这章讲述模型框架和概念的时间较多,好像并没有涉及过多的运算,重在一些概念的理解。
Traditional Autoencoder
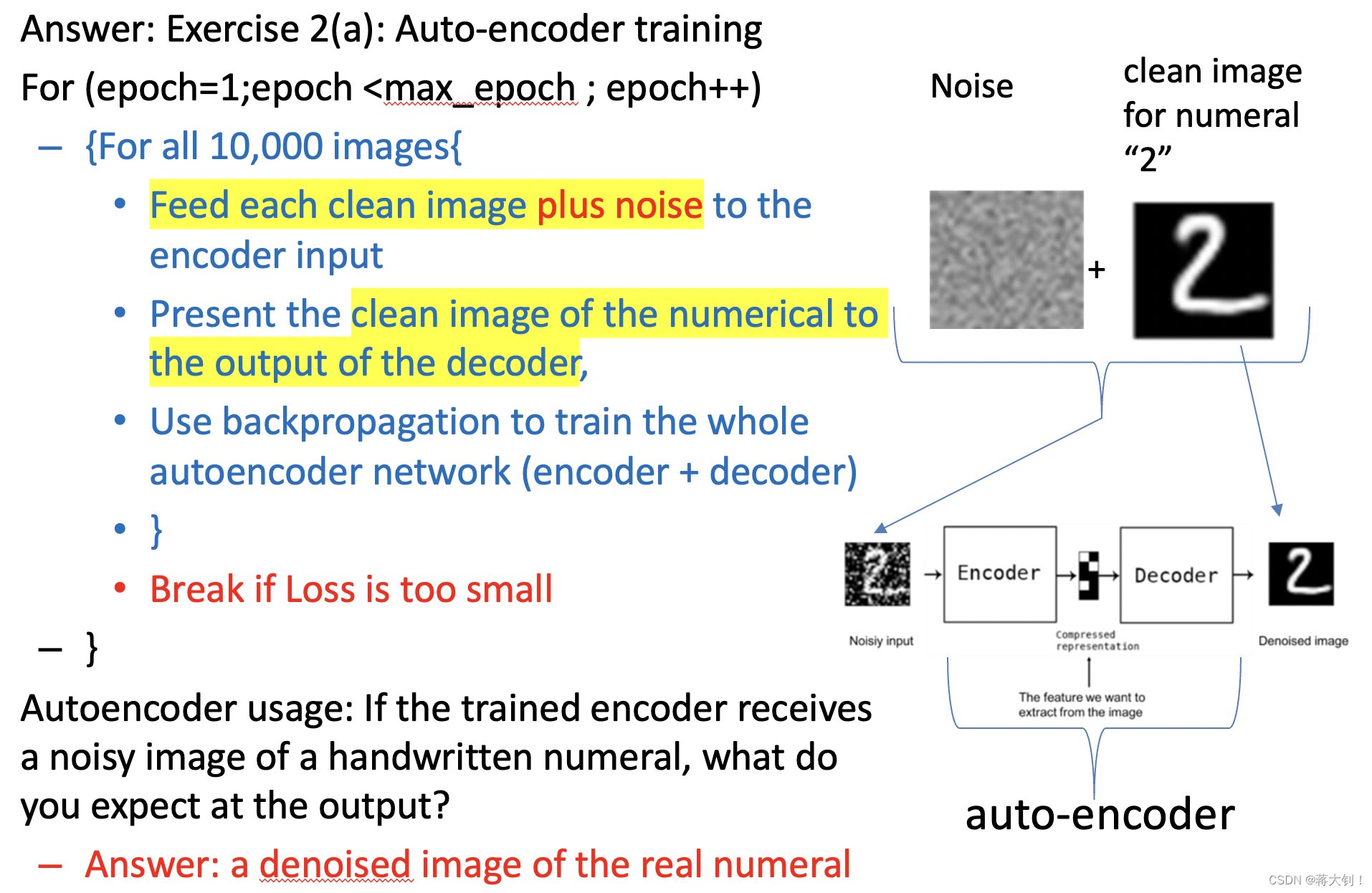
传统的自编码器常用来进行图像去噪的任务,需要了解其模型架构和流程。
自编码器由两部分组成:从Noisy Input到Z称为编码器,从Z到De-noised Output称为解码器。Input和Output有着相同的维度。

自编码器的最终目的是让X的重建误差最小,这样子能保证输入和输出尽可能地相似。

Auto-encoder的训练是一个无监督学习的过程,因为并不需要标记的数据训练。流程如下所示,它将纯净的图像+噪声整体放入encoder input,同时将纯净的图像放入decoder output,将forward processing得出的图像与纯净图像算出误差进行backpropagation训练。
Variational Autoencoder
Variational Autoencoder会从输入的图像中学习概率分布的参数,然后通过这些参数来产生新的图像。通过输入的图像X学到概率分布的变量
μ
\mu
μ和
σ
\sigma
σ,潜在参数
Z
Z
Z的Sample从该概率分布中随机取样得到,接着放入Decoder进行重建。

