今天来水两个激光SLAM的相关框架的学习笔记。
一、LOAM
首先介绍scan-to-scan map-to-map scan-to-map之间的关系:
1.scan-to-scan匹配
即两帧激光雷达数据之间的匹配,目的是求得从起始帧A到目标帧B的相对平移量与旋转矩阵。目前来说scan-toscan中,匹配效果最好的方法是ICP(Iterative Closest point迭代最邻近点算法)优点是计算量小速度快,缺点是误差累计大,长距离误差累计后地图就无法看了。
2.map-to-map的匹配
即地图与地图之间的匹配,优点是精度高,误差累计小;缺点就是计算量大,实时性压力大。
3.scan-to-map的匹配 即激光雷达扫描数据直接与地图进行匹配,这种方式一边计算位置,
一边把新扫描到的数据及时加入到已有的地图中。他的优缺点都比较适中。

编辑
添加图片注释,不超过 140 字(可选)
LOAM的框架如上所示,其中包括了点云对齐、激光里程计、建图以及对变换矩阵的积分。
总的来说,虽然scan-to-scan匹配精度差但是计算量较小因此我们可以高频执行进而实现粗定位。虽然map-to-map计算量大但是我们可以让其执行的频率降低实现精定位。这样的高低频率结合的里程计就保证了计算量的同时又兼具了精度。这里对粗定位和精定位进行了一个划分,其中粗定位的特点是计算快速,精定位的特点是算的精确。这样相互配合的方式,使得LOAM在当时具备了高精度和低计算量的特点。

编辑切换为居中
添加图片注释,不超过 140 字(可选)
这里有个疑问:为什么程序中可以把公式(1)的分母部分省略掉,是因为分母影响不大?还是说分母能化简成常数从而不需要考虑了?
ans:
说法1:这块没注意过,我猜上面也说了只是一个标准,分母也就是个系数而已,可能是影响阈值。
说法2:为了有效减少计算量,使用前后五个点来进行计算。
编辑切换为居中
添加图片注释,不超过 140 字(可选)
上面这个时间轴要好好理解,k时刻处理的数据会投影到k+1时刻,而k+1时刻收集到的数据也会直接投影到当前坐标系下。
运动补偿:(假设线性运动,使用线性插值来对位置姿态进行计算)

编辑切换为居中
添加图片注释,不超过 140 字(可选)
点云对齐和特征提取:
说法一:点云配准其实说通俗点也可以叫点云对齐,这里提取特征就是为了对齐的时候确定数据关联,可能配准方法的区别就在于采用何种数据关联方式(比如区别于icp的启发式方法),其它差异不大,因此作者就将特征提取和点云配准统一到一起了吧(比如说统一成了“特征法的点云配准”这个概念)。
说法二:特征提取这一块其实在激光雷达slam中,也是可以叫做点云注册的。lidar registration和feature point extraction是一个意思,都是从原始数据中提取特征点信息。
二、SSL-SLAM

编辑切换为居中
添加图片注释,不超过 140 字(可选)
编辑切换为居中
添加图片注释,不超过 140 字(可选)
编辑切换为居中
添加图片注释,不超过 140 字(可选)
八叉树:八叉树及K-D树的应用和实现_viewcode的博客-CSDN博客_八叉树和k-d树结合起来
这里补充:八叉树和kdtree之间的区别,八叉树是把空间均匀地分为8等分然后继续8等分,并且在深度增加的情况下,其占用的内存会上升,导致计算缓慢。而kdtree的划分依据有轮转法或者计算每个维度的协方差来进行比较,这种划分方式并不是等分的,因此kdtree的搜索效率已经在细粒度的数据下能够表现得很好。
注意:也有将八叉树和k-d树结合起来的应用,应用八叉树进行大粒度的划分和查找,而后使用k-d树进行细分,效率会有一定的提升,但其搜索效率变化也与数据量的变化有一个线性关系。也即可以将八叉树和kdtree结合起来使用,但是并不能对所有的场景起作用。
固态雷达和机械雷达:
1、机械雷达:
特点:激光发生器竖直排列并可以360°旋转,通过旋转对四周环境进行全面的扫描。
优点:可以通过物理旋转进行3D扫描,对周遭环境进行全面的覆盖形成点云。其次是分辨率高。
缺点:高频的转动和复杂的机械结构致使其平均的失效时间仅1000-3000小时。
2、纯固态激光雷达

编辑切换为居中
添加图片注释,不超过 140 字(可选)
3、混合固态激光雷达

编辑切换为居中
添加图片注释,不超过 140 字(可选)
编辑切换为居中
添加图片注释,不超过 140 字(可选)
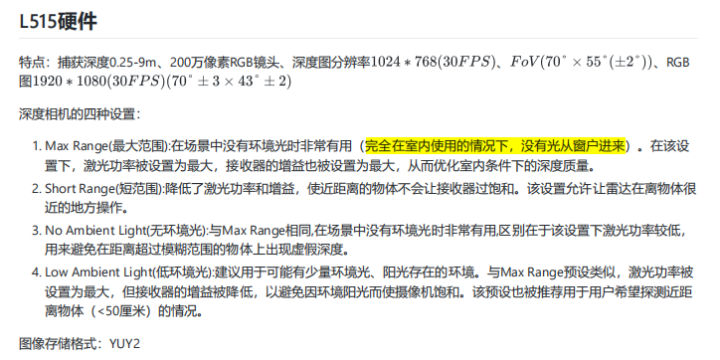
(主要介绍了FOV 深度相机的模式也就是操作方式等内容)