经典著作,值得一读,英文原版下载链接【免费】ModernRadarforAutomotiveApplications资源-CSDN文库。
2.4 雷达波形和信号处理
对于连续波雷达来说,波形决定了其基本信号处理流程以及一些关键功能。本节将以FMCW波形为例,讨论信号模型和基本信号处理流程。
图2.15绘制了FMCW波形示例。这个波形由一系列的chirp组成。对于每个chirp,其频率与时间的关系定义为
 (2.35)
(2.35)
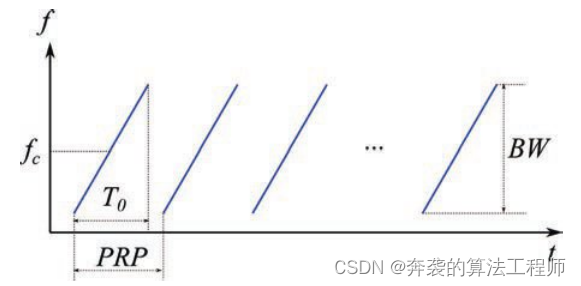
图2.15 典型FMCW波形
这里-T0/2 ≤ t ≤ T0/2。T0是chirp长度,fc是中心频率,BW是带宽。
基于(2.12),发射信号的瞬时相位φ(t)是f(t)的积分:
 (2.36)
(2.36)
并且,-T0/2 ≤ t ≤ T0/2
其中C是不定积分中的常数,可以在接下来的计算中忽略。时域传输信号为
![]() (2.38)
(2.38)
这里,
 (2.39)
(2.39)
是chirp的斜率。
2.4.1 距离处理
假设静态目标在距离R处,目标的反射信号时域表达式为:
![]() (2.40)
(2.40)
这里δt0 = 2R/c是电磁波的往返延迟,ϕ是相位,wR(t)是矩形窗函数:
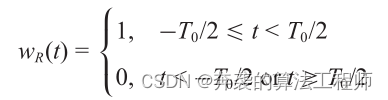 (2.41)
(2.41)
FMCW雷达结构中的去chirp处理是将接收信号与原始发射信号混合处理。基带信号的数学表达式为stx (t)乘以接收信号s*rx (t)的复共轭:
![]() (2.42)
(2.42)
由于![]() 在典型的汽车应用中接近于零,因此可以丢弃它。ϕb是剩余项,在这种情况下不感兴趣,因此也可以丢弃。简化后的基带信号为:
在典型的汽车应用中接近于零,因此可以丢弃它。ϕb是剩余项,在这种情况下不感兴趣,因此也可以丢弃。简化后的基带信号为:
![]() (2.43)
(2.43)
对基带信号进行傅里叶变换后,基带信号的频域表示为
![]() (2.44)
(2.44)
 (2.45)
(2.45)
对于sinc函数,峰值是使得fp – Kδt0 = 0的位置,这里fp是峰值频率。因此,目标距离可由下式获得:
 (2.46)
(2.46)
2.4.2 多普勒处理
在(2.45),有个相位项![]() ,也和目标位置相关。单chirp的相位项是一个常数。然而,对于第1个chirp之后的第2个chirp,如果目标运动则它的相位项
,也和目标位置相关。单chirp的相位项是一个常数。然而,对于第1个chirp之后的第2个chirp,如果目标运动则它的相位项![]() 是不同的,因为δt1≠δt0。因此,最简单获取多普勒信息的方式是比较两个连续chirp的相位差:
是不同的,因为δt1≠δt0。因此,最简单获取多普勒信息的方式是比较两个连续chirp的相位差:
![]() (2.47)
(2.47)
 (2.48)
(2.48)
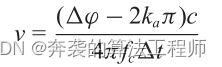 (2.49)
(2.49)
这里R0是目标的初始距离,v是目标相对雷达的速度,Δt是两个连续chirp的时间差,ka是一个整数。2kaπ代表相位混叠。只有当ka=0时,才能获得正确速度。除了混叠,使用(2.49)的另一个主要问题是,如果有多个目标在同一距离,将很难获得每个目标的正确速度。
寻找目标距离和多普勒的一种更流行、更可靠的方法是使用chirp序列,如图2.15所示。首先,对于(2.43),用δt代替δt0:
![]() (2.50)
(2.50)
这里
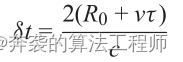 (2.51)
(2.51)
τ是每个chirp的中心时间,并且0≤ τ < M*PRP,这里M是所有chirp数量。方程(2.50)能被写成t和τ的函数,通常被分别称作快时间和慢时间。
 (2.52)
(2.52)
并且
 (2.53)
(2.53)
经过排列,
![]() (2.54)
(2.54)
信号处理部分在数字域操作,t=n/fs,这里n是chrip的第n个采样,fs是采样速率。对于第m个chirp,
 (2.55)
(2.55)
第m个chirp的基带信号为
![]() (2.56)
(2.56)
 常数相位 (2.57)
常数相位 (2.57)
 测距和chirp内多普勒相位 (2.58)
测距和chirp内多普勒相位 (2.58)
 chirp间多普勒相位 (2.59)
chirp间多普勒相位 (2.59)
 距离多普勒耦合 (2.60)
距离多普勒耦合 (2.60)
 高阶项 (2.61)
高阶项 (2.61)
为了便于分析,这里忽略高阶项,因为在普通FMCW雷达系统中,该值非常接近1。有两个与时间相关的参数:n和m。离散傅里叶变换(DFT)可以先应用于n,得到
 (2.62)
(2.62)
 (2.63)
(2.63)
 (2.64)
(2.64)
这里κ是距离单元,fsinc是一个类似于sinc函数的函数,定义为
 (2.65)
(2.65)
这里N是采样长度,fsinc(0)=N是峰值。![]() 也称为第m个chirp的距离分布。与式(2.45)相似,距离曲线的峰值为
也称为第m个chirp的距离分布。与式(2.45)相似,距离曲线的峰值为
 (2.66)
(2.66)
当目标的速度v=0,式(2.66)可以简化为
 (2.67)
(2.67)
这和(2.46)匹配。当v≠0时,为了简化问题,假设目标在chirp序列中的速度为常数。设Rm = R0 + PRPmv为第m个chirp中心的目标距离。目标的距离单元为
 (2.68)
(2.68)
而且
 (2.69)
(2.69)
得到目标的射程Rm和距离单元![]() 后,下一步是尝试推导目标的多普勒特性。为了找到目标的速度,需要识别多普勒单元的位置。已知
后,下一步是尝试推导目标的多普勒特性。为了找到目标的速度,需要识别多普勒单元的位置。已知![]() ,让
,让
 (2.70)
(2.70)
式中,β(m)为振幅变化,峰值为
 (2.71)
(2.71)
基于目标速度为常数的假设,β(m)和参考的(M-1)/2对称
![]() (2.72)
(2.72)
因此,β(m)的DFT结果的幅度也是对称的:
![]() (2.73)
(2.73)
把![]() 和(2.72)放到(2.62),方程可以简化为:
和(2.72)放到(2.62),方程可以简化为:
 (2.74)
(2.74)
对m应用DFT,基带信号可进一步导出为:
 (2.75)
(2.75)
 (2.76)
(2.76)
![]() (2.77)
(2.77)
这里*是卷积,ξ是多普勒单元。如上所述,B(ξ)的幅度是对称的,和一个窗函数类似。fsinc和B(ξ)的卷积不会改变fsinc的峰值位置。因此,目标的多普勒单元为:
 (2.78)
(2.78)
目标的速度为:
 (2.79)
(2.79)
因此,可以从式(2.69)和式(2.79)中提取目标的距离和多普勒。
