原文:A Threshold Selection Method from Gray-Level Histograms
A Fast Algorithm for Multilevel Thresholding
前言
大津法包含两个重要的概念:类间方差(between-class variance)和类内方差(within-class variance)
两者的详细关系推导可后文。
大津法又称为最大类间方差法是有原因的。因为这个算法的目的就是最大化类间方差,且这个最优阈值一定存在。
大津法作为阈值自动分割的经典算法,其思想很巧妙,值得学习。
大津法推导
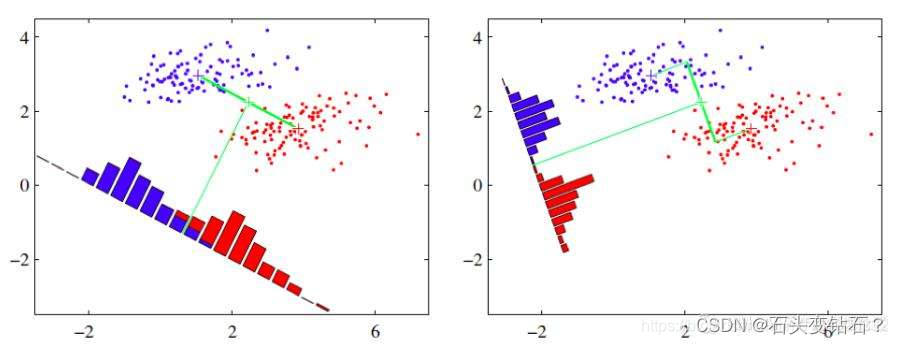
如图所示,右边分割分明,其类间的差异大,区分明显,所以其类间方差更大。
大津法就是要实现这个过程。
我们先做图像的直方图,统计每个很小像素区间包含的像素个数。
即将图像像素值分为 [ 1 , 2 , 3 , …. , L] 个区间。用
n
i
n_{i}
ni 表示各个水平像素值的像素个数,总像素个数与
n
i
n_{i}
ni关系为:
N
=
n
1
+
n
2
+
…
+
n
L
N=n_1+n_2+\ldots+n_L
N=n1+n2+…+nL
像元个数
n
i
ni
ni 比上总像元数 N 即可得到某个像素区间出现的频率,定义
p
i
pi
pi
p
i
=
n
i
/
N
i
,
p
i
≥
0
,
∑
i
=
1
L
p
i
=
1
p_i=n_i / N_i, p_i \geq 0, \sum_{i=1}^L p_i=1
pi=ni/Ni,pi≥0,i=1∑Lpi=1
根据原文,是利用一个阈值 k 把图像分为两类
C
0
、
C
1
。
k
∈
[
1
,
2
,
3
,
…
.
,
L
]
C0 、C1。k∈[ 1 , 2 , 3 , …. , L]
C0、C1。k∈[1,2,3,….,L]
我们分别求出这个阈值前后的局部频率之和,定义如下:
C
0
=
[
1
,
k
]
C
1
=
[
k
+
1
,
L
]
w
0
=
Pr
(
C
0
)
=
∑
i
=
1
k
p
i
=
w
(
k
)
w
1
=
Pr
(
C
1
)
=
∑
i
=
k
+
1
L
p
i
=
1
−
w
(
k
)
\begin{gathered} C_0=[1, k] \\ C_1=[k+1, L] \\ w_0=\operatorname{Pr}\left(C_0\right)=\sum_{i=1}^k p_i=w(k) \\ w_1=\operatorname{Pr}\left(C_1\right)=\sum_{i=k+1}^L p_i=1-w(k) \end{gathered}
C0=[1,k]C1=[k+1,L]w0=Pr(C0)=i=1∑kpi=w(k)w1=Pr(C1)=i=k+1∑Lpi=1−w(k)
则灰度图像频率直方图的总的数学期望和 C0 、C1的数学期望如下:
u
0
=
∑
i
=
1
k
i
∗
Pr
(
i
∣
C
0
)
=
∑
i
=
1
k
i
∗
p
i
/
w
0
=
u
(
k
)
w
(
k
)
u
1
=
∑
i
=
k
+
1
L
i
∗
Pr
(
i
∣
C
1
)
=
∑
i
=
k
+
1
L
i
∗
p
i
/
w
1
=
u
T
−
u
(
k
)
1
−
w
(
k
)
u
T
=
u
(
L
)
=
∑
i
=
1
L
i
∗
p
i
\begin{gathered} u_0=\sum_{i=1}^k i * \operatorname{Pr}\left(i \mid C_0\right)=\sum_{i=1}^k i * p_i / w_0=\frac{u(k)}{w(k)} \\ u_1=\sum_{i=k+1}^L i * \operatorname{Pr}\left(i \mid C_1\right)=\sum_{i=k+1}^L i * p_i / w_1=\frac{u_T-u(k)}{1-w(k)} \\ u_T=u(L)=\sum_{i=1}^L i * p_i \end{gathered}
u0=i=1∑ki∗Pr(i∣C0)=i=1∑ki∗pi/w0=w(k)u(k)u1=i=k+1∑Li∗Pr(i∣C1)=i=k+1∑Li∗pi/w1=1−w(k)uT−u(k)uT=u(L)=i=1∑Li∗pi
上式各个变量之间的关系如下:
w
0
u
0
+
w
1
u
1
=
u
T
w
0
+
w
1
=
1
w_0 u_0+w_1 u_1=u_T \quad w_0+w_1=1
w0u0+w1u1=uTw0+w1=1
