在项目应用时常常会涉及一些调参工作,如果项目封装成了.exe或者.dll,那么频繁调参多次编译是一件十分低效的事情,如果代码算法或者逻辑是一定的,那么参数完全可以通过读入配置文件来获取 之前在用C++ - opencv的yaml文件配置参数,但是后边参数导入时会出现异常情况,因此更换成 .txt \ .ini \ .config \ .info等格式,这些均为文本文件读取。 # include "opencv2/core.hpp" # include <time.h> using namespace cv;
int main ( int , char * * argv)
{
FileStorage fs ( "test.yml" , FileStorage:: WRITE) ;
fs << "frameCount" << 5 ;
time_t rawtime; time ( & rawtime) ;
fs << "calibrationDate" << asctime ( localtime ( & rawtime) ) ;
Mat cameraMatrix = ( Mat_ < double > ( 3 , 3 ) << 1000 , 0 , 320 , 0 , 1000 , 240 , 0 , 0 , 1 ) ;
Mat distCoeffs = ( Mat_ < double > ( 5 , 1 ) << 0.1 , 0.01 , - 0.001 , 0 , 0 ) ;
fs << "cameraMatrix" << cameraMatrix << "distCoeffs" << distCoeffs;
fs << "features" << "[" ;
for ( int i = 0 ; i < 3 ; i++ )
{
int x = rand ( ) % 640 ;
int y = rand ( ) % 480 ;
uchar lbp = rand ( ) % 256 ;
fs << "{:" << "x" << x << "y" << y << "lbp" << "[:" ;
for ( int j = 0 ; j < 8 ; j++ )
fs << ( ( lbp >> j) & 1 ) ;
fs << "]" << "}" ;
}
fs << "]" ;
fs. release ( ) ;
return 0 ;
}
% YAML: 1.0
frameCount: 5
calibrationDate: "Fri Jun 17 14:09:29 2011\n"
cameraMatrix: ! ! opencv- matrix
rows: 3
cols: 3
dt: d
data: [ 1000. , 0. , 320. , 0. , 1000. , 240. , 0. , 0. , 1. ]
distCoeffs: ! ! opencv- matrix
rows: 5
cols: 1
dt: d
data: [ 1.0000000000000001e-01 , 1.0000000000000000e-02 ,
- 1.0000000000000000e-03 , 0. , 0. ]
features:
- { x: 167 , y: 49 , lbp: [ 1 , 0 , 0 , 1 , 1 , 0 , 1 , 1 ] }
- { x: 298 , y: 130 , lbp: [ 0 , 0 , 0 , 1 , 0 , 0 , 1 , 1 ] }
- { x: 344 , y: 158 , lbp: [ 1 , 1 , 0 , 0 , 0 , 0 , 1 , 0 ] }
# include "opencv2/core.hpp" # include <time.h> using namespace cv;
int main ( int , char * * argv)
{
FileStorage fs2 ( "test.yml" , FileStorage:: READ) ;
int frameCount = ( int ) fs2[ "frameCount" ] ;
String date;
fs2[ "calibrationDate" ] >> date;
Mat cameraMatrix2, distCoeffs2;
fs2[ "cameraMatrix" ] >> cameraMatrix2;
fs2[ "distCoeffs" ] >> distCoeffs2;
cout << "frameCount: " << frameCount << endl
<< "calibration date: " << date << endl
<< "camera matrix: " << cameraMatrix2 << endl
<< "distortion coeffs: " << distCoeffs2 << endl;
FileNode features = fs2[ "features" ] ;
FileNodeIterator it = features. begin ( ) , it_end = features. end ( ) ;
int idx = 0 ;
std:: vector< uchar> lbpval;
for ( ; it != it_end; ++ it, idx++ )
{
cout << "feature #" << idx << ": " ;
cout << "x=" << ( int ) ( * it) [ "x" ] << ", y=" << ( int ) ( * it) [ "y" ] << ", lbp: (" ;
( * it) [ "lbp" ] >> lbpval;
for ( int i = 0 ; i < ( int ) lbpval. size ( ) ; i++ )
cout << " " << ( int ) lbpval[ i] ;
cout << ")" << endl;
}
fs2. release ( ) ;
return 0 ;
}
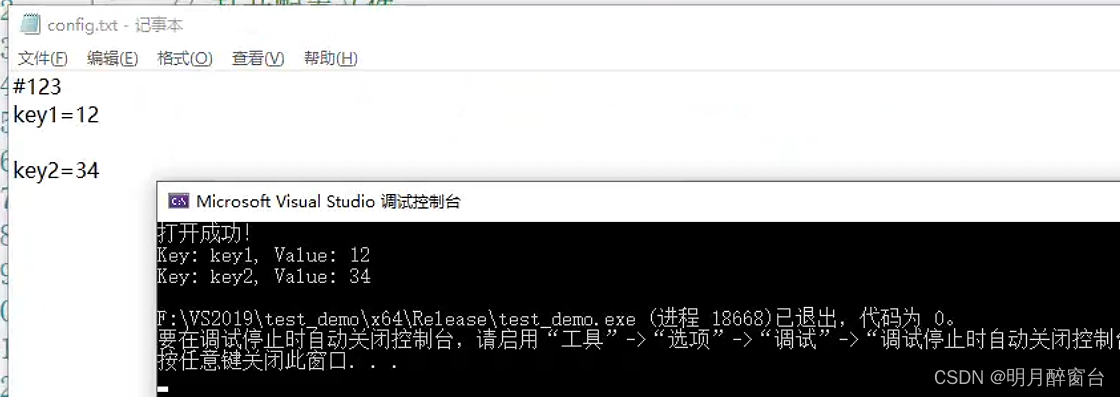
参考:https://linuxcpp.0voice.com/?id=75300 代码实现: # include <iostream> # include <fstream> # include <string> using namespace std;
int main ( )
{
ifstream config_file ( "config.txt" ) ;
if ( ! config_file. is_open ( ) )
{
cerr << "Failed to open config file." << endl;
return - 1 ;
}
string line;
while ( getline ( config_file, line) )
{
if ( line. empty ( ) || line[ 0 ] == '#' )
continue ;
size_t pos = line. find ( '=' ) ;
if ( pos != string:: npos)
{
string key = line. substr ( 0 , pos) ;
string value = line. substr ( pos + 1 ) ;
cout << "Key: " << key << ", Value: " << value << endl;
}
}
config_file. close ( ) ;
return 0 ;
}