Hi, 你好。我是茶桁。
前面几节课中,我们从最初的理解神经网络,到讲解函数,多层神经网络,拓朴排序以及自动求导。 可以说,最难的部分已经过去了,这节课到了我们来收尾的阶段,没错,生长了这么久,终于到迎接成果的时候了。
好,让我们开始。
我们还是用上一节课的代码:
21.ipynb。
我们上一节课中,实现了自动计算的部分。
for node in sorted_nodes[::-1]:
print('\n{}'.format(node.name))
node.backward()
结果我就不打印了,节省篇幅。
那我们到这一步之后,咱们就已经获得了偏导,现在要考虑的问题就是去更新它,去优化它的值。
learning_rate = 1e-5
for node in sorted_nodes:
node.value = node.value + -1 * node.gradients[node] * learning_rate
node的值去更新,就应该等于它本身的值加上一个-1乘以它的偏导在乘以一个learning_rate, 我们对这个是不是已经很熟悉了?我们从第8节线性回归的时候就一直在接触这个公式。
只不过在这个地方,x, y的值也要更新吗? 它们的值是不应该去更新的,那要更新的应该是k, b的值。
那么在这个地方该怎么办呢?其实很简单,我们添加一个判断就可以了:
for node in sorted_nodes:
if node.is_trainable:
node.value = node.value + -1 * node.gradients[node] * learning_rate
然后我们给之前定义的类上加一个变量用于判断。
class Node:
def __init__(..., is_trainable=False):
...
self.is_trainable = is_trainable
在这里我们默认是不可以训练的,只有少数的一些是需要训练的。
然后我们在初始化的部分把这个定义的值加上:
node_k = Placeholder(name='k', is_trainable=True)
node_b = Placeholder(name='b', is_trainable=True)
对了,我们还需要将Placeholder做些改变:
class Placeholder(Node):
def __init__(..., is_trainable=False):
Node.__init__(.., is_trainable=is_trainable)
...
...
这就意味着,运行for循环的时候只有k和b的值会更新,我们再加几句话:
for node in sorted_nodes:
if node.is_trainable:
...
cmp = 'large' if node.gradients[node] > 0 else 'small'
print('{}的值{},需要更新。'.format(node.name, cmp))
---
k的值small,需要更新。
b的值small,需要更新。
我们现在将forward, backward和optimize的三个循环封装乘三个方法:
def forward(graph_sorted_nodes):
# Forward
for node in sorted_nodes:
node.forward()
def backward(graph_sorted_nodes):
# Backward
for node in sorted_nodes[::-1]:
print('\n{}'.format(node.name))
node.backward()
def optimize(graph_sorted_nodes, learning_rate=1e-3):
# optimize
for node in sorted_nodes:
if node.is_trainable:
node.value = node.value + -1 * node.gradients[node] * learning_rate
cmp = 'large' if node.gradients[node] > 0 else 'small'
print('{}的值{},需要更新。'.format(node.name, cmp))
然后我们再来定义一个epoch方法,将forward和backward放进去一起执行:
def run_one_epoch(graph_sorted_nodes):
forward(graph_sorted_nodes)
backward(graph_sorted_nodes)
这样,我们完成一次完整的求值-求导-更新,就可以写成这样:
run_one_epoch(sorted_nodes)
optimize(sorted_nodes)
为了更好的观察,我们将所有的print都删掉,然后在backward方法中写一个观察loss的打印函数:
def backward(graph_sorted_nodes):
# Backward
for node in sorted_nodes[::-1]:
if isinstance(node, Loss):
print('loss value: {}'.format(node.value))
node.backward()
然后我们来对刚才完整的过程做个循环:
# 完整的一次求值-求导-更新:
for _ in range(10):
run_one_epoch(sorted_nodes)
optimize(sorted_nodes, learning_rate=1e-1)
---
loss value: 0.12023025149136042
loss value: 0.11090709486917472
loss value: 0.10118818479676453
loss value: 0.09120180962480523
loss value: 0.08111466190584131
loss value: 0.0711246044819575
loss value: 0.061446239826641165
loss value: 0.05229053883349982
loss value: 0.043842158831920566
loss value: 0.036239620745126
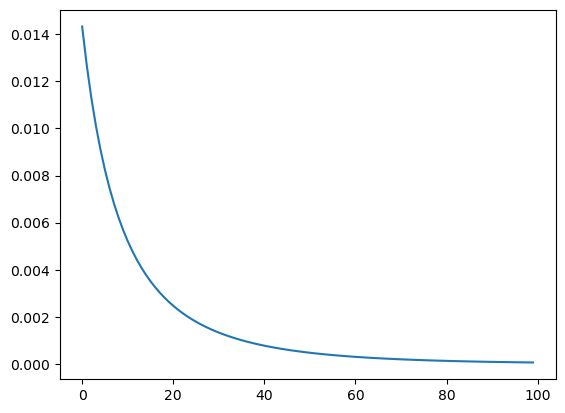
可以看到loss在一点点的下降。当然,这样循环10次我们还能观察出来,但是我们如果要成百上千次的去计算它,这样可就不行了, 那我们需要将history存下来,然后用图来显示出来:
loss_history = []
for _ in range(100):
...
