文章目录
- 1. 集合约束式的指针分析
- 1.1 基本介绍
- 1.2 求解约束
- 1.2.1 图传播
- 1.2.2 迭代顺序
- 1.2.3 节点替换 (Variable Subsititution)
- 1.2.4 传递化简 (Transitive Reduction)
- 1.2.5 集合的表示
- 1.2.6 差分传播
- 1.2.7 相同解的集合
- 2. 扩展约束模型
- 2.1 简介
- 2.2 处理函数指针
- 2.3 处理字段
- 2.4 处理堆
- 2.5 处理指针算数和数组
- 3. 算法

接上文;上文(CFL-Reachability求解Andersen指针分析)主要介绍了将Andersen式指针分析问题转换为CFL-Reachability问题,然后进行求解。本文介绍介绍另一篇Andersen式指针分析,作者提出的方法是字段敏感的。
我看这篇文章的动机是:
- 它被用在GCC编译器的指针分析中,Go语言指针分析中
- 我觉得这篇文章里面讲的一些求解方法很经典
- C的字段敏感指针分析我看得并不多
这篇文章最初发表在PASTE’04,在2007年又以一个更详细的版本发表在TOPLAS’07。
作者提出的方法对
结构体变量和间接函数调用进行建模。它是流不敏感,上下文不敏感,字段敏感的。
1. 集合约束式的指针分析
1.1 基本介绍
Set-Constraints指针分析,也叫Andersen式指针分析,inclusion-based指针分析。约束可以用如下形式来描述:

在对程序进行分析时,根据程序的语意,收集相应的约束,表示成上述所示的约束
- 程序中每个变量,都有一个唯一的约束变量与之对应
- 每个变量都包含一个集合,表示它所指向的位置
- 程序的赋值也转换成上述的约束形式
得到约束之后,能够通过如下所示的推导规则来得到每个变量最终的指向状态。

看起来比较简洁。这里以一个例子为描述:
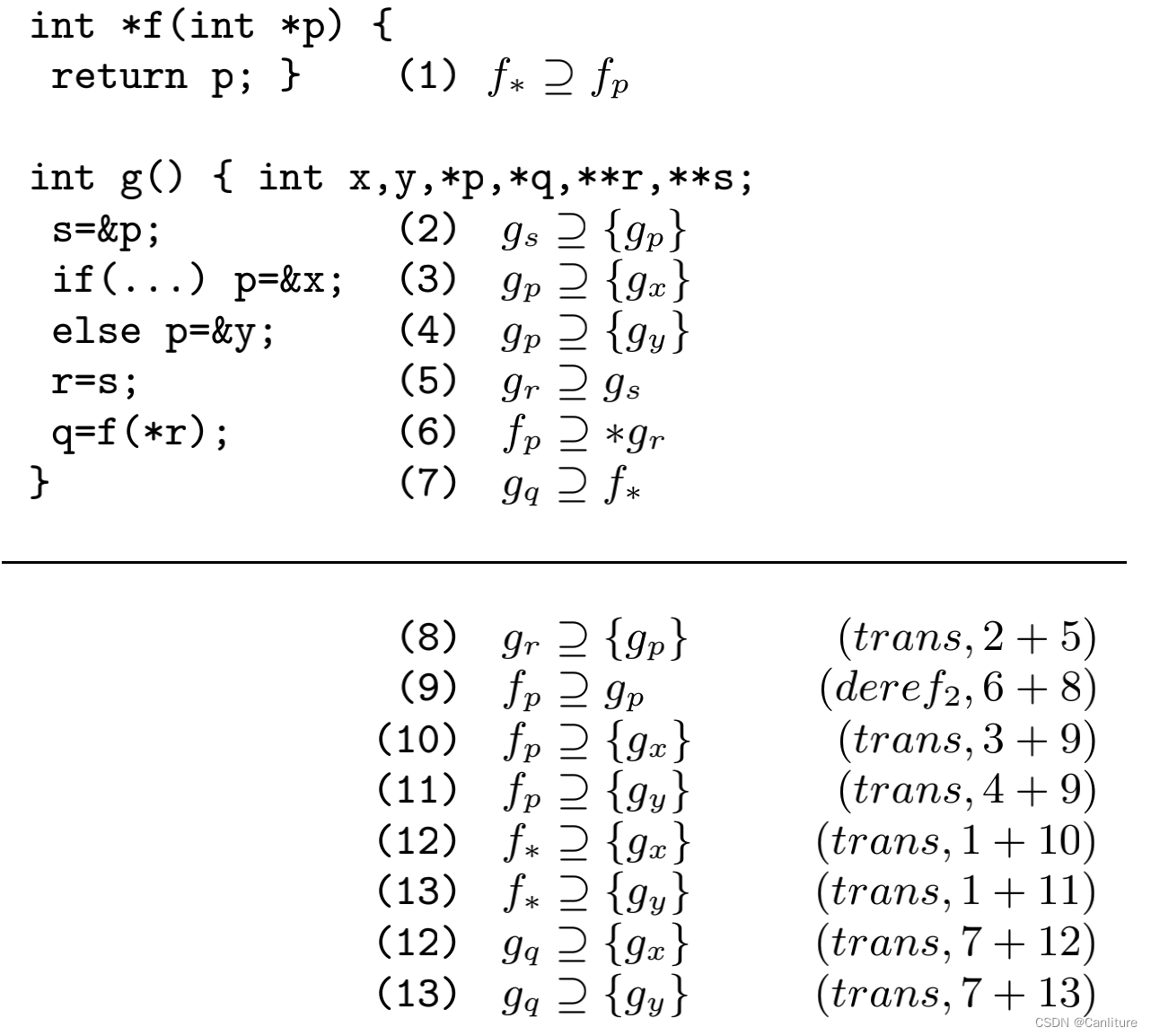
- (1) ~ (7):根据程序的语意来收集的约束关系。
- 约束变量以
函数名 + 变量名下标来唯一表示
- 约束变量以
- (8) ~ (13):根据推导规则,得到进一步的约束关系
1.2 求解约束
给定一个程序,然后构造了上述约束,如何进行求解,得到变量最终的指向状态?