期望有了,计算一下对应的方差:
σ
0
2
=
∑
i
=
1
k
(
i
−
u
0
)
2
Pr
(
i
∣
C
0
)
=
∑
i
=
1
k
(
i
−
u
0
)
2
p
i
/
w
0
σ
1
2
=
∑
i
=
k
+
1
L
(
i
−
u
1
)
2
Pr
(
i
∣
C
1
)
=
∑
i
=
k
+
1
L
(
i
−
u
1
)
2
p
i
/
w
0
σ
T
2
=
∑
i
=
1
L
(
i
−
u
T
)
2
p
i
\begin{gathered} \sigma_0^2=\sum_{i=1}^k\left(i-u_0\right)^2 \operatorname{Pr}\left(i \mid C_0\right)=\sum_{i=1}^k\left(i-u_0\right)^2 p_i / w_0 \\ \sigma_1^2=\sum_{i=k+1}^L\left(i-u_1\right)^2 \operatorname{Pr}\left(i \mid C_1\right)=\sum_{i=k+1}^L\left(i-u_1\right)^2 p_i / w_0 \\ \sigma_T^2=\sum_{i=1}^L\left(i-u_T\right)^2 p_i \end{gathered}
σ02=i=1∑k(i−u0)2Pr(i∣C0)=i=1∑k(i−u0)2pi/w0σ12=i=k+1∑L(i−u1)2Pr(i∣C1)=i=k+1∑L(i−u1)2pi/w0σT2=i=1∑L(i−uT)2pi
根据文献:Introduction to statistical pattern recognition,260-267。类内误差、类间误差、总误差有如下关系:
类内误差
σ
w
2
=
w
0
σ
0
2
+
w
1
σ
1
2
类内误差 \sigma_w^2=w_0 \sigma_0^2+w_1 \sigma_1^2
类内误差σw2=w0σ02+w1σ12
类间误差
σ
b
2
=
w
0
(
u
0
−
u
T
)
2
+
w
1
(
u
1
−
u
T
)
2
类间误差\sigma_b^2=w_0\left(u_0-u_T\right)^2+w_1\left(u_1-u_T\right)^2
类间误差σb2=w0(u0−uT)2+w1(u1−uT)2
总误差
σ
w
2
+
σ
b
2
=
σ
T
2
总误差\sigma_w^2+\sigma_b^2=\sigma_T^2
总误差σw2+σb2=σT2
注意:总误差是与阈值k无关的,但类间误差和类内误差是与阈值k相关的函数
σ
b
2
=
w
0
(
u
0
−
u
T
)
2
+
w
1
(
u
1
−
u
T
)
2
=
w
0
(
u
0
−
(
w
0
u
0
+
w
1
u
1
)
)
2
+
w
1
(
u
1
−
(
w
0
u
0
+
w
1
u
1
)
)
2
=
w
0
w
1
(
u
1
−
u
0
)
2
\begin{gathered} \sigma_b^2=w_0\left(u_0-u_T\right)^2+w_1\left(u_1-u_T\right)^2 \\ =w_0\left(u_0-\left(w_0 u_0+w_1 u_1\right)\right)^2+w_1\left(u_1-\left(w_0 u_0+w_1 u_1\right)\right)^2 \\ =w_0 w_1\left(u_1-u_0\right)^2 \end{gathered}
σb2=w0(u0−uT)2+w1(u1−uT)2=w0(u0−(w0u0+w1u1))2+w1(u1−(w0u0+w1u1))2=w0w1(u1−u0)2
然后再分别把w0,u1,u0带入,可得到:
σ
b
2
=
[
u
T
w
(
k
)
−
u
(
k
)
]
2
w
(
k
)
[
1
−
w
(
k
)
]
\sigma_b^2=\frac{\left[u_T w(k)-u(k)\right]^2}{w(k)[1-w(k)]}
σb2=w(k)[1−w(k)][uTw(k)−u(k)]2
则求解最大类间误差为:
σ
b
2
(
k
∗
)
=
max
1
≤
k
<
L
σ
b
2
(
k
)
\sigma_b^2\left(k^*\right)=\max _{1 \leq k<L} \sigma_b^2(k)
σb2(k∗)=1≤k<Lmaxσb2(k)
由上述
σ
b
2
\sigma_b^2
σb2 的分母可以发现,
w
(
k
)
w(k)
w(k) 可以取到 1 也可以取到0,因此在边界上
