sketching
if self.start:
# Spawn turtle at the first point of the contours
self.spawn_source()
if self.PARALLEL == 0: # If sequential implementation mode is selected
self.trace()
elif self.PARALLEL == 1: # If parallel implementation mode is selected
rospy.loginfo("Sketching ....")
# Code for Multi-processing
for i in range(self.numbers):
p = multiprocessing.Process(target=self.trace_parallel, args=[i])
p.start()
self.processes.append(p)
for process in self.processes:
process.join()
# Remove the turtles after sketching is done
self.kill_destination()
rospy.loginfo("Press Ctrl+C to terminate the program")
rospy.spin()
else:
pass
# ------------------------------- Functions related to image processing ----------------------------
def load_img(self):
"""
Load image using either:
- Path of an image
- Using a camera
"""
while self.image is None:
types = rospy.get_param('ImagePath/CaptureType') # Check either camera or path is selected
# If image path is selected
if types == 0:
image_path = rospy.get_param('ImagePath/img_path') # Read the path
self.image = cv2.imread(image_path) # Load an image from the path
# If image is loaded properly, start finding edges
if self.image is not None:
rospy.loginfo("Address selected")
self.draw_contour = True
break
# If camera is selected
elif types == 1:
cap = cv2.VideoCapture(0)
while True:
# Check if frame is selected
condition = rospy.get_param('ImagePath/Capture')
# Capture frame-by-frame
ret, frame = cap.read()
# Display the resulting frame
cv2.imshow('Capture Image to Sketch', frame)
cv2.waitKey(1)
# If frame is selected properly, start finding edges
if condition:
self.image = frame
cv2.destroyWindow('Capture Image to Sketch')
self.draw_contour = True
break
# Resize image since turtle-sim dimensions are 500 x 500
self.image = cv2.resize(self.image, (500, 500))
rospy.loginfo("Image Loaded")
rospy.loginfo("Select minimum and maximum threshold")
def find_contours(self):
"""
Find edges and contours in an image
"""
# Grayscale
gray = cv2.cvtColor(self.image, cv2.COLOR_BGR2GRAY)
# Find Canny edges using threshold inputs
gains = rospy.get_param('/Thresholds')
min_val = gains[0]
max_val = gains[1]
edged = cv2.Canny(gray, min_val, max_val)
cv2.imshow("Select Threshold Values", edged)
cv2.waitKey(1)
# If edges are selected, start drawing sketch
start = rospy.get_param('/Activate')
if start:
# Find contours
contours, hierarchy = cv2.findContours(edged, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)
# Convert contours to accessible data format
self.contour_to_accessible_format(contours)
# Draw all contours on a blank image
blank = np.zeros(shape=[500, 500, 3], dtype=np.uint8)
cv2.drawContours(blank, contours, -1, (255, 255, 255), 1)
def contour_to_accessible_format(self, contours):
"""
Function to convert the opencv contours to accessible data format
- Collection of x,y coordinates is a point
- Collection of points is a segment
- Collection of segments is a group
- Collection of groups is a contour
:param contours: Extracted contours from the image
:type contours: opencv contours
"""
for i in range(len(contours)): # For all the contours
if len(contours[i]) > 10: # If they have more than 10 points
for j in range(len(contours[i])): # Find the x,y coordinates of all the points
x_cord = (contours[i][j][0][0] * 11) / 500 # Convert points within (11, 11) i.e. size of turtle-sim
y_cord = (contours[i][j][0][1] * 11) / 500
# Save these coordinates in a list named collection_points and subtract y from 11 to make upright
# image
self.collection_points.append((x_cord, 11.0 - y_cord))
# Collect all line segments in collection_segments list
self.collection_segments.append(self.collection_points)
self.collection_points = []
# Collect all groups in collection_groups list
self.collection_groups.append(self.collection_segments)
# Collection of all contours in contours
self.contours = self.collection_segments
# Total number of contours
self.numbers = len(self.contours)
# Reset and code flow
self.collection_segments = []
self.activate = False
self.start = True
# ------------------------------- Functions related to sketching turtle path ----------------------------
def trace_parallel(self, j):
"""
Function to trace the contours using multi-processing
:param j: Number of multi-processes
:type j: Int
"""
# Take x,y coord. of next point in contour and teleport turtle to that point(for all contours simultaneously)
for k in range(len(self.contours[j])):
self.list[j].teleport(self.contours[j][k][0], self.contours[j][k][1], 0.0)
def trace(self):
"""
Function to trace the contours using sequential programming
"""
# Take x,y coord. of next point in contour and teleport turtle to that point(for one contour at a time)
for j in range(self.numbers):
for k in range(len(self.contours[j])):
self.list[j].teleport(self.contours[j][k][0], self.contours[j][k][1], 0.0)
# ------------------------------- Functions related to turtle actions ----------------------------
def spawn_source(self):
"""
Spawn multiple turtles on the first point of each contour
"""
rospy.loginfo("Spawning an army of turtles to sketch your image")
for i in range(self.numbers):
self.list.append(Turtle(i + 1))
if i == 0:
self.list[0].set_pen(0)
self.list[0].teleport(self.contours[i][0][0], self.contours[i][0][1], 0.0)
self.list[0].set_pen(1)
else:
self.list[i].spawn(self.contours[i][0][0], self.contours[i][0][1], 0.0)
def kill_destination(self):
"""
Remove the turtles from simulation at the end of sketching
"""
for i in range(self.numbers):
self.list[i].kill_turtle()
def reset_sim():
"""
Function to reset the simulator
"""
try:
reset_serv = rospy.ServiceProxy('/reset', Empty)
reset_serv()
except rospy.ServiceException as e:
rospy.loginfo("Service execution failed: %s" + str(e))
if __name__ == '__main__':
try:
turtle = Robot(int(sys.argv[1]))
except KeyboardInterrupt:
exit()
原作品机器翻译如下:
#项目:海龟素描
##概述
-在这个项目中,左边的图像作为输入,右边的图像作为输出,使用turtlesim
-左侧的图像可以使用其路径选择,也可以直接从相机拍摄
-以下视频显示了该项目的实际情况
---
##使用的概念
以下是本项目使用的概念:
-**动态重新配置**
-使用路径导入图像
-使用相机导入图像
-设置Canny边缘检测的阈值
-**ROS参数**
-设置阈值参数的值
-获取阈值参数的值
-**ROS服务**
-产卵海龟
-传送海龟
-将笔的状态设置为-ON/OFF
-完成草图后移除海龟
-**OpenCV**
-导入图像的步骤
-使用Canny边缘检测查找边缘
-查找轮廓的步骤
-**多处理**
-为了画草图而生下一群海龟
---
##目录结构
-该目录包含3个包:
-“草图`
-`动态重新配置`
-`image_thresholding`
-草图目录结构
```
├── CMakeLists.txt
├── docs # Supported files for documentation
│ ├── Contours.png
│ ├── done.png
│ ├── dynamic reconfigure.png
│ ├── edges.png
│ ├── Output.png
│ ├── rosgraph.png
│ ├── test.png
│ └── turtles.png
├── include
│ └── sketch
├── launch # Launch Files
│ └── sketcher.launch
├── package.xml
├── README.md
├── nodes # ROS Nodes
│ ├── ironman.jpeg
│ ├── sketcher.py
│ └── Turtle.py
└── TODO.md # TO DO for next version
```
-Image_thresholding目录结构
```
.
├── cfg # Configuration file for GUI
│ ├── import.cfg # GUI params related to image import
│ └── thresholds.cfg # GUI params related to image thresholding
├── CMakeLists.txt
├── include
│ └── dynamic_parameters
├── launch # Launch files
│ └── canny_thresholding.launch # Launch - GUI for Canny edge detection
├── nodes # ROS Nodes
│ ├── get_values.py
│ ├── import_server.py # Import Image import parameters in python node
│ └── server.py # Import thresholding parameters in python node
└── package.xml
```
---
##编码风格指南-PEP8
---
##依赖关系
-“动态重新配置”包
-`OpenCV`
---
##安装和运行
要在本地系统上运行项目,请执行以下步骤:
-下载软件包“sketch”、“image_thresholding”和“dynamic-reconfigure noetic-devel”`
-将这些包复制到ROS工作区,即`~/ROS_ws/src/`
-构建工作区
-`$cd~/ROS_ws/`
-`$catkin_make`
-打开新终端并获取ROS工作区的源代码-`source~/ROS_ws/devel/setup.bash`
-运行命令-`$roslaunch sketcher.raunch`
-此命令将打开此项目的turtlesim和GUI