首先,给出求解时间,再给出求解方法。
约束系统中存在
t个约束,它能够以 O ( t 3 ) O(t^3) O(t3) 时间进行求解
证明:
- v是变量数目,那么生成的简单约束 ($p \supseteq {q} $) 的上界数为 O ( v 2 ) O(v^2) O(v2)
- 最多 O ( v 2 ) O(v^2) O(v2) 种简单约束可能性 ( p ⊇ q p \supseteq q p⊇q )
- 最多有v个简单约束能够通过trans规则在每个简单约束之间传播,应用trans最多 O ( v 3 ) O(v^3) O(v3) 次。
- 每个解引用的变量最多 O ( v ) O(v) O(v) 个targets,复杂约束规则只能应用 O ( t v ) O(tv) O(tv) 次
- v就是O(t),所以 O ( t 3 ) O(t^3) O(t3) 上界
作者提到:他提出的字段敏感算法是 O ( v 4 ) O(v^4) O(v4)
这里讨论一些高效求解约束的方法。
当然,最简单的方法就是用一个 while(changed) 循环盲目地迭代,直到不动点。
1.2.1 图传播
核心思想就是将约束表示成有向图。
- 每个约束变量表示成图上唯一的节点
- p ⊇ q p \supseteq q p⊇q 表示成图上 p ← q p \leftarrow q p←q 边
