python-opencv轮廓检测(外轮廓检测和全部轮廓检测,计算轮廓面积和周长)
通过cv2.findContours,我们可以进行轮廓检测,当然也有很多检测模式,我们可以通过选择检测模式,进行外轮廓检测,或者全部轮廓检测等等,可以实现不同的需求。
另外opencv也封装了计算轮廓面积和周长的函数,注意,轮廓基本上都是点组成的,也就是说,我们可以通过opencv封装的函数计算一堆点集的周长和面积。
print(cv2.contourArea(cnt))#输出面接
print(cv2.arcLength(cnt,True))#True闭合的周长,输出周长
cnt为轮廓点集,这个函数,以后博主觉得是有很大实用效果的。
代码如下:
from ctypes.wintypes import SIZE
from multiprocessing.pool import IMapUnorderedIterator
import cv2
import copy
import math
import matplotlib.pyplot as plt
import matplotlib as mpl
import numpy as np
import os
path=r'D:\learn\photo\cv\contours.png'
img=cv2.imread(path,1)
img_gray=cv2.imread(path,0)
def cv_show(name,img):
cv2.imshow(name,img)
#cv2.waitKey(0),接收0,表示窗口暂停
cv2.waitKey(0)
#销毁所有窗口
cv2.destroyAllWindows()
#cv_show('img_gray',img_gray)
#进行二值化处理
ret,binary=cv2.threshold(img_gray,127,255,cv2.THRESH_BINARY)
#cv_show('dist',dist)
def BGR_TO_RGB(img):
return img[:,:, ::-1]
#检测轮廓
#取值一:CV_RETR_EXTERNAL只检测最外围轮廓,包含在外围轮廓内的内围轮廓被忽略
# 取值二:CV_RETR_LIST 检测所有的轮廓,包括内围、外围轮廓,但是检测到的轮廓不建立等级关
# 系,彼此之间独立,没有等级关系,这就意味着这个检索模式下不存在父轮廓或内嵌轮廓,
# 所以hierarchy向量内所有元素的第3、第4个分量都会被置为-1,具体下文会讲到
# 取值三:CV_RETR_CCOMP 检测所有的轮廓,但所有轮廓只建立两个等级关系,外围为顶层,若外围
# 内的内围轮廓还包含了其他的轮廓信息,则内围内的所有轮廓均归属于顶层
# 取值四:CV_RETR_TREE, 检测所有轮廓,所有轮廓建立一个等级树结构。外层轮廓包含内层轮廓,内
# 层轮廓还可以继续包含内嵌轮廓。
#countourClose 轮廓坐标信息
#hierrachyclose 轮廓之间的层次结构