σ
b
2
\sigma_b^2
σb2 可以无穷大,而在开基
(
0
,
1
)
(0,1)
(0,1) 则类间方差有限,因此在定义域
S
∗
=
k
:
w
0
w
1
=
w
(
k
)
[
1
−
w
(
k
)
]
>
0
S^*=k: w_0 w_1=w(k)[1-w(k)]>0
S∗=k:w0w1=w(k)[1−w(k)]>0
因此必定存在一个阈值k使得两类类间方差最大。
以下是python代码实现:
def otsu(gray_img):
n_count = gray_img.size
gray_img_array = gray_img.flatten()
index = np.flatnonzero(gray_img_array)
gray_img_data = gray_img_array[index]
threshold_t = 0
max_g = 0
t = np.linspace(start=-1, stop=1, num=256)
# 遍历每一个灰度层
for i in range(len(t)):
# 使用numpy直接对数组进行运算
n0 = gray_img_data[np.where(gray_img_data < t[i])]
n1 = gray_img_data[np.where(gray_img_data >= t[i])]
w0 = len(n0) / n_count
w1 = len(n1) / n_count
u0 = np.mean(n0) if len(n0) > 0 else 0.
u1 = np.mean(n1) if len(n0) > 0 else 0.
g = w0 * w1 * (u0 - u1) ** 2
if g > max_g:
max_g = g
threshold_t = t[i]
print('类间方差最大阈值:', threshold_t)
gray_img[gray_img < threshold_t] = 0
gray_img[gray_img >= threshold_t] = 1
return gray_img
这个在opencv中已经有实现,可以直接调用
import cv2
t, otsu = cv2.threshold(img, 0, 255, cv2>THRESH_BINARY + cv2.THRESH_OTSU)
多分类最大类间方差法
根据以上公式类推到多分类的最大类间方差法,假设有
m
−
1
\mathrm{m}-1
m−1 个阈值
{
t
1
,
t
2
,
…
,
t
M
−
1
}
\{\mathrm{t} 1, \mathrm{t} 2, \ldots, \mathrm{tM}-1\}
{t1,t2,…,tM−1} 将图像分为
M
\mathrm{M}
M 类,
C
1
C_1
C1 ,
C
2
…
C
M
C_2 \ldots C_M
C2…CM 。 则存在一组阈值
{
t
1
∗
,
t
2
∗
,
…
,
t
M
−
1
∗
}
\left\{t 1^*, \mathrm{t} 2^*, \ldots, \mathrm{tM}-1^*\right\}
{t1∗,t2∗,…,tM−1∗} 使得
{
t
1
∗
,
t
2
∗
,
…
,
t
M
−
1
∗
}
=
Arg
Max
{
σ
B
2
(
t
1
,
t
2
,
…
,
t
M
−
1
)
}
,
1
≤
t
1
<
…
<
t
M
−
1
<
L
\begin{aligned} \left\{\mathrm{t}_1 *, \mathrm{t}_2 *, \ldots, \mathrm{t}_{\mathrm{M}-1} *\right\}= & \operatorname{Arg} \operatorname{Max}\left\{\sigma_{\mathrm{B}}{ }^2\left(\mathrm{t}_1, \mathrm{t}_2, \ldots, \mathrm{t}_{\mathrm{M}-1}\right)\right\}, \\ & 1 \leq \mathrm{t}_1<\ldots<\mathrm{t}_{\mathrm{M}-1}<\mathrm{L} \end{aligned}
{t1∗,t2∗,…,tM−1∗}=ArgMax{σB2(t1,t2,…,tM−1)},1≤t1<…<tM−1<L
成立
其中:
σ
B
2
=
∑
k
=
1
M
ω
k
(
μ
k
−
μ
T
)
2
ω
k
=
∑
i
∈
C
k
p
i
,
μ
k
=
∑
i
∈
C
k
i
p
i
/
ω
(
k
)
.
