文章:DLL: Direct LIDAR Localization. A map-based localization approach for aerial robots
代码:https://github.com/robotics-upo/dll
GitHub - robotics-upo/dll: DLL: Direct Lidar Localization
下载安装DLL
在GitHub网站下载再手动解压、复制文件到ros工作空间,或者使用git直接在ros工作空间目录下下载,安装过程参考readme:
## Compilation
Download this source code into the src folder of your catkin worksapce:
```
$ cd catkin_ws/src
$ git clone https://github.com/robotics-upo/dll
```
Compile the project:
```
$ cd catkin_ws
$ source devel/setup.bash
$ catkin_make
```
具体地,
先下载文件,
cd catkin_ws/src
git clone https://github.com/robotics-upo/dll再在工作空间文件夹catkin_ws下
source devel/setup.bash
catkin_make我因为v1.1编译报错,手动下载了v1.0版本。
运行数据集
以运行catec1.launch文件为例
下载bag文件
在网站
Index of /datasets/dll
下载所需的bag文件catec1.bag
修改.launch文件
用vim或者gedit打开catec1.launch,修改
# Bag file
<node name="bag_player" type="play" pkg="rosbag" args="catec1.bag -s 0 -r 1.0 --clock " />
中的.bag为实际绝对路径 。
运行.launch文件
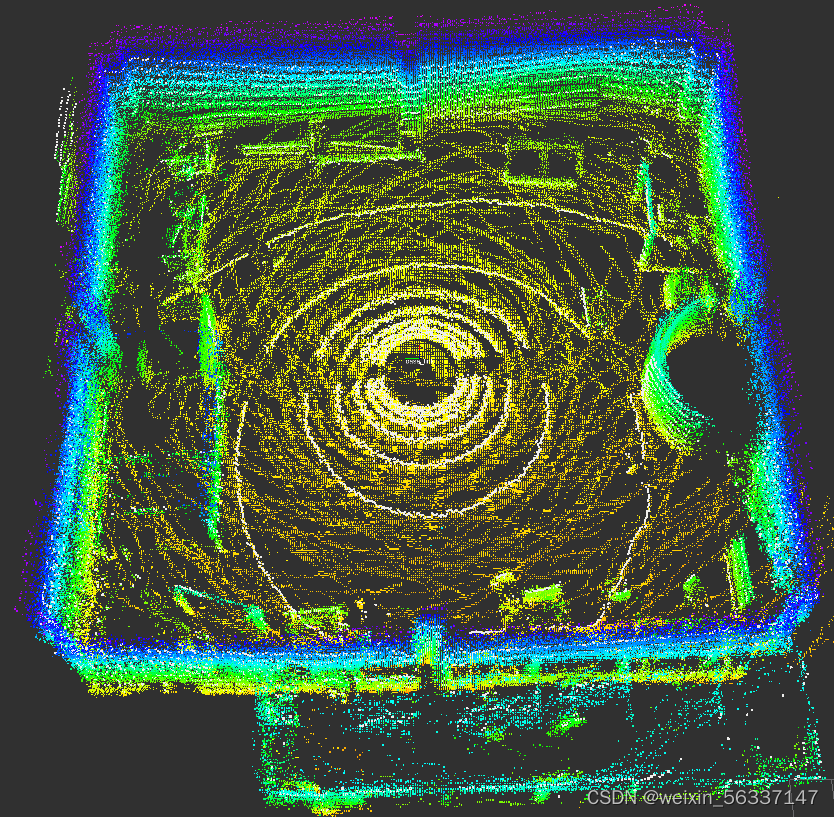
roslaunch dll catec1.launch 效果
话题-节点图

rviz
误差计算
真值在bag文件里面,实际运行结果源程序没有导出,暂时无法计算误差。