-您可以为`CaptureType选择图像**地址(0)**或**照相机(1)**选项`
-如果选择*Address(0)*,请在“img_path”部分中插入系统上图像的路径
-然后单击`Capture前面的复选框`
-如果您选择*照相机(0)*,照相机窗口将弹出,您可以在获得所需帧后单击“捕获”前面的复选框
-这将打开一个窗口,其中包含选定帧中的边

-现在,使用GUI设置最小和最大阈值以获得所需的轮廓
-单击“开始”前面的复选框,产生一支海龟大军,它将为您绘制这些轮廓

-草图完成后,海龟会消失

**注:**
-如果要将方法从并行更改为顺序,请执行以下步骤:
1.在此目录中打开启动文件`~/ROS_ws/sketch/launch/`
2.sketcher节点的“arg”标记的值为1
3.将此值更改为`0`
-这里,0=顺序执行,1=并行执行
可扩展部分:
#要执行的操作:
参考-turtle_actionlib
##项目1:绘制等高线
##下一版本的任务
-[]为等高线数据传输创建自定义消息
-[]在主题上传输等高线数据
-[]通过服务传输等高线数据
-[]使用ROS参数传输等高线数据
-[]添加加权原始图像,为GitHub配置文件创建一个漂亮的.gif文件
-[]使用GUI窗口上的按钮
-[]创建插件
-[]SRS文件
-[]编码结构图
-[x]导入图像
-[x]查找轮廓
-[x]在代码中添加自定义阈值
-[x]使用套头衫绘制芋头
-[x]将乌龟从一点移动到另一点
-[x]繁殖多只海龟
-[x]将繁殖的海龟传送到轮廓的第一个点
-[x]顺序轮廓绘制
-[x]同时绘制多个轮廓的多重处理
-[x]用于捕获图像或加载图像并显示输出的GUI
-[x]使用ROS1 Noetic
-[]用于生产的ROS2端口
-[]遵循编码样式
-[]创建文档
-[]优化代码
-[]使用PyCUDA在GPU上运行代码
-[x]文档
-依赖关系
-环境文件
-[]包装和出版
-[]日志记录模块
-[x]README文件
-[]包括使用的概念和与概念的良好资源链接
---
##项目2:如果可以,请抓住我
-[]动议
-[]动态配置
-[]PID的自定义消息
-[x]用于精确控制的PID控制器类代码
-[]实现PID调节的动态重新配置
---
##项目3:
-[]TF合作伙伴
-[]在turtlesim中创建另一个坐标系
-[]将海龟移到某个位置,并显示相对于另一个原点的坐标
提醒:在发布作品前请把不用的内容删掉