usingSystem.Collections;usingSystem.Collections.Generic;usingUnityEngine;publicclassPoleMove:MonoBehaviour{//移动上限制publicfloat up;//移动下限publicfloat below;//速度privatefloat speed;// Start is called before the first frame updatevoidStart(){
speed = Random.Range(0.5f,2.5f);}// Update is called once per framevoidUpdate(){if(transform.position.y>up){
speed =-speed;}if(transform.position.y < below){
speed =-speed;}//让柱子上限移动
transform.position =newVector3(transform.position.x, transform.position.y + speed * Time.deltaTime, transform.position.z);}}
点击CV计算机视觉,关注更多CV干货
论文已打包,点击进入—>下载界面
点击加入—>CV计算机视觉交流群
1.【目标检测】TIDE: Test Time Few Shot Object Detection 论文地址:https://arxiv.org//pdf/2311.18358 开源代码:G…
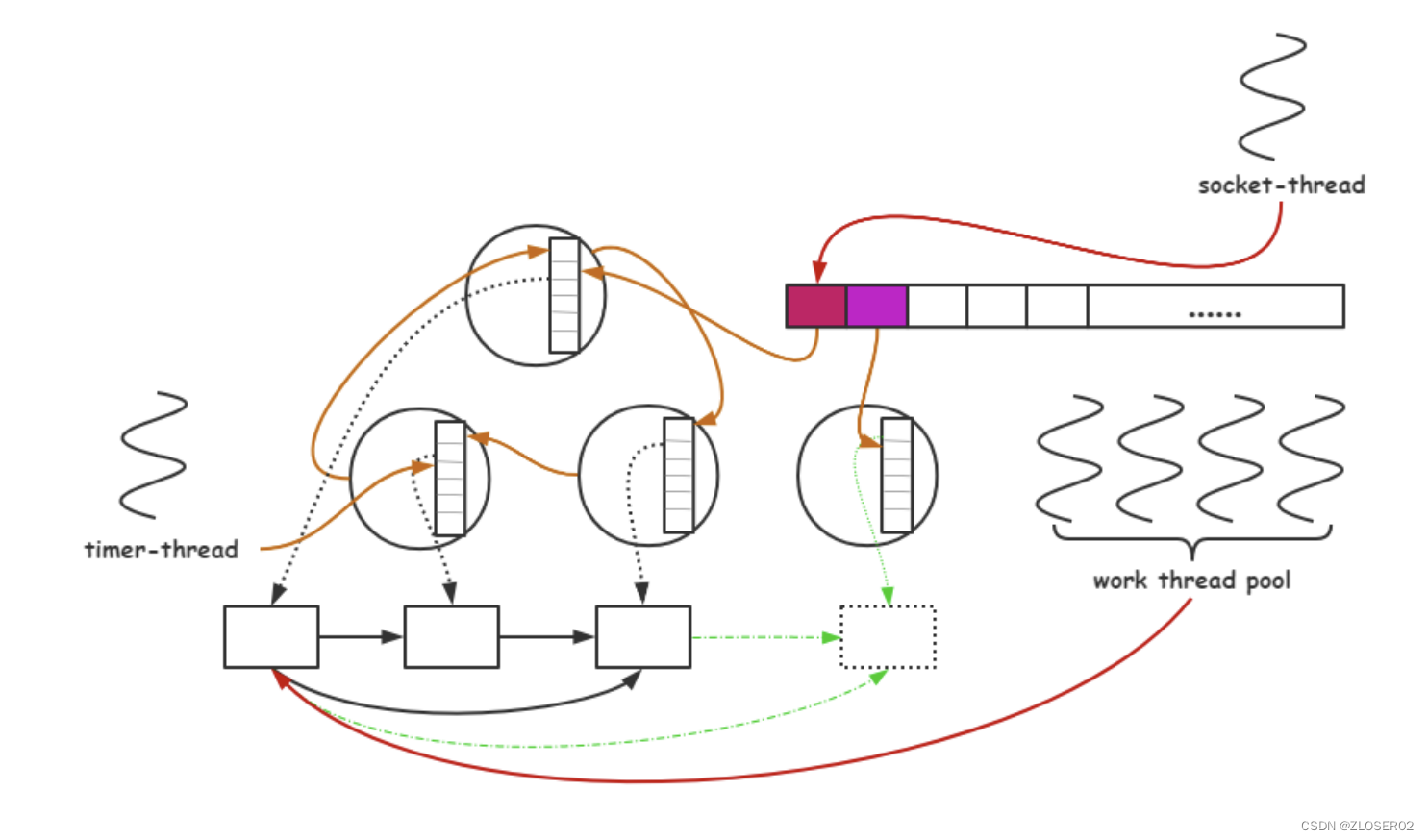
深入理解BIO与NIO
BIO
BIO 为 Blocked-IO(阻塞 IO),在 JDK1.4 之前建立网络连接时,只能使用 BIO
使用 BIO 时,服务端会对客户端的每个请求都建立一个线程进行处理,客户端向服务端发送请求后,…
一、题目大意
我们有N只猫,每次循环进行K次操作(N<100,K<100),每次操作可有以下三种选择:
1、g i 给第i只猫1个食物
2、e i 让第i只猫吃完它所有的食物
3、s i j 交换第i和j只猫的食物。
求出M次…