每个节点关联一个解(points-to set)的集合,叫做 S o l ( n ) Sol(n) Sol(n)
例如之前的例子可以用下图来表示:
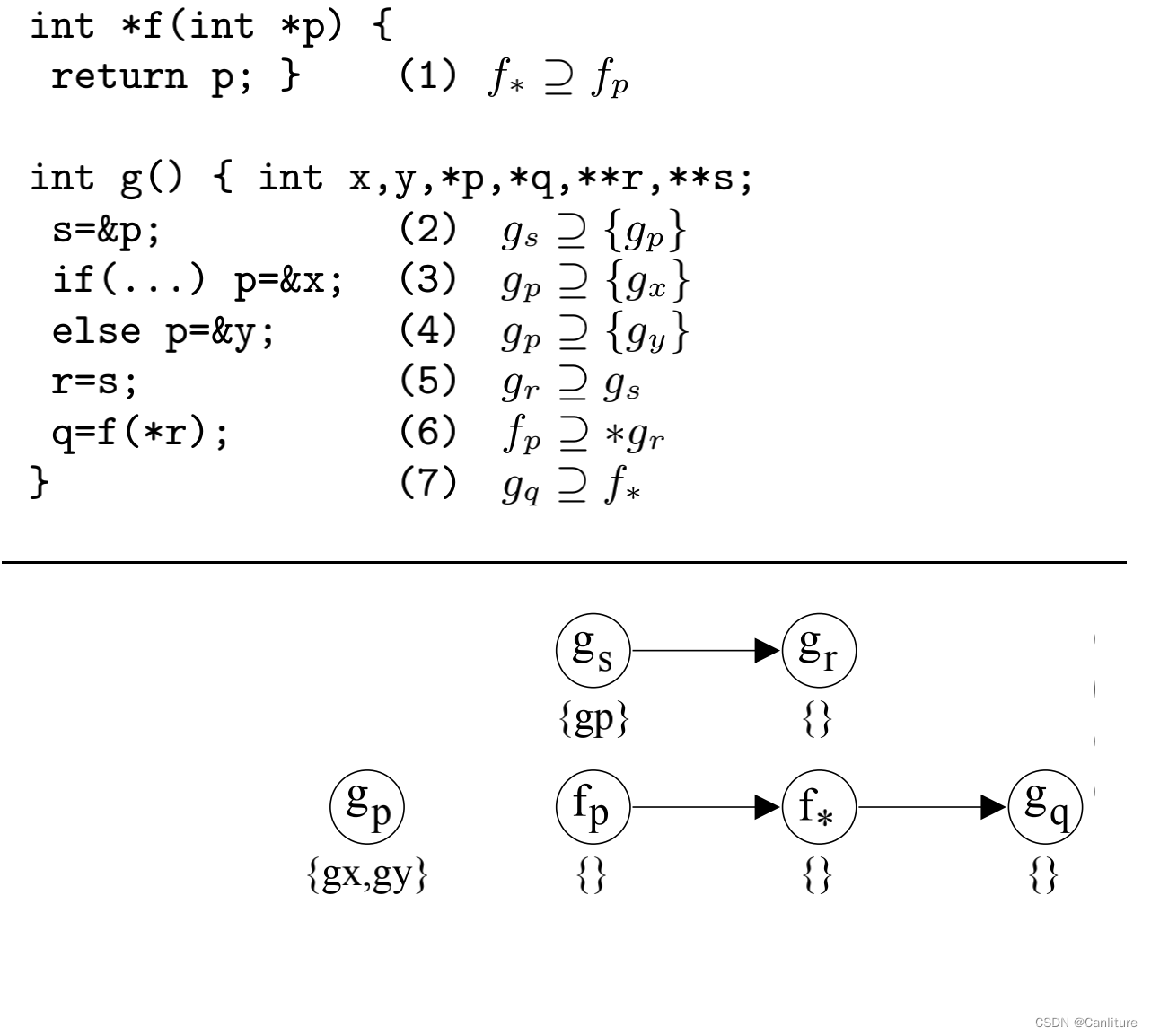
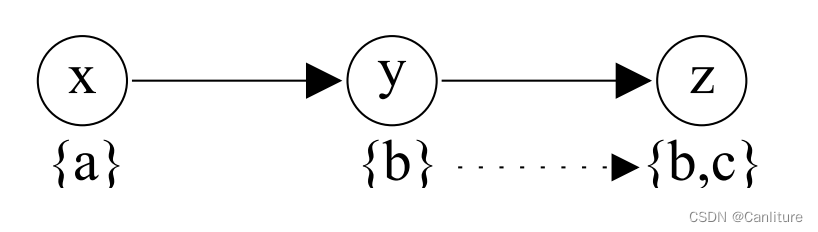
图的最初状态只处理这种规则
n
⊇
{
x
}
n \supseteq \{x\}
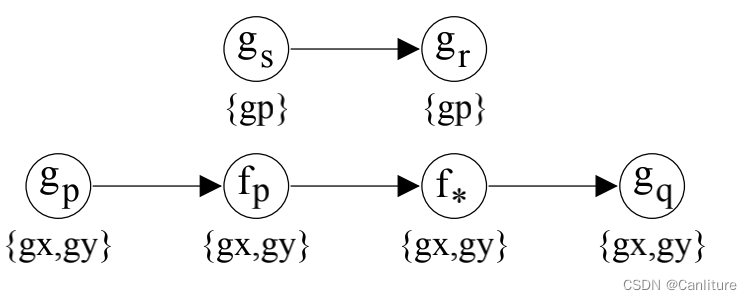
n⊇{x} 。通过worklist算法,不断沿着边传递
S
o
l
(
n
)
Sol(n)
Sol(n) 到后继节点。最终得到的解为:
worklist处理细节:
∗
n
⊇
q
*n \supseteq q
∗n⊇q:$\forall v \in Sol(n), 添加边v \leftarrow q $ ;其它情况类似的处理方式。
1.2.2 迭代顺序
节点被访问的顺序 (从worklist中拎出来的顺序),会影响迭代效率。
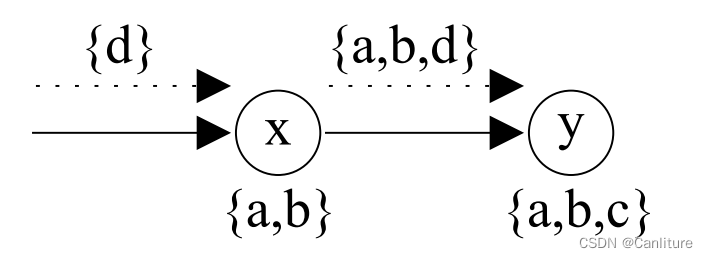
例如,对于如下状态:
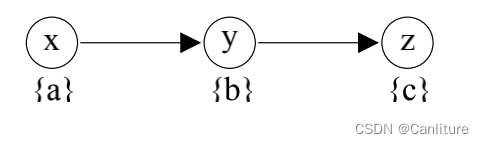
如果我们从worklist中挑出节点y进行迭代传播,就像这样:
现在再挑出节点x进行传播,很显然,会重新传播y节点的值。 如果一开始就挑出x进行传播,那么显然传播的次数少一些。
