1. 功能说明
在小型云台机械手前方安装近红外传感器,如果近红外触发(检测到有货物),机械手开始抓取货物,并将货物从一个区域搬运到另一个指定区域;否则,机械臂不动作。
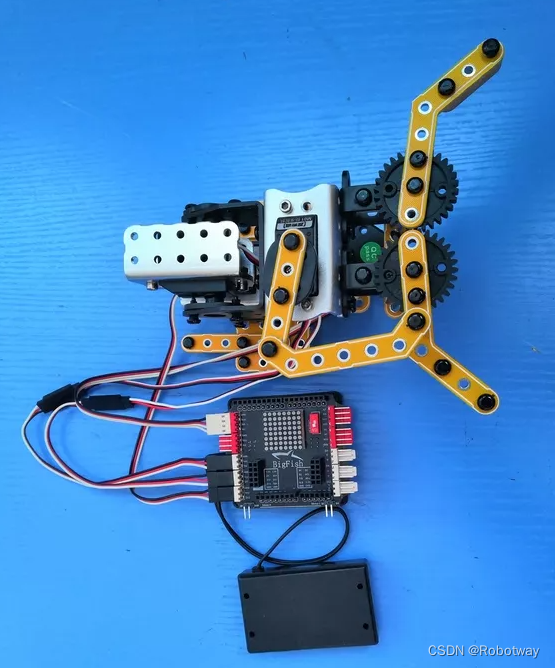
2. 使用样机
本实验使用的样机是用探索者兼容零件制作的。

3. 功能实现
3.1 电子硬件
在这个示例中,采用了以下硬件,请大家参考:

将夹爪、腕关节、底座关节的舵机分别接在扩展板的D4、D7以及D11舵机接口上,近红外传感器接在A0口上。
3.2 编写程序
编写并烧录以下程序(Robotic_arm_three.ino),该程序将实现演示视频中的动作。
编程环境:Arduino 1.8.19
| /******************************************************************************************* 版权说明:Copyright 2022 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved. Distributed under MIT license.See file LICENSE for detail or copy at https://opensource.org/licenses/MIT by 机器谱 2022-12-21 https://www.robotway.com/ --------------------------------------------------------------------------------------- 实验需求: 实现机器人搬运货物。 实现思路: 程序的整体思路为:在机械臂前方安装近红外传感器,如果近红外触发(检测到有货物),机械臂 开始抓取货物,并将货物从一个区域搬运到另一个指定区域;否则,机械臂不动作。 实验接线: 最上端的机械爪舵机接D4; 中间的机械身躯舵机接D7; 最下端的机械底座舵机接D11; 近红外传感器接A0。 ********************************************************************************************/ #include<ServoTimer2.h> #define NearInfraredSensor A0 //定义的近红外感器引脚的引脚 #define Upward_servo_close 66 //机械爪闭合的角度值 #define Upward_servo_open 115 //机械爪张开的角度值 #define Middle_servo_init 85 //机械臂的初始角 #define Middle_servo_left 10 //机械臂向左偏的角度 #define Middle_servo_left1 50 //机械臂向左偏的角度 #define Down_servo_middle 75 //机械底座初始角度值 #define Down_servo_left 5 //机械底座向左偏的角度值 ServoTimer2 myservo[3]; //声明舵机数组; int myservo_pin[3] = { 4, 7, 11 }; //定义三个舵机引脚号; int myservo_angle_init[3] = { Upward_servo_open, Middle_servo_left, Down_servo_middle }; //定义三个舵机的初始角度值; int servo_num = sizeof(myservo_pin) / sizeof(myservo_pin[0]); //得出舵机总数 void setup() { // put your setup code here, to run once: Serial.begin(9600); pinMode(NearInfraredSensor,INPUT); //传感器设置为输入模式; ResetServo(); //初始化舵机角度 delay(2000); } void loop() { // put your main code here, to run repeatedly: int Data_of_Sensor = !digitalRead( NearInfraredSensor ); int Data = 0; if( Data_of_Sensor == 1 ) { //第1次判断近红外是否触发(是否有货物) delay(300); if( !digitalRead( NearInfraredSensor ) ) //第2次判断近红外是否触发(是否有货物) { Grab_And_Release(); //如果检测到有货物,机械臂开始抓取货物; } } else { delay(2); //否则,程序等待; } } void Grab_And_Release() //如果检测到有货物,机械臂开始抓取货物; { ServoMove(1,Middle_servo_left,Middle_servo_init,1500); //机械臂向下降(准备抓取货物) ServoMove(0,Upward_servo_open,Upward_servo_close,1500); //机械爪闭合(抓取货物) ServoMove(1,Middle_servo_init,Middle_servo_left1,1500); //机械臂向上抬 ServoMove(2,Down_servo_middle,Down_servo_left,1500); //机械底座转到物料放置区 ServoMove(1,Middle_servo_left1,Middle_servo_init,1500); //机械臂向下降(准备释放货物) ServoMove(0,Upward_servo_close,Upward_servo_open,1500); //机械爪张开(释放货物) ServoMove(1,Middle_servo_init,Middle_servo_left,1500); //机械臂回复到初始角度 ServoMove(2,Down_servo_left,Down_servo_middle,1500); //机械底座回复到初始角度 } void ResetServo() //初始化舵机角度 { for(int i=0;i<servo_num;i++) { myservo[i].attach(myservo_pin[i]); myservo[i].write( MapAngle(myservo_angle_init[i]) ); } } int MapAngle(int which) //映射函数(将0到180映射到500到2500) { return ( map(which,0,180,500,2500) ); } void ServoGo(int which,int where) //开始驱动舵机(使舵机转动); { myservo[which].write(MapAngle(where)); } void ServoMove(int which,int start,int finish,int t) //舵机转动(舵机从start角度值转到finish角度值需要的时间为t ms) { int a=0; if( ( start - finish ) > 0 ) a = -1; else a = 1; for(int i=0;i<abs(start-finish);i++) { ServoGo(which,start+a*i); delay(t/(abs(start-finish))); } } |
4. 资料下载
① 红外搬运-程序源代码
② 红外搬运-样机3D文件
](https://img-blog.csdnimg.cn/img_convert/2bebde118125eb0db2c884ee7a64608d.jpeg)