运动规划
1.1已有抓取点
假设抓取点已检测到。这些方法设计了从机器人手到目标物体抓取点的路径。这里运动表示是关键问题。虽然存在从机器人手到目标抓握点的无限数量的轨迹,但是由于机器人臂的限制,许多区域无法到达。因此,需要对轨迹进行规划。
主要有三种方法,如传统的基于DMP的方法、模仿学习的方法和基于强化学习的方法。
- 基于DMP的方法:主要包括DMP算法。形式化为稳定的非线性吸引子系统。
- 基于模仿学习的方法:Generalization of human grasping for multi-fingered robot hands.
- Generalization of human grasping for multi-fingered robot hands.
- 基于强化学习的方式:Task-agnostic self-modeling machines.
- Task-agnostic self-modeling machines.
一般而言,检测到抓取点后,运动规划常用ROS MoveIt组件实现
1.2 无抓取点
主要通过强化学习直接完成对原始RGB-D图像的抓取任务。主要有:
- Learning hand-eye coordination for robotic grasping with deep learning and large-scale data collection.
- Qt-opt: Scalable deep reinforcement learning for vision-based robotic manipulation.
- Robustness via retrying: Closed-loop robotic manipulation with selfsupervised learning.
抓取末端执行器
-
二指夹爪是研究和应用中非常常见的抓取末端执行器,例如5.4中的抓取姿态检测库就适用于二指夹爪
-
吸盘也是比较常见的末端执行器
-
灵巧手的设计也是机器人抓取的一个重要研究方向,例如软性灵巧手:既不会损坏物体,还具有一定刚度能实现物体抓取
抓取开源项目
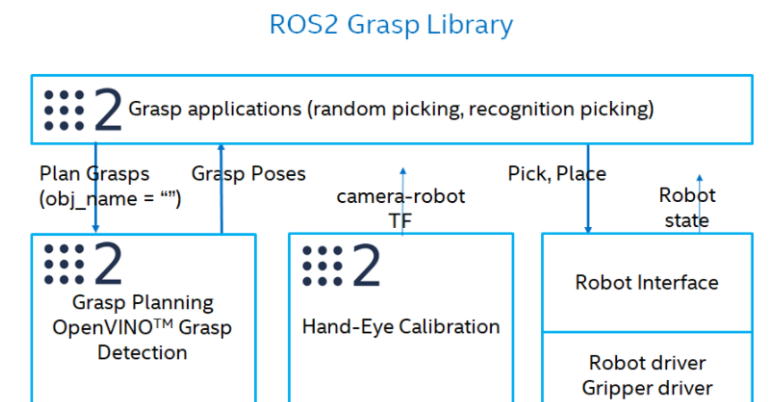
1.ros2grasp(包含手眼标定)
https://intel.github.io/ros2_grasp_library/docs/doc/overview.html
https://github.com/intel/ros2_grasp_library
2.graspit
http://graspit-simulator.github.io/