1.2.3 节点替换 (Variable Subsititution)
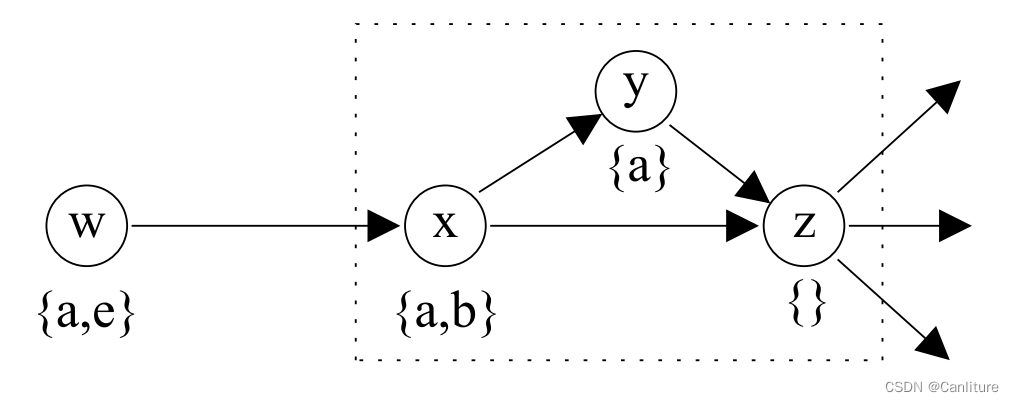
观察到,如果一些变量一定有相同的解,那么,可以将它替换成一个节点,这样就降低图的大小,减少传播次数。
第一种情况如下,{x, y, z} 可以用单个节点替换。
- 关键的思想就是y,z没有被取地址,并且没有这样的形式
y
⊇
∗
p
y \supseteq *p
y⊇∗p
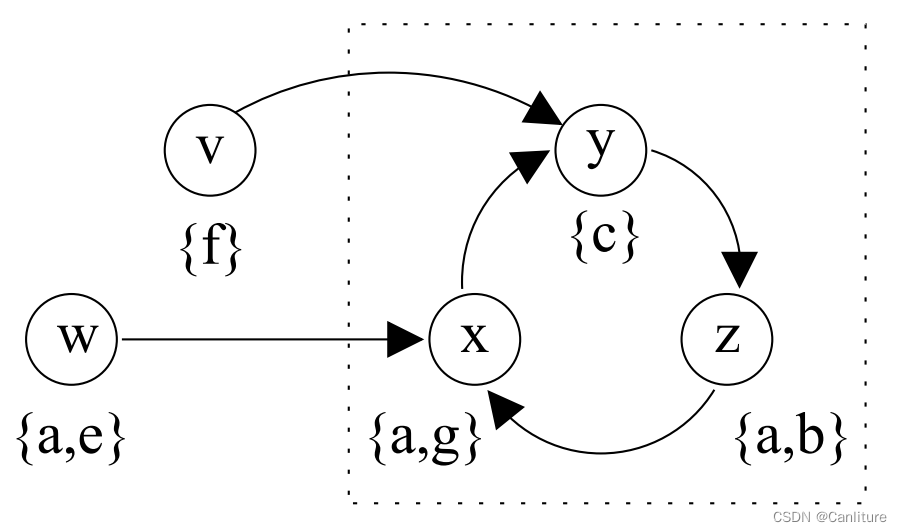
第二种情况就是强连通分量 (Strongly Connected Component)。
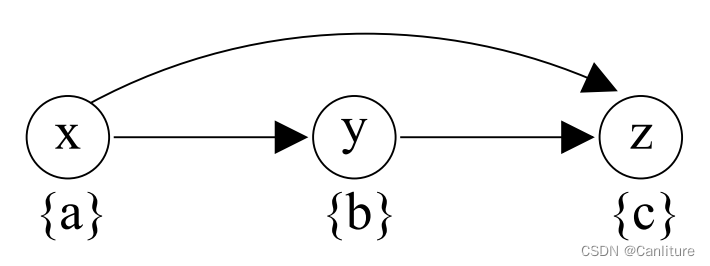
1.2.4 传递化简 (Transitive Reduction)
从图上消除传递边,
x
→
z
x \rightarrow z
x→z 可以消除,但是并不会影响最终解,而且还能够提升性能(执行更少的并集操作)。
并没有高效地方法来识别这种可化简的传递边( 已有方法是 O ( n 2 ) O(n^2) O(n2) )。但是能够识别一些这样的边,仍然很有用。
1.2.5 集合的表示
一般集合会实现成BitVector,Sorted Array,Binary Tree。最好的实现是BitVector混合Sorted Array方法。