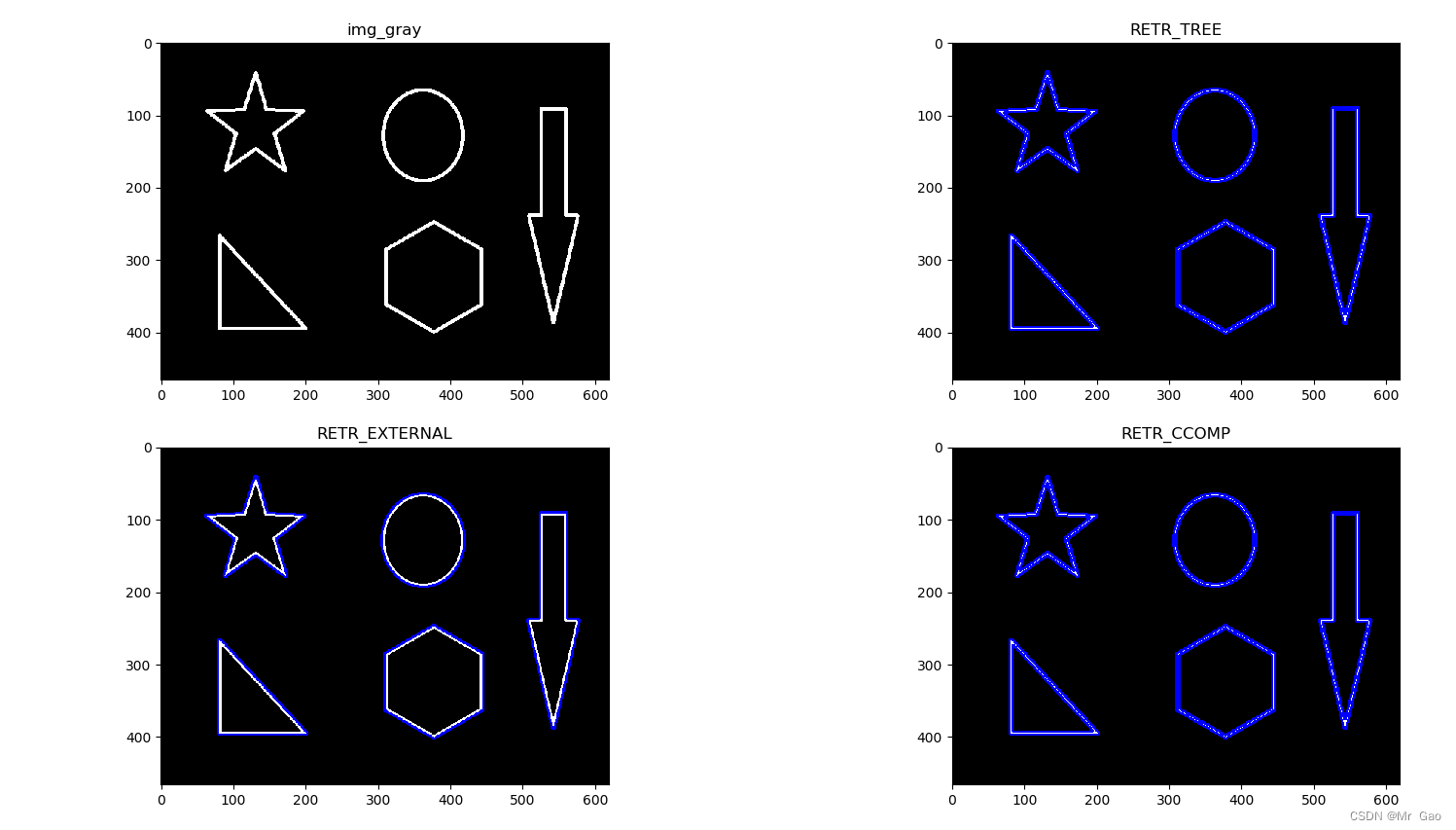
countourClose,hierrachyclose=cv2.findContours(binary,cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_SIMPLE)
result2=cv2.drawContours(img.copy(),countourClose,-1,(0,0,255),2)
#CV_RETR_CCOMP 检测所有的轮廓,但所有轮廓只建立两个等级关系,外围为顶层,若外围
# 内的内围轮廓还包含了其他的轮廓信息,则内围内的所有轮廓均归属于顶层
countourClose,hierrachyclose=cv2.findContours(binary,cv2.RETR_CCOMP,cv2.CHAIN_APPROX_SIMPLE)
result3=cv2.drawContours(img.copy(),countourClose,-1,(0,0,255),2)
countourClose,hierrachyclose=cv2.findContours(binary,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)
result=cv2.drawContours(img.copy(),countourClose,-1,(0,0,255),2)
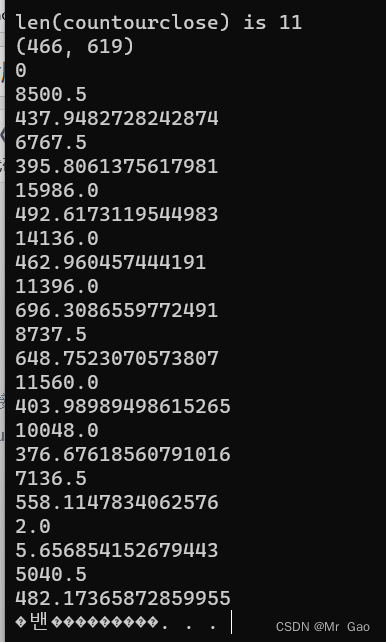
print("len(countourclose) is",len(countourClose))
#
plt.figure(figsize=(400,600))
print(img_gray.shape)
print(img_gray[0][0])
plt.subplot(221)
#img_gray=BGR_TO_RGB(img_gray,'gray')
plt.imshow(img_gray,'gray')
plt.title('img_gray')
plt.subplot(222)
plt.imshow(result,'gray')
plt.title('RETR_TREE')
plt.subplot(223)
plt.imshow(result2,'gray')
plt.title('RETR_EXTERNAL')
plt.subplot(224)
plt.imshow(result3,'gray')
plt.title('RETR_CCOMP')
plt.show()
#输出面接和周长
for i in range(len(countourClose)):
cnt=countourClose[i]
print(cv2.contourArea(cnt))#输出面接
print(cv2.arcLength(cnt,True))#True闭合的周长,输出周长
os.system("pause")
运行结果如下: