文档:
https://pymodbus.readthedocs.io/en/latest/
源码:
https://github.com/riptideio/pymodbus/
文章目录
- Python PyModbus库使用教程:以Modbus RTU为例
- 介绍
- 安装PyModbus
- 配置串行连接
- 导入必要的模块
- 创建Modbus客户端实例
- 建立连接
- 连接到Modbus设备
- 读取数据
- 读取寄存器
- 写入数据
- 写入单个寄存器
- 写入多个寄存器
- 处理异常
- 断开连接
- 高级主题
- 异步客户端(使用Twisted或Asyncio框架)
- 自定义消息
- 日志记录
- 实例
- 1. 使用RS485 modbus协议读取温度湿度传感器数据
Python PyModbus库使用教程:以Modbus RTU为例
介绍
Modbus是一种工业领域广泛使用的通信协议,而PyModbus是一个在Python中实现Modbus通信的库。它支持多种Modbus模式,包括RTU(通过串行线路),ASCII和TCP/IP。本教程将重点介绍如何使用PyModbus库进行Modbus RTU通信。
安装PyModbus
在开始编写代码之前,需要确保已经安装了PyModbus库。可以使用pip命令轻松地安装:
pip install pymodbus
配置串行连接
导入必要的模块
首先,需要从pymodbus库中导入必要的模块:
from pymodbus.client.sync import ModbusSerialClient as ModbusClient
不知道是不是改版了,我用上面导入报错,用下面的可以:
from pymodbus.client import ModbusSerialClient as ModbusClient
创建Modbus客户端实例
接下来,创建一个ModbusClient实例,用于建立与Modbus设备的RTU通信:
client = ModbusClient(method='rtu', port='/dev/ttyUSB0', baudrate=9600)
在这里,method参数设置为'rtu'以指定通信协议,port参数根据实际连接的串行端口进行设置(例如Linux系统中可能是'/dev/ttyUSB0',Windows中可能是'COM3'),baudrate参数设置传输速率,这些参数应与设备文档或配置相匹配。
建立连接
连接到Modbus设备
在配置好客户端实例后,尝试连接到Modbus设备:
if client.connect():
print("Modbus RTU Client Connected")
else:
print("Failed to connect to Modbus RTU Client")
读取数据
读取寄存器
Modbus协议定义了几种类型的寄存器,最常见的是保持寄存器和输入寄存器。以下示例展示了如何读取保持寄存器:
response = client.read_holding_registers(address=1, count=10, unit=1)
if not response.isError():
print("Register Values: ", response.registers)
else:
print("Failed to read registers")
在这个例子中,read_holding_registers方法用于读取地址为1的起始位置、数量为10的连续寄存器。unit参数表示从哪个单元(即设备ID)读取数据。
注意:pymodbus某个版本已将unit字段改为slave。使用时即使写错也不会报错,注意查看你的pymodbus文档。
写入数据
写入单个寄存器
要向设备的单个寄存器写入数据,可以使用以下代码:
write_response = client.write_register(address=1, value=25, unit=1)
if not write_response.isError():
print("Written successfully")
else:
print("Failed to write register")
这里使用了write_register方法,它接受地址、要写入的值以及目标设备的单元ID。
写入多个寄存器
如果要写入多个寄存器,可以使用write_registers方法:
values = [20, 40, 60, 80, 100]
write_response = client.write_registers(address=1, values=values, unit=1)
if not write_response.isError():
print("Multiple registers written successfully")
else:
print("Failed to write multiple registers")
这里values列表包含了要写入寄存器的值序列。
处理异常
处理Modbus通信过程中可能出现的异常非常重要,可以使用try-except语句捕获这些异常:
from pymodbus.exceptions import ModbusException
try:
# 尝试执行Modbus操作
response = client.read_holding_registers(address=1, count=10, unit=1)
except ModbusException as ex:
print("An error occurred:", str(ex))
断开连接
在完成所有Modbus通信后,应该关闭与设备的连接:
client.close()
print("Modbus RTU Client Connection Closed")
调用close()方法将关闭串行端口,并释放相关资源。
高级主题
异步客户端(使用Twisted或Asyncio框架)
除了同步客户端,PyModbus还提供了异步客户端选项,可以使用Twisted或Asyncio框架。异步客户端允许程序在等待响应时执行其他任务,对于需要同时处理多个Modbus请求的应用非常有用。
自定义消息
有时候,标准的Modbus函数不足以满足特定的需求。PyModbus允许创建自定义消息和事务处理器,使得可以扩展协议以适应特殊用例。