1.2.6 差分传播
可参考南京大学软件分析中指针分析算法,里面也提到了 Δ \Delta Δ 传播
Difffference propagation的意思就是只传播改变的那部分集合到后继节点,这样能够避免重新传播冗余的信息。
构造一个$\Delta = {d} $ ,而非传播整个集合过去。 (作者说BitVector表示并不会加速)
1.2.7 相同解的集合
很多时候迭代到后面,许多变量拥有相同解,作者发现,一般情况下,如果能把相同的集合用哈希表共享,那么能够节约内存,提升求解器整体的执行时间。
2. 扩展约束模型
2.1 简介
上面的约束模型只能够处理简单的变量,以及解引用。这里扩展到函数间接调用 (函数指针),字段敏感
扩展后的约束,用如下形式来表示:

简单解释:
- k为常数
- 当k=0时,与原来的模型是等效的
- *(p + k)表示: ∀ s ∈ S o l ( q ) , 然后 ∗ ( s + k ) \forall s \in Sol(q), 然后 *(s + k) ∀s∈Sol(q),然后∗(s+k)
对应的推导规则如下:
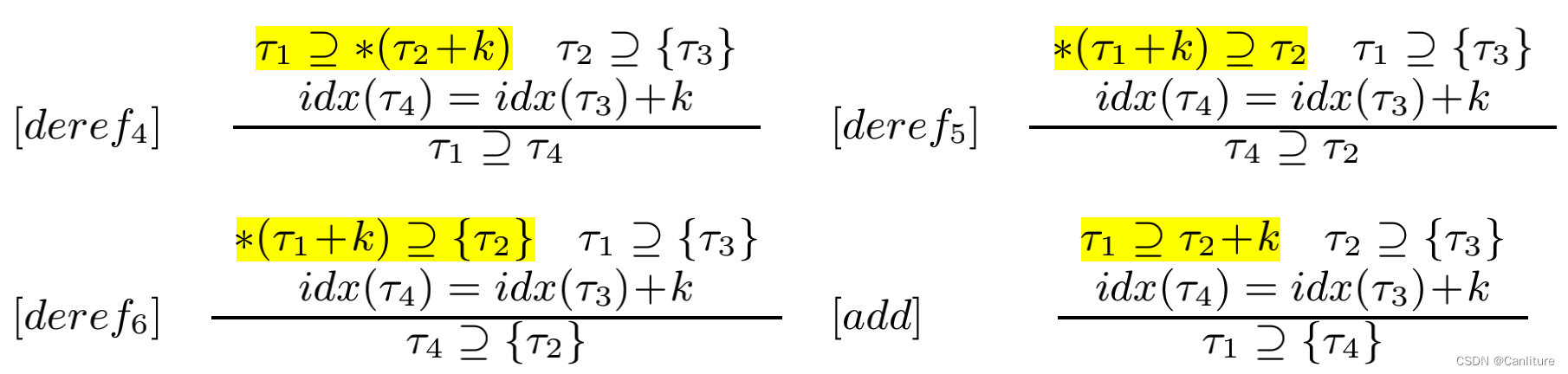
其中
- idx为:映射变量到它的索引
- add规则用于处理这种情况: q = & ( b − > f 2 ) q = \&(b->f2) q=&(b−>f2)