_loss_node = sorted_nodes[-1]
assert isinstance(_loss_node, Loss)
loss_history.append(_loss_node.value)
optimize(sorted_nodes, learning_rate=1e-1)
plt.plot(loss_history)
我们现在可以验证一下,我们拟合的yhat和真实的y之间差距有多大,首先我们当然是要获取到每个值的下标,然后用sigmoid函数来算一下:
sorted_nodes
---
[k, y, x, b, Linear, Sigmoid, Loss]
通过下标来进行计算, k是0, x是2, b是3, y是1:
def sigmoid(x):
return 1/(1+np.exp(-x))
# k*x+b
sigmoid_x = sorted_nodes[0].value * sorted_nodes[2].value + sorted_nodes[3].value
print(sigmoid(sigmoid_x))
# y
print(sorted_nodes[1].value)
---
0.891165479601981
0.8988713384533658
可以看到,非常的接近。那说明我们拟合的情况还是不错的。
好,这里总结一下,就是我们有了拓朴排序,就能向前去计算它的值,通过向前计算的值就可以向后计算它的值。那现在其实我们已经完成了一个mini的深度学习框架的核心内容,咱们能够定义节点,能够前向传播运算,能够反向传播运算,能更新梯度了。
那接下来是不是就结束了呢?很遗憾,并没有,接着咱们还要考虑如何处理多维数据。咱们现在看到的数据都是x、k、b的输入,也就是都是一维的。
然而咱们真实世界中大多数场景下其实都是多维度的,其实都是多维数组。那么多维数组的还需要更新些什么,和现在有什么区别呢?
我们来接着往后看,因为基本上写法和现在这些几乎完全一样,那我也就不这么细致的讲了。
为了和之前代码做一个区分,所以我将多维向量计算的代码从新开了个文件,放在了23.ipynb里,小伙伴可以去下载到本地研习。
那么多维和现在最大的区别在哪里呢?就在于计算的时候,我们就要用到矩阵运算了。只是值变成了矩阵,运算变成的了矩阵运算。好,我们从Node开始来改动它,没什么变化的地方我就直接用...来省略了:
class Node:
def __init__(self, input=[]):
...
def forward(self):
raise NotImplemented
def backward(self):
raise NotImplemented
class Placeholder(Node):
def __init__(self):
Node.__init__(self)
def forward(self, value=None):
...
def backward(self):
self.gradients = {self:0}
for n in self.outputs:
grad_cost = n.gradients[self]
self.gradients[self] = grad_cost * 1
class Linear(Node):
def __init__(self, x, k, b):
...
def forward(self):
...
def backward(self):
self.gradients = {n: np.zeros_like(n.value) for n in self.inputs}
for n in self.outputs:
grad_cost = n.gradients[self]
self.gradients[self.inputs[0]] = np.dot(grad_cost, self.inputs[1].value.T)
self.gradients[self.inputs[1]] = np.dot(self.inputs[0].value.T, grad_cost)
self.gradients[self.inputs[2]] = np.sum(grad_cost, axis=0, keepdims=False)
class Sigmoid(Node):
def __init__(self, node):
Node.__init__(self, [node])
def _sigmoid(self, x):
...
def forward(self):
...