日志记录
调试和监控Modbus通信过程中,日志记录功能至关重要。PyModbus提供了详细的日志记录机制,可以帮助分析问题所在。
实例
1. 使用RS485 modbus协议读取温度湿度传感器数据
# 请先安装 pymodbus 和 pyserial
# pip install pymodbus
# pip install pyserial
# from pymodbus.client.sync import ModbusSerialClient as ModbusClient # 报错,说找不到 sync
from pymodbus.client import ModbusSerialClient as ModbusClient
from pymodbus.exceptions import ModbusException, ConnectionException
import logging
# 配置日志记录
logging.basicConfig()
log = logging.getLogger()
log.setLevel(logging.DEBUG)
# 初始化Modbus串行客户端
# client = ModbusClient(method='rtu', port='/dev/ttyUSB0', baudrate=9600, timeout=3) # [Errno 2] could not open port /dev/ttyUSB0: [Errno 2] No such file or directory: '/dev/ttyUSB0'
# client = ModbusClient(method='rtu', port='/dev/ttyTHS1', baudrate=9600, timeout=3)
# ttyTHS4 ttyS0 ttyS1 ttyS2 ttyS4
# client = ModbusClient(method='rtu', port='/dev/ttyTHS1', baudrate=9600, timeout=3)
# client = ModbusClient(method='rtu', port='/dev/ttyTHS0', baudrate=9600, timeout=3, stopbits=1, bytesize=8, parity='N')
client = ModbusClient(port='/dev/ttyTHS0', baudrate=9600, timeout=3,
stopbits=1, bytesize=8, parity='N') # 看文档,method='rtu'貌似没用
def read_temperature_and_humidity(client):
try:
# 读取寄存器地址0和1上的4个字节(两个寄存器)
# result = client.read_input_registers(address=0, count=3, unit=1) # 这个错了,这是读取输入寄存器的)0x04
# result = client.read_holding_registers(address=0, count=3, unit=1) # 这个才是读取输入寄存器的0x03 # unit参数错了,当前pymodbus版本没有这个参数,搞乌龙了,要不是用filelocator搜索函数用法,还真不知道- -
result = client.read_holding_registers(
address=0, count=2, slave=1) # 读取输入寄存器的0x03 # 读两个寄存器就ok,卖家说第三个寄存器是预留的,不用读
if result.isError():
# 处理错误
print("读取错误:", result)
return None, None
# 将读取到的结果转换为温度和湿度
registers = result.registers
temperature_reg = registers[0]
humidity_reg = registers[1]
# 检查是否有探头错误
if temperature_reg == 0x8000 or humidity_reg == 0x8000:
print("探头错误")
return None, None
# 计算实际的温度和湿度值
temperature = temperature_reg * 0.1
humidity = humidity_reg * 0.1
# 格式化温度和湿度值,保留一位小数
temperature = round(temperature, 1)
humidity = round(humidity, 1)
return temperature, humidity
except ModbusException as e:
print("Modbus异常:", e)
return None, None
except Exception as e:
# 捕获除ModbusException之外的所有异常
print(f"An error occurred: {e}")
return None, None
def main():
try:
if client.connect(): # 尝试连接到Modbus服务器/设备
temperature, humidity = read_temperature_and_humidity(client)
if temperature is not None and humidity is not None:
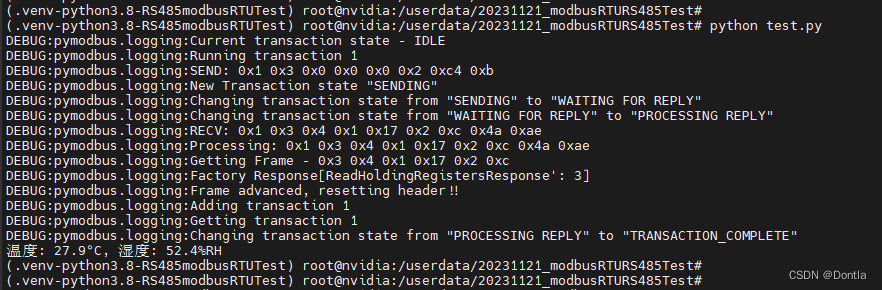
print(f"温度: {temperature}°C, 湿度: {humidity}%RH")
client.close() # 关闭连接
else:
print("无法连接到Modbus设备")
except ConnectionException as e:
print("连接异常:", e)
if __name__ == "__main__":
main()
运行结果:
![[autojs]利用console实现悬浮窗日志输出](https://img-blog.csdnimg.cn/bde5e663485f478b9d9fd14f5618ee62.png)