用图形表示这种约束关系,可以用带权图(边上标注k值)
- p ⊇ q + k p \supseteq q +k p⊇q+k ,引入边 q → p , 边上权值 k q \rightarrow p, 边上权值k q→p,边上权值k
2.2 处理函数指针
对于函数指针,将函数的第一个参数的索引 (第一个参数的索引) 作为它的索引。
这里是一个例子,主要关注于:
- (1). 函数f的第一个参数p的index为0
- (8). 处理函数的关键就是将函数的index视为该函数第一个参数的index
- (10)(11). 上下文不敏感
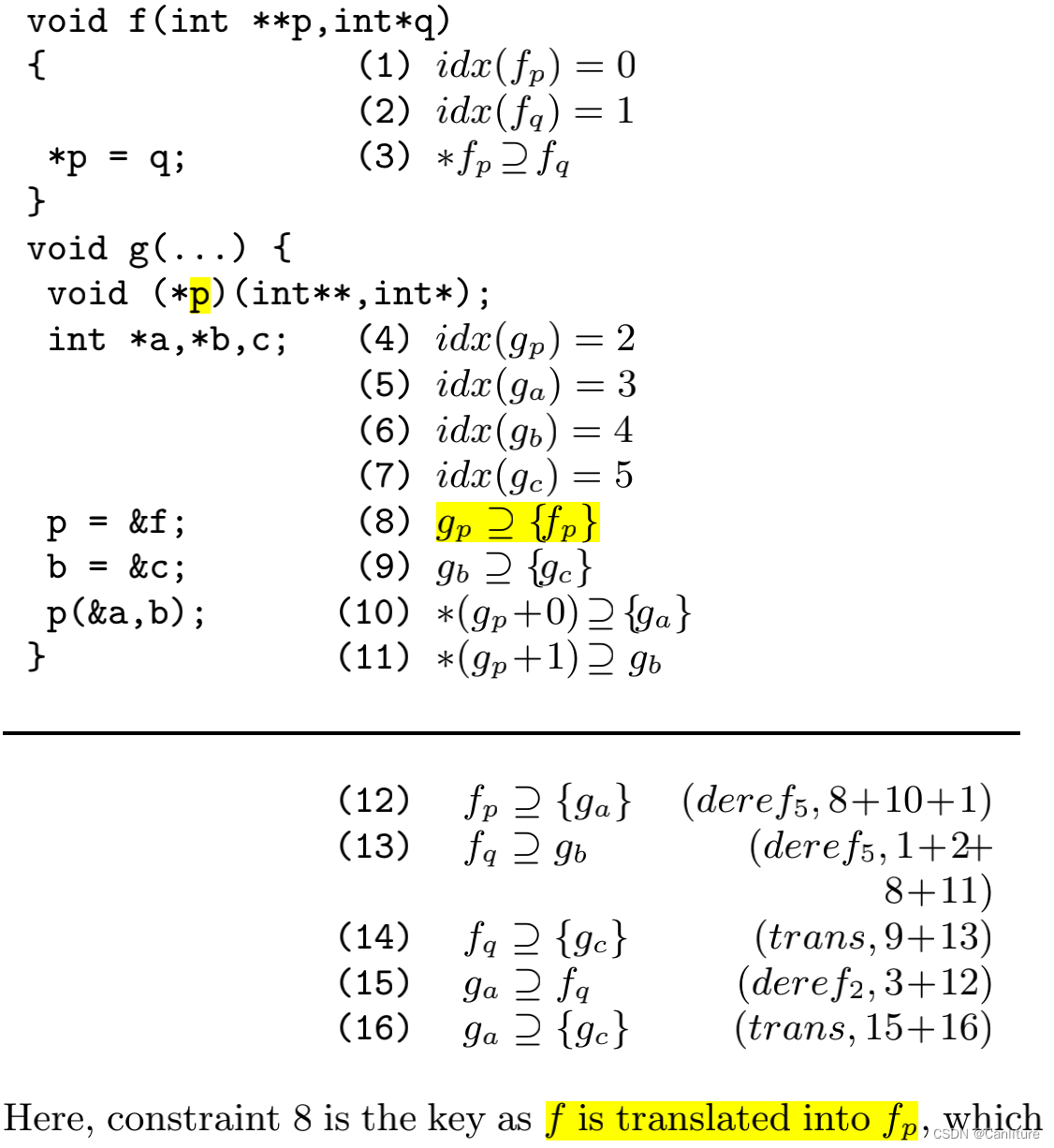
这样处理仍然会存在一个问题,就是不合理的类型转换,例如如下代码:
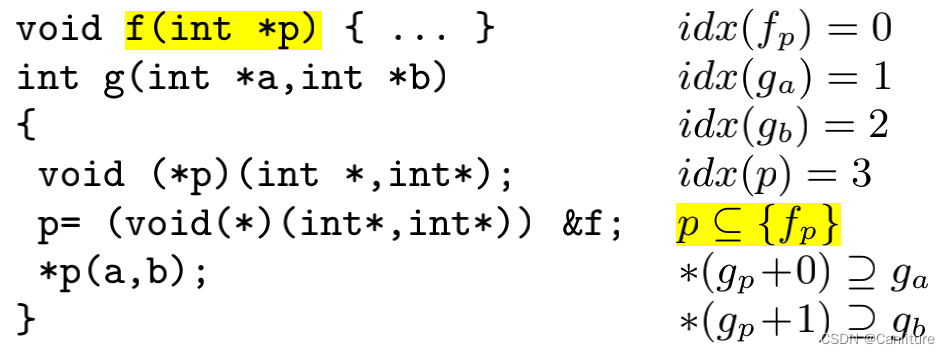
在处理最后一条约束时,会导致 g a ⊇ b g_a \supseteq b ga⊇b ,因为 i d x ( g a ) = i d x ( f p ) + 1 idx(g_a) = idx(f_p) + 1 idx(ga)=idx(fp)+1。通过对每个变量限制它的端点(end)索引,可以避免不想要的传播。