在距离多普勒处理的实际算法实现中,可以直接对![]() 进行二维快速傅里叶变换,得到
进行二维快速傅里叶变换,得到![]() ,效率高,目标的距离和多普勒信息可以在毫秒内测量。这对于通常需要高更新速率和低延迟的汽车应用程序至关重要。
,效率高,目标的距离和多普勒信息可以在毫秒内测量。这对于通常需要高更新速率和低延迟的汽车应用程序至关重要。
2.4.3 FMCW汽车雷达应用的典型波形参数
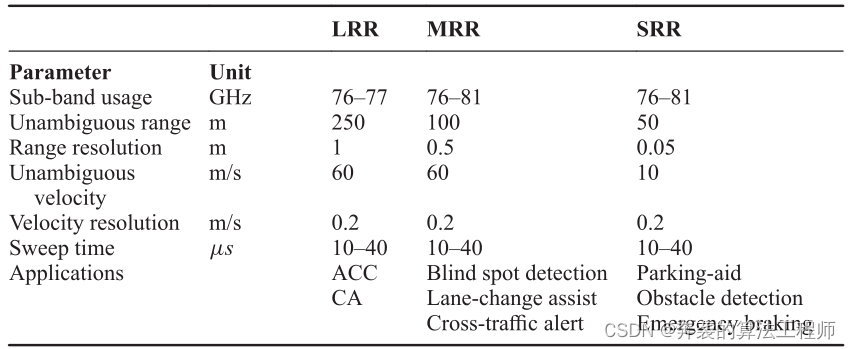
在76-81 GHz范围内工作的汽车雷达系统可以根据雷达应用分为三大组。每组有不同的技术波形参数来满足要求。
第一组使用76-77 GHz频段,被称为LRR系统。LRR包括自适应巡航控制(ACC)和(高速)防碰撞(CA)等应用。这些应用帮助司机驾驶,旨在避免高速事故和碰撞。在LRR应用中,雷达探测距离可达250米。通常需要1GHz连续带宽保证足够的距离分辨率。
另外两组使用76-81 GHz频段,覆盖短程和中程雷达(SRR和MRR)应用。一般来说,这些应用需要更高的距离分辨率,并使用高达4 GHz的带宽。近距离雷达应用,如舱内占用探测和靠近车辆的障碍物探测,不需要很长的探测距离。一些SRR应用,如行人检测、停车辅助和低速(<30公里/小时)紧急制动,可能需要更高的视场(FOV)。对于MRR应用,如后方交通横穿警报、盲点检测和变道检测,检测范围可达100米,视野更窄。
扫描时间显示了基于应用的差异,通常选在10到40us。尽管汽车雷达波形参数根据雷达硬件的不同而有所不同,但表2.5总结了经典FMCW的雷达波形参数,用于选定的应用。感兴趣的读者可参考[26],了解76-77和77-81 GHz频段雷达系统的详细技术参数。
表2.5 汽车雷达波形参数实例
2.4.4 窗锥函数
在距离和多普勒处理*过程中,限时基带信号经过傅里叶变换后得到sinc函数形式的信号,如(2.45)。当sinc函数在目标位置产生峰值时,它创建了一个由“主瓣”和“副瓣”组成的信号。主瓣包含高功率并在预定目标位置(如距离和多普勒)产生峰值。在半功率波束宽度处的主瓣宽度(比峰值功率低3db)决定了距离分辨率。由sinc函数产生的其他瓣称为“副瓣”,通常表示与检测目标相关的无用信号回波。由于sinc函数的第一副瓣比主瓣峰值低约13.26 dB,这些不想要的副瓣可能会阻碍弱目标。
为了减轻副瓣,提出了可供选择的窗锥函数[27]。它们中的许多在当前系统中用于调整主瓣和副瓣之间的交换。有一些选择窗函数的指标,也可以在选择线性FMCW以外的替代波形时使用。
主瓣宽度:包含目标响应的较高(峰值)功率的瓣。主瓣的理论宽度与波形的带宽有关。使用不同的窗函数可以拓宽主瓣。
信噪比损失:使用不同的窗锥会导致目标响应的峰值功率损失,因此信噪比降低。sinc函数的信噪比损失为零,并假定为基准。
峰值旁瓣比(PSLR):峰值功率与最大旁瓣功率之比。更大的PSLR优选用于探测较弱的目标。对于sinc函数,PSLR为-13.26 dB。零点出现在k (1/T0),这里 k =±1,±2 ,…,N / 2。
综合旁瓣电平:旁瓣能量与主瓣能量之比。sinc函数的综合旁瓣电平比为-10.12 dB(从第一个空到旁瓣的末端,不包括主瓣)。
为了解决高旁瓣问题,使用窗函数增加PSLR,使主瓣宽度更宽。对于感兴趣的读者,可以在[27]中找到用于旁瓣控制的最常用窗锥函数的目录。当预定义的窗函数不能满足用户的要求时,可以使用现代优化技术对给定模板的窗函数以及期望的属性进行优化[28]。