最近搜素了论文和相关网页,博主总结了一下无人机测深总共有三种办法:
(1)激光雷达;
(2)测深仪;
(3)探地雷达(GPR)。
1、激光雷达
在含盐、气泡和浮游生物的海水中,光波和电磁波的衰减都非常大,因此,机载激光测深应用程度一直不高。20世纪70年代,人们发现波长470~580nm之间的蓝绿光衰减系数最小,机载激光测深技术得到了迅速的发展。机载激光测深系统(LiDAR)的最初目的主要是获取困难地区的数字高程模型数据。近几年,机载激光雷达技术为浅海、岛礁、暗礁等传统手段难以开展的水深测量提供了新的解决方案。
机载激光测深的特点是:精度高、分辨率高、灵活机动、测点密度高、测量周期短和覆盖面广;同时测量水上、水下三维地形,不需要进行数据融合,真正实现了水陆一体化无缝测量。与多波束测深系统不同的是,机载激光测深系统由于在海底的覆盖宽度仅仅与飞机的航高有关,而与要测量的水深无关,因此特别适合于沿岸浅水区的全覆盖水深测量。
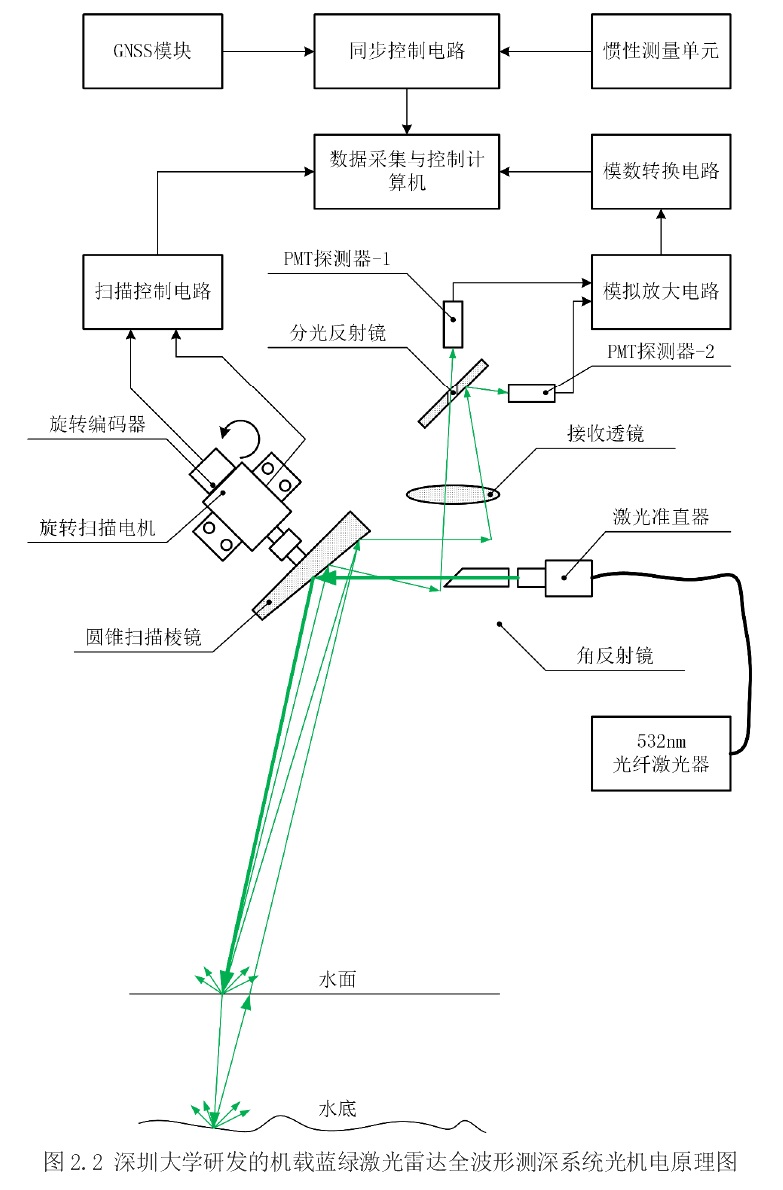