每个变量有一个end, e n d ( f p ) = 0 , e n d ( g a ) = e n d ( g b ) = 2 end(f_p) = 0, end(g_a) = end(g_b) = 2 end(fp)=0,end(ga)=end(gb)=2,所以对于 i d x ( ∗ ( g p + 1 ) ) > e n d ( ∗ g p ) idx(*(g_p + 1)) > end(*g_p) idx(∗(gp+1))>end(∗gp) 这种情况,可以不做传播。
2.3 处理字段
与Java相比,Java不允许取字段的地址。
有3种方法来处理字段:field-insensitive, field-based, field-sensitive。他们的区别是:
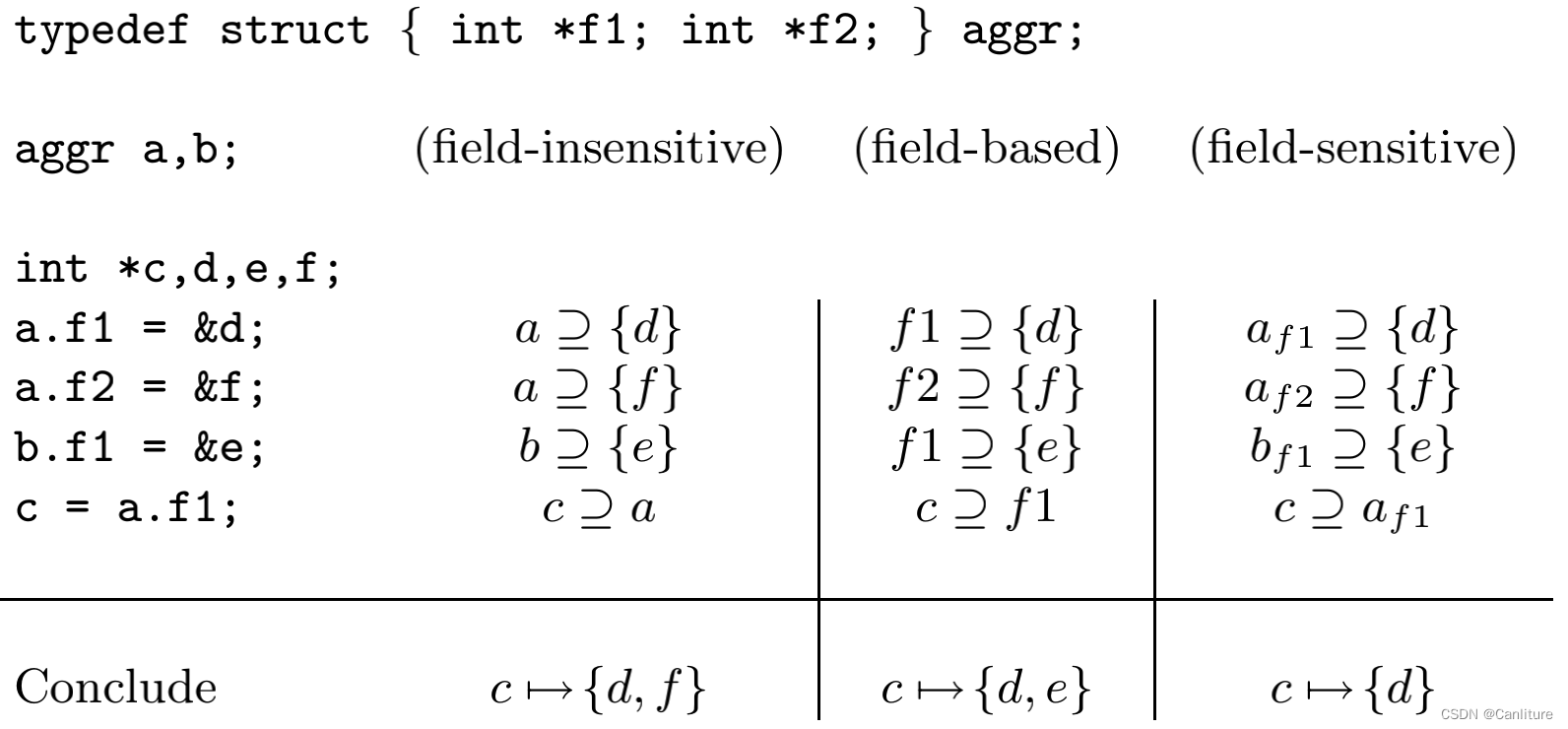
下面看作者怎么对字段建模的:

看起来很容易理解,就是给结构体每个字段变量编个号。
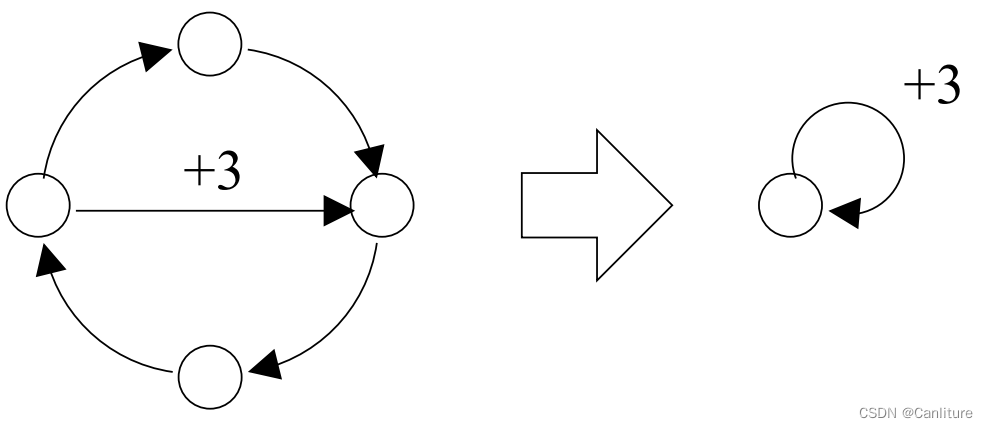
存在的一个问题就是 Positive Weight Cycle (PWC) 问题。这种环会导致求解时不终止,也就是不断地+1,+1 传播…

可以使用上文所说的end,来限制自增后的边界索引。
另外就是折叠环。如果所有节点间都存在一条0权路径。那么能够折叠成一个自环节点。
2.4 处理堆
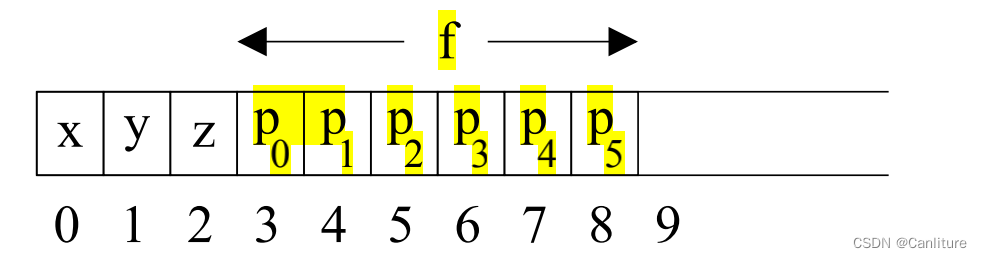