def backward(self):
self.partial = self._sigmoid(self.x) * (1 - self._sigmoid(self.x))
self.gradients = {n: np.zeros_like(n.value) for n in self.inputs}
for n in self.outputs:
grad_cost = n.gradients[self]
self.gradients[self.inputs[0]] = grad_cost * self.partial
class MSE(Node): # 也就是之前的Loss类
def __init__(self, y, a):
Node.__init__(self, [y, a])
def forward(self):
y = self.inputs[0].value.reshape(-1, 1)
a = self.inputs[1].value.reshape(-1, 1)
assert(y.shape == a.shape)
self.m = self.inputs[0].value.shape[0]
self.diff = y - a
self.value = np.mean(self.diff**2)
def backward(self):
self.gradients[self.inputs[0]] = (2 / self.m) * self.diff
self.gradients[self.inputs[1]] = (-2 / self.m) * self.diff
类完成之后,我们还有一些其他的方法:
def forward_and_backward(graph): # run_one_epoch
for n in graph:
n.forward()
for n in graph[::-1]:
n.backward()
def toplogic(graph):
...
def convert_feed_dict_to_graph(feed_dict):
...
# 将sorted_nodes赋值从新定义了一个方法
def topological_sort_feed_dict(feed_dict):
graph = convert_feed_dict_to_graph(feed_dict)
return toplogic(graph)
def optimize(trainables, learning_rate=1e-2):
for node in trainables:
node.value += -1 * learning_rate * node.gradients[node]
这样就完成了。可以发现基本上代码没有什么变动,变化比较大的都是各个类中的backward方法,因为要将其变成使用矩阵运算。
我们来尝试着用一下这个多维算法,我们还是用波士顿房价的那个数据来做一下尝试:
X_ = data['data']
y_ = data['target']
# Normalize data
X_ = (X_ - np.mean(X_, axis=0)) / np.std(X_, axis=0)
n_features = X_.shape[1]
n_hidden = 10
W1_ = np.random.randn(n_features, n_hidden)
b1_ = np.zeros(n_hidden)
W2_ = np.random.randn(n_hidden, 1)
b2_ = np.zeros(1)
# Neural network
X, y = Placeholder(), Placeholder()
W1, b1 = Placeholder(), Placeholder()
W2, b2 = Placeholder(), Placeholder()
l1 = Linear(X, W1, b1)
s1 = Sigmoid(l1)
l2 = Linear(s1, W2, b2)
cost = MSE(y, l2)
feed_dict = {
X: X_,
y: y_,
W1: W1_,
b1: b1_,
W2: W2_,
b2: b2_
}
epochs = 5000
# Total number of examples
m = X_.shape[0]
batch_size = 16
steps_per_epoch = m // batch_size
graph = topological_sort_feed_dict(feed_dict)
trainables = [W1, b1, W2, b2]
print("Total number of examples = {}".format(m))
我们在中间定义了l1, s1, l2, cost, 分别来实例化四个类。然后我们就需要根据数据来进行迭代计算了,定义一个losses来保存历史数据:
losses = []
epochs = 100
for i in range(epochs):
loss = 0
for j in range(steps_per_epoch):
# Step 1
X_batch, y_batch = resample(X_, y_, n_samples=batch_size)
X.value = X_batch
y.value = y_batch
# Step 2
forward_and_backward(graph) # set output node not important.
# Step 3
rate = 1e-2
optimize(trainables, rate)
loss += graph[-1].value
if i % 100 == 0:
print("Epoch: {}, Loss: {:.3f}".format(i+1, loss/steps_per_epoch))
losses.append(loss/steps_per_epoch)
---
Epoch: 1, Loss: 194.170
...
Epoch: 4901, Loss: 3.137
可以看到它loss下降的非常快,还记得咱们刚开始的时候在训练波士顿房价数据的时候,那个loss下降到多少? 最低是不是就下降到在第一节课的时候我们的lose最多下降到了多少47.34对吧?那现在呢?直接下降到了3,这是为什么? 因为我们的维度多了,维度多了它就准确了。这说明什么? 说明大家去谈恋爱的时候,不要盯着对象的一个方面,多方面考察,才能知道这个人是否合适。
好,现在看起来效果是很好,但是我们想知道到底拟合出来的什么函数,那怎么办?咱们把这个维度降低成三维空间就可以看了。
现在咱们这个波士顿的所有数据实际上是一个15维的数据,15维的数据你根本看不了,咱们现在只要把x这个里边取一点值,在这个里边稍微把值给它变一下。
X_ = dataframe[['RM', 'LSTAT']]
y_ = data['target']
在咱们之前的课程中对其进行计算的时候就分析过,RM和LSTAT是影响最大的两个特征,我们还是来用这个。然后我们将刚才的代码从新运行一遍:
losses = []
for i in tqdm_notebook(range(epochs)):
...
