不小心又绕进去了,所以掰一下。
以我个人最直观的理解,假设无旋转,相机在世界坐标系的(5,0,0)^T的位置上,所谓“位姿”,应该反映相机的位置,所以相机位姿应该如下:
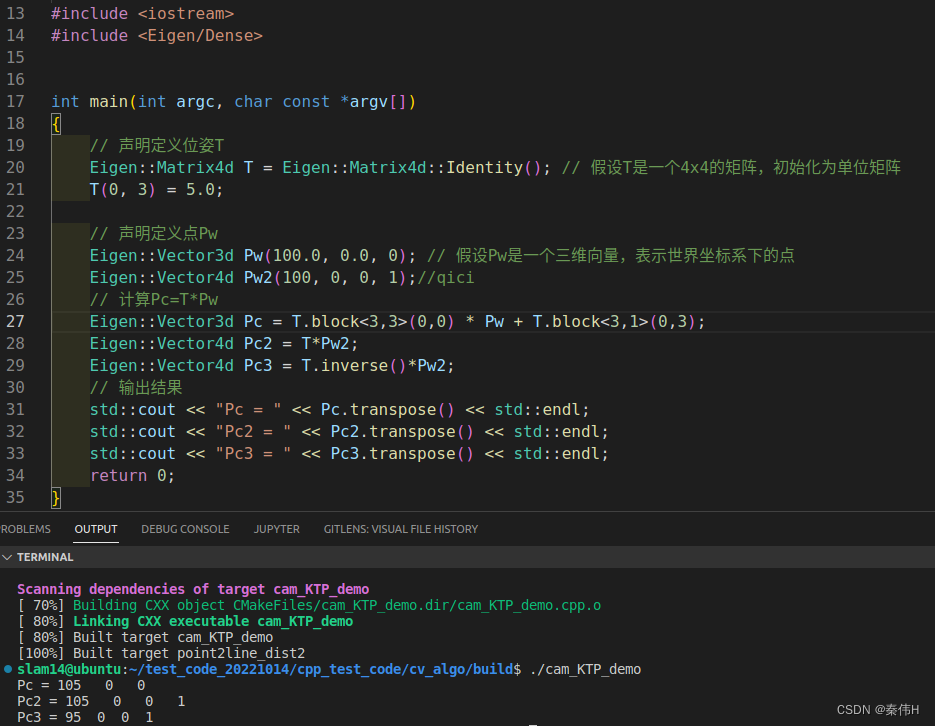
Eigen::Matrix4d T = Eigen::Matrix4d::Identity(); // 假设T是一个4x4的矩阵,初始化为单位矩阵
T(0, 3) = 5.0;但是根据我对位姿的这个理解,再结合高翔博士的《十四讲》第五章,第二版P99,世界坐标系的点变换到相机坐标系,是直接“左乘”“相机位姿”,Pc=T*Pw,那么这就出现了一些小问题
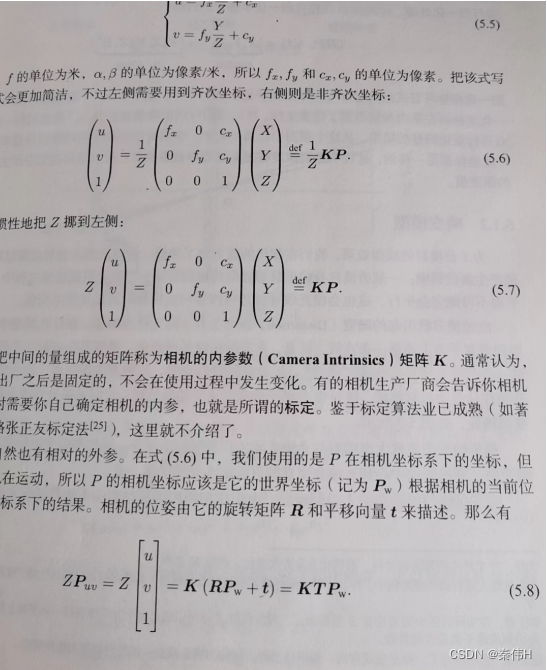
问题点:相机坐标是(5,0,0)^T,世界坐标点位置是(100,0,0)^T,相机坐标系下,这个点肯定是100-5,是(95,0,0)^T,但是又因为相机“位姿”是(5,0,0)^T,直接左乘相机“位姿”就得到了第一个结果"Pc=105 0 0",这明显和预期不一样,按照这种T的声明与定义,需要左乘T的逆才能得到预期的结果“Pc3 = 95 0 0 1”(齐次)
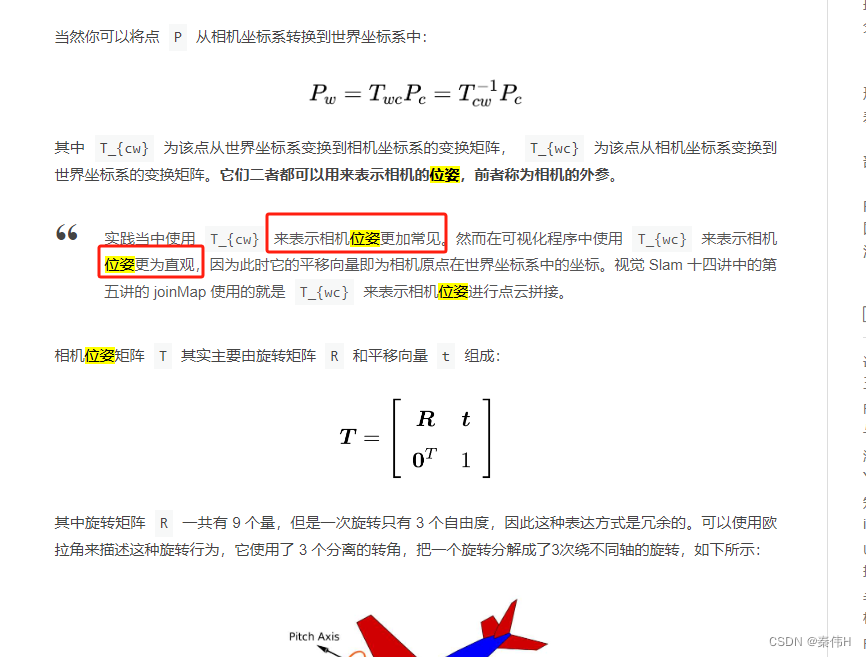
所以高翔博士提到的位姿是可以直接左乘的,和我认为的位姿是逆的关系。
根据习惯定义,想把Pw转换为Pc,应该是Pc=Tcw*Pw,高翔博士称为位姿的是Tcw。
根据主观习惯,相机在世界坐标系的位姿应该是Twc。想获得Pc应该是Pc=Twc^(-1)*Pw。
所以,我们产生了两种位姿描述。哪一种是正确的呢?很遗憾,我目前没有答案,网上搜到的一些关于位姿的解释则更加“和稀泥”,Tcw和Twc两种都可以叫位姿。根据有限的学识,我只能说我们清楚什么变换能干什么,能通过调整用法获得自己想要的结果就好,个别说法不能较真。


![[C/C++] 数据结构 链表OJ题:相交链表(寻找两个链表的相交起始结点)](https://img-blog.csdnimg.cn/337b507a20c84817810261053a28e610.jpeg)