\begin{aligned} \sigma_{\mathrm{B}}{ }^2 & =\sum_{k=1}^{\mathrm{M}} \omega_{\mathrm{k}}\left(\mu_{\mathrm{k}}-\mu_{\mathrm{T}}\right)^2 \\ \omega_{\mathrm{k}} & =\sum_{\mathrm{i} \in \mathrm{Ck}} \mathrm{p}_{\mathrm{i}}, \\ \mu_{\mathrm{k}} & =\sum_{\mathrm{i} \in \mathrm{Ck}} \mathrm{i} \mathrm{p}_{\mathrm{i}} / \omega(\mathrm{k}) . \end{aligned}
σB2ωkμk=k=1∑Mωk(μk−μT)2=i∈Ck∑pi,=i∈Ck∑ipi/ω(k).
因为
∑
k
=
1
M
ω
k
=
1
μ
T
=
∑
k
=
1
M
ω
k
μ
k
.
\begin{gathered} \sum_{k=1}^{\mathrm{M}} \omega_{\mathrm{k}}=1 \\ \mu_{\mathrm{T}}=\sum_{k=1}^{\mathrm{M}} \omega_{\mathrm{k}} \mu_{\mathrm{k}} . \end{gathered}
k=1∑Mωk=1μT=k=1∑Mωkμk.
因此
σ
B
2
(
t
1
,
t
2
,
…
,
t
M
−
1
)
=
∑
k
=
1
M
ω
k
μ
k
2
−
μ
T
2
\sigma_{\mathrm{B}}{ }^{2}\left(\mathrm{t}_{1}, \mathrm{t}_{2}, \ldots, \mathrm{t}_{\mathrm{M}-1}\right)=\sum_{k=1}^{\mathrm{M}} \omega_{\mathrm{k}} \mu_{\mathrm{k}}^{2}-\mu_{\mathrm{T}}{ }^{2}
σB2(t1,t2,…,tM−1)=k=1∑Mωkμk2−μT2
μ
T
\mu \mathrm{T}
μT 与间值无关,因此求上式的最大值可转为:
{
t
1
∗
,
t
2
∗
,
…
,
t
M
−
1
∗
}
=
Arg
Max
{
(
σ
B
′
)
2
{
{
t
1
,
t
2
,
…
,
t
M
−
1
}
}
1
≤
t
1
<
…
<
t
M
−
1
<
L
(
σ
B
)
2
=
∑
k
=
1
M
ω
k
μ
k
2
\begin{array}{c} \left\{\mathrm{t}_{1}^{*}, \mathrm{t}_{2}^{*}, \ldots, \mathrm{t}_{\mathrm{M}-1}^{*}\right\}=\operatorname{Arg} \operatorname{Max}\left\{\left(\sigma_{\mathrm{B}}{ }^{\prime}\right)^{2}\left\{\left\{\mathrm{t}_{1}, \mathrm{t}_{2}, \ldots, \mathrm{t}_{\mathrm{M}-1}\right\}\right\}\right. \\ 1 \leq \mathrm{t}_{1}<\ldots<\mathrm{t}_{\mathrm{M}-1}<\mathrm{L} \\ \left(\sigma_{\mathrm{B}}\right)^{2}=\sum_{k=1}^{\mathrm{M}} \omega_{\mathrm{k}} \mu_{\mathrm{k}}{ }^{2} \end{array}
{t1∗,t2∗,…,tM−1∗}=ArgMax{(σB′)2{{t1,t2,…,tM−1}}1≤t1<…<tM−1<L(σB)2=∑k=1Mωkμk2
类间方差、类内方差和总方差关系
https://blog.csdn.net/qq_42164483/article/details/119064535
https://blog.csdn.net/m0_38024332/article/details/104226806
以上这两篇博文讲的也很详细,内容有所参考,欢迎访问阅读。