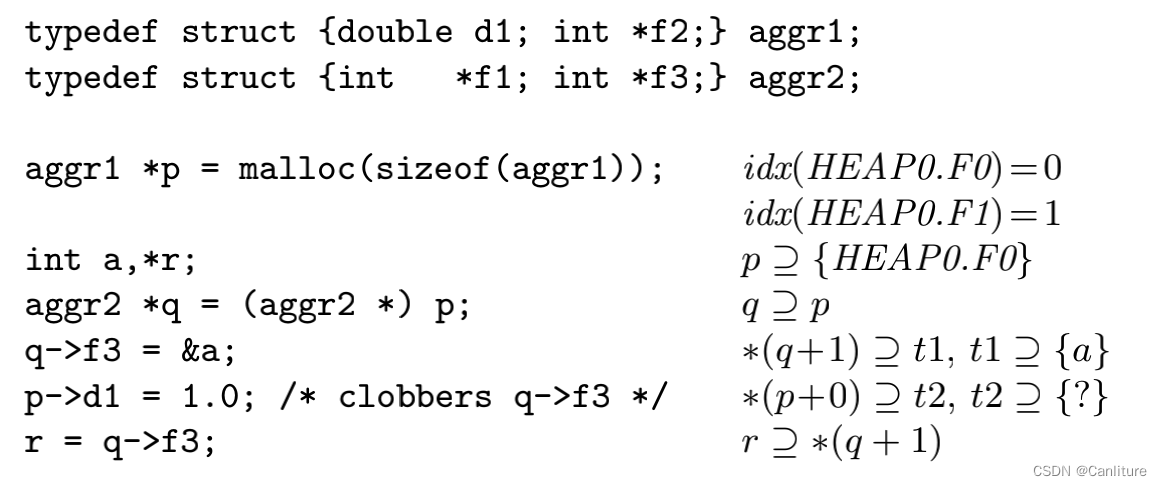
上面提到,对于结构体,就是给结构体里面的字段变量编个号。但是对于堆内存分配,下面给了一个例子:
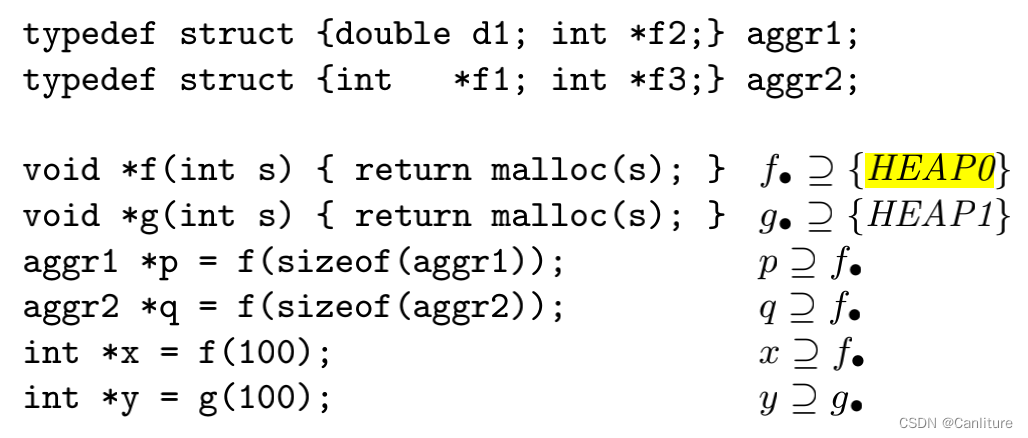
HEAP0既可以表示结构体,又可以表示整数数组。所以上述给字段编号的方法似乎并不适用,因为我们不知道它到底分配出来被用作结构体还是其它类型的数据。
所以我们要么对这种堆,字段不敏感。要么假设它总是结构体。那么问题来了?程序中声明了这么多结构体,堆变量到底是哪个结构体呢?最简单的方法就是:假定堆变量就是程序中最大的那个结构体,每个堆变量就被认为是所有结构体的union。
2.5 处理指针算数和数组
对于指针算数; p = p + 1 p = p + 1 p=p+1 你可能会套用这个约束 p ⊇ p + 1 p \supseteq p + 1 p⊇p+1 ,但实际上,我们只对显式的字段访问建模(x->y, x.y这种)。指针算数我们翻译为 p ⊇ p p \supseteq p p⊇p
对于数组,看成单个约束变量。
3. 算法



![[笔记] - springboot-jpa 使用sqlite 踩坑](https://img-blog.csdnimg.cn/img_convert/08eef9009cc26c1611732509fb6b842f.png)