双色激光机载LiDAR测深系统利用装在飞机下部的激光发射器斜向海面发射两种不同波长的激光束。波长1064nm的红外光因无法穿透海面而被海面反射,波长532nm的蓝绿光则以一定折射角度穿透海面到达海底,并被海底反射,两种波长的激光束均被光学接收系统接收。根据两种波长激光束返回的时间差和蓝绿光的入射角度、海水折射率等因素综合计算,可得出测量点的瞬时水深值,再与定位信息、姿态信息、潮汐数据结合,即可得到测量点在地理坐标系下的位置和基于深度基准面的水深值。
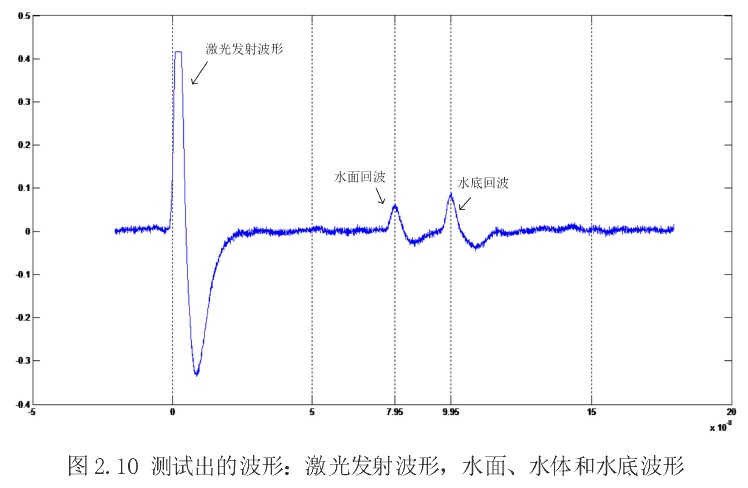
单色激光机载LiDAR测深系统仅采用波长532nm的蓝绿光作为激光器发射光源,一部分从海面返回,一部分穿透海面从海底返回,根据二者到达接收器的时间差,即可计算出海水的深度。采用单色激光作为发射源,既简化系统结果,又不需双色激光同步而提高测深精度,是机载LiDAR测深系统的发展趋势。
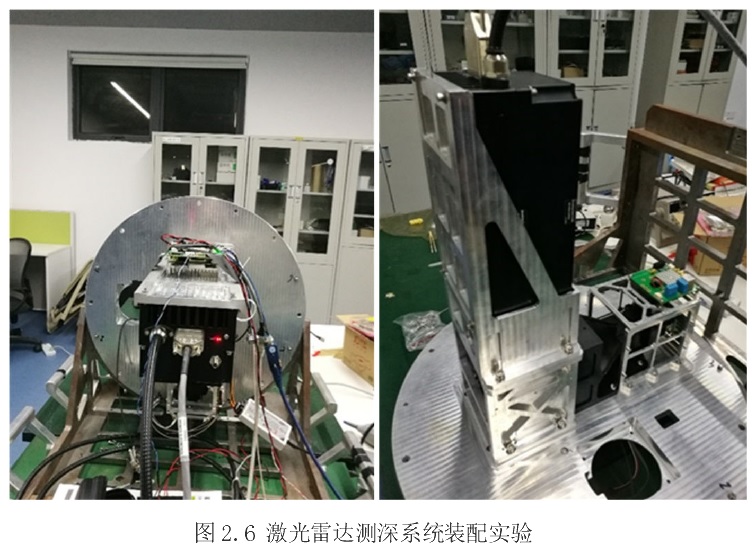
上图这种机载激光雷达设备都比较大,一般装在大型固定翼飞机上。

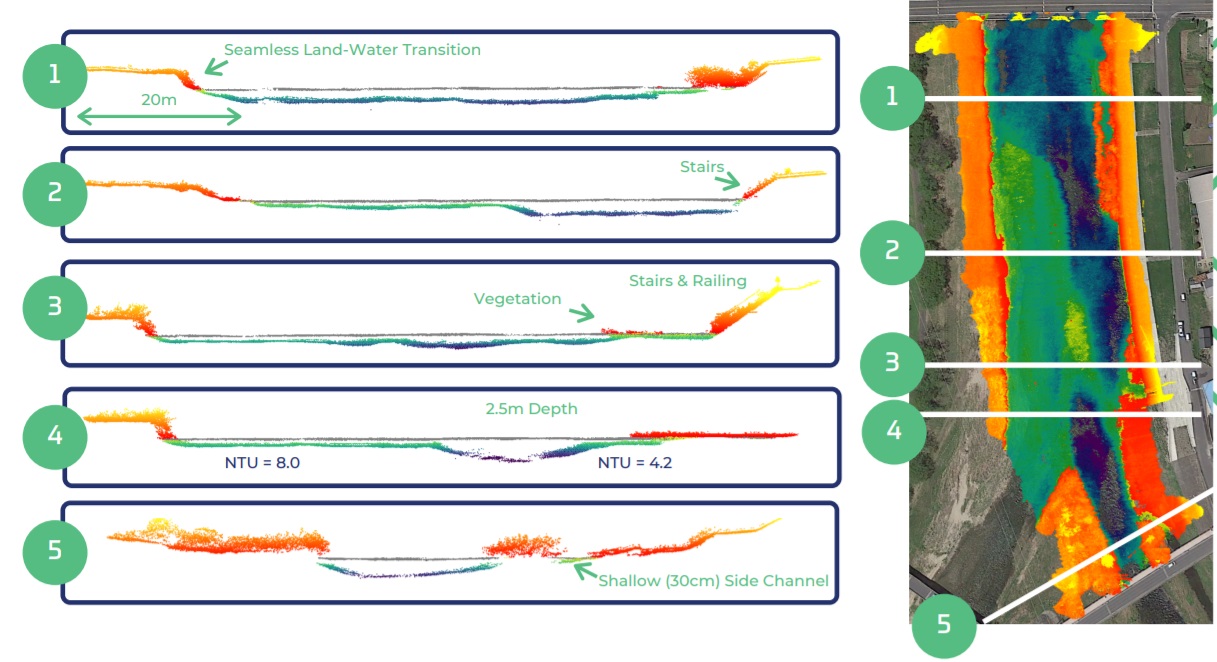
ASTRALiTe EDGE是世界上第一台小型地形和测深扫描激光雷达LiDAR,可通过小型无人机检测小型水下物体、测量浅水深度和测量关键的水下基础设施。LiteWave的2合1专利既可测地形也可测cm级分辨率水深。

它的主要参数为:
(1)波长:532nm;
(2)测深深度:>1.5塞克盘;
(3)水深分辨率:1cm;
(4)重量:5Kg;
(5)定位精度:2cm;
(6)罗经精度:0.2°;
(7)纵横摇精度:0.05°;
(8)水深测量高度:20m,地形测量高度:40m;
(9)扫描角度:±15°;
(10)波束脚印:11mrad(0.001rad),30m高度时33cm。
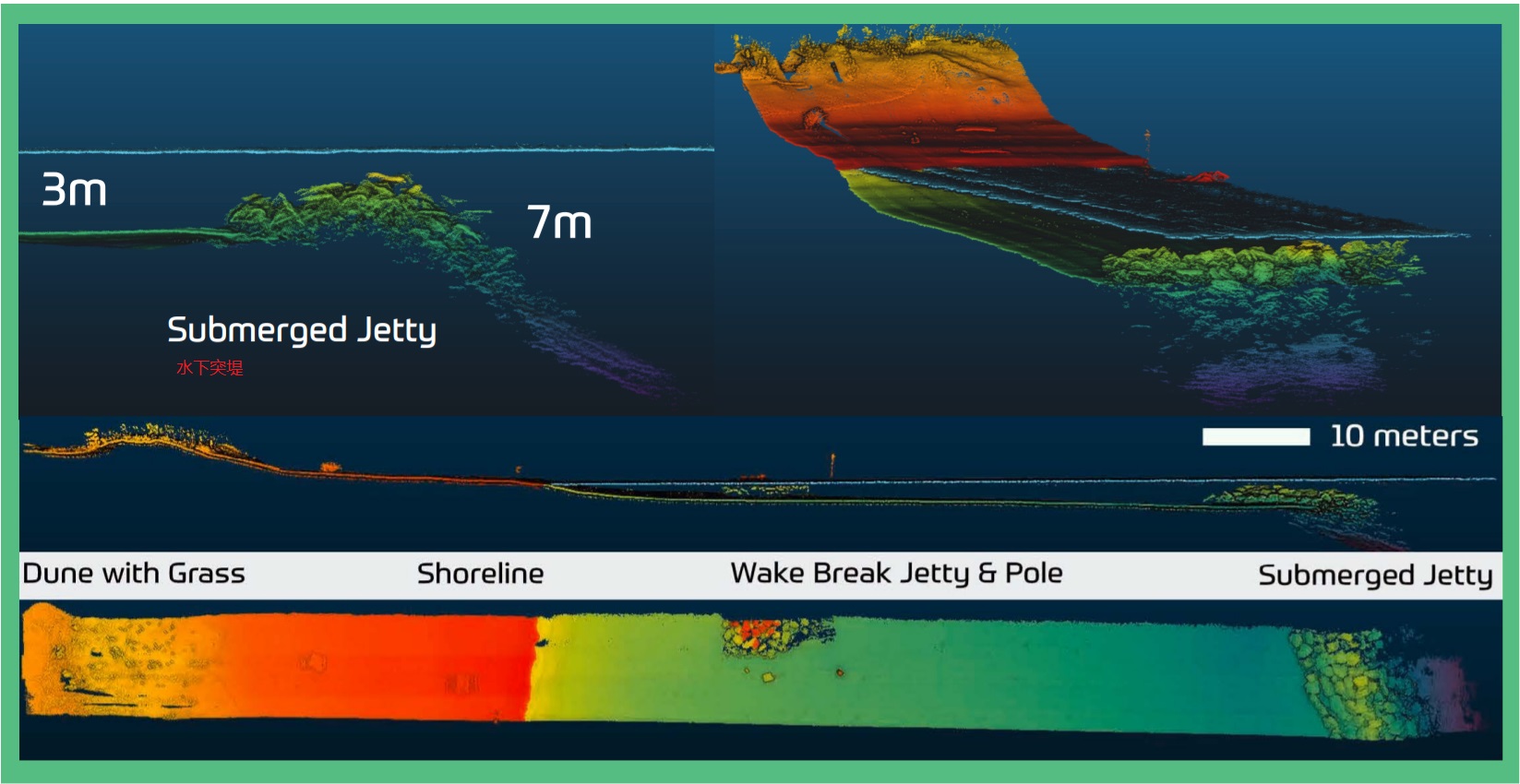
ASTRALiTe EDGE的两个案例图如下,第一个是河道,第二个是突堤。
无人机+激光雷达+无人船可以实现岸滩水深全无人化测量,具体的做法见文章:根据水声和摄影测量数据建立数字测深模型,这篇文章是博主根据外文翻译过来的。
2、测深仪
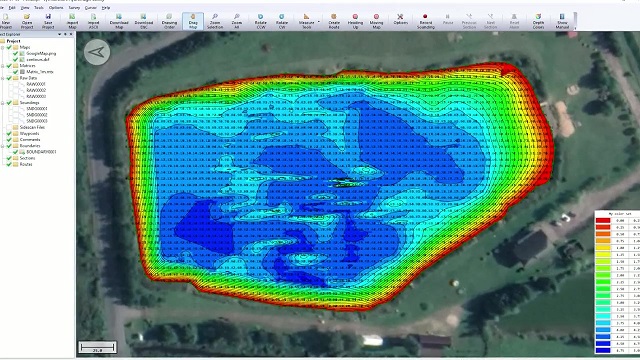
利用无人机搭载高精度测深仪,可以方便快捷地获取水深数据;相比传统方法,机载测量更为灵活高效,且成本更低;尤其是对于传统方法受限的难以到达的水域,机载测量的优势更为显著;它是一种测量水深的高性价比解决方案,可快速获取河流和湖泊的水深及剖面图,进行科学研究和环境监测。它的测深技术参数与测深仪仪器有关。测量时,利用高度计实时测量飞机的高度。


3、探地雷达(GPR)
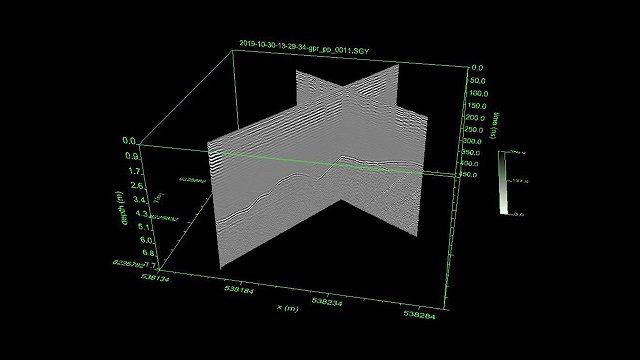
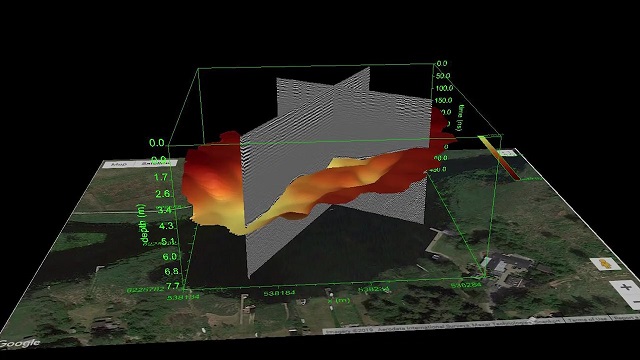
探地雷达(Ground-penetratingradar,GPR)测量是一项艰苦的工作,恶劣的地形环境和天气条件使得测量作业具有一定的难度。而利用无人机与GPR结合,集成为一套机载探地雷达,就能够轻松的对地面、冰层、积雪、岩石、水域、路政、工程建筑等多种区域进行快速测量,使得作业更高效、节约了人力物力、避免了风险、而且可确保提供准确可靠的数据。
SE-70/150机载探地雷达使用插入式主机,搭载SE-70或SE-150型天线,中心频率分别为70MHz和150Mhz,适用于深层地质研究和地下目标探测。5Kg的重量适用于A660等多种无人机平台,可广泛应用于地质、采矿、水体、冰雪、农林、考古、法医、环境、基建、自然灾害、军事安全等多种领域。
它的技术参数见下表:
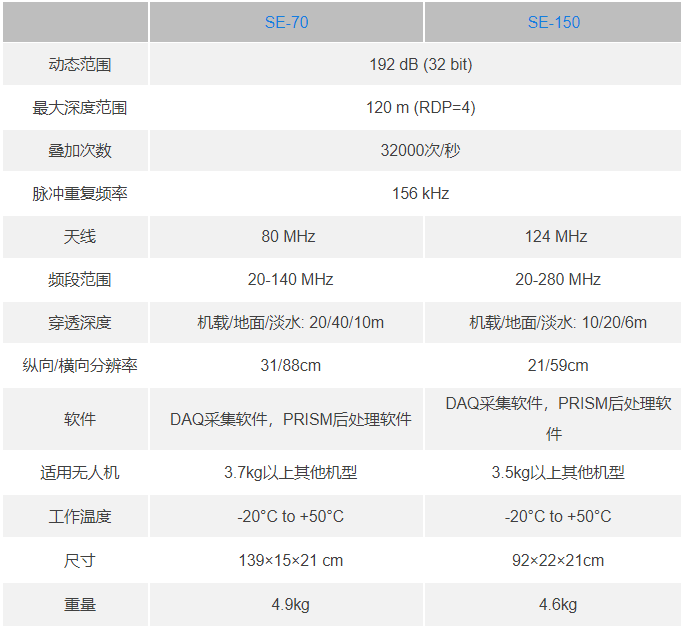
它非常适合难以到达的位置(陡峭的海岸,采矿坑,浅水区,地形障碍)以及池塘,湖泊和运河的水域,无需为部署/回收而大量进入水域。该系统可以在不与水接触的情况下运行,可以测量具有强流的湖泊和河流以及受污染的水域。该系统当前的技术功能允许进行长达15米的深水勘探,即使在水被冰覆盖的情况下,这也是可以的。


https://www.instrument.com.cn/news/20200803/555597.shtml
https://www.sohu.com/a/401155419_100035471
http://old.users.sgg.whu.edu.cn/keyan/xingyedongtai/2019/1126/4367.html
单波段机载测深激光雷达全波形数据处理算法及应用研究_丁凯
https://www.21ic.com/article/735373.html
https://www.docin.com/p-2471347625.html
https://integrated.ugcs.com/product/gpr