---
Epoch: 1, Loss: 150.122
...
Epoch: 4901, Loss: 16.181
这次下降的就没上次好了。
现在我们可视化一下这个三维空间来看看:
from mpl_toolkits.mplot3d import Axes3D
predicate_results = []
for rm, ls in X_.values:
X.value = np.array([[rm, ls]])
forward_and_backward(graph)
predicate_results.append(graph[-2].value[0][0])
%matplotlib widget
fig = plt.figure(figsize=(10, 10))
ax = fig.add_subplot(111, projection='3d')
X_ = dataframe[['RM', 'LSTAT']].values[:, 0]
Y_ = dataframe[['RM', 'LSTAT']].values[:, 1]
Z = predicate_results
rm_and_lstp_price = ax.plot_trisurf(X_, Y_, Z, color='green')
ax.set_xlabel('RM')
ax.set_ylabel('% of lower state')
ax.set_zlabel('Predicated-Price')
然后我们就能看到一个数据的三维图形,因为我们开启了widget, 所以可以进行拖动。
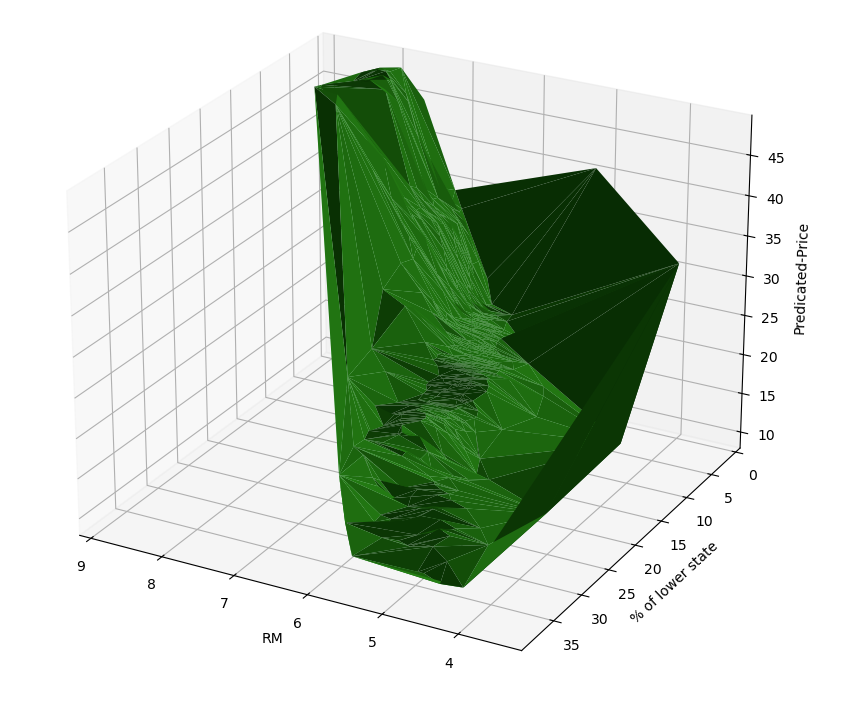

从图形上看,确实符合房间越多,低收入人群越少,房价越高的特性。
那现在计算机确实帮我们自动的去找到了一个函数,这个函数到底怎么设置咱们都不用关心,它自动就给你求解出来,这个就是深度学习的意义。咱们经过这一系列写出来的东西其实就已经能够做到。
我觉得这个真的有一种数学之美,它从最简单的东西出发,最后做成了这样一个复杂的东西。确实很深其,并且还都在我们的掌握之中。
好,大家下来以后记得要多多自己敲代码,多分析其中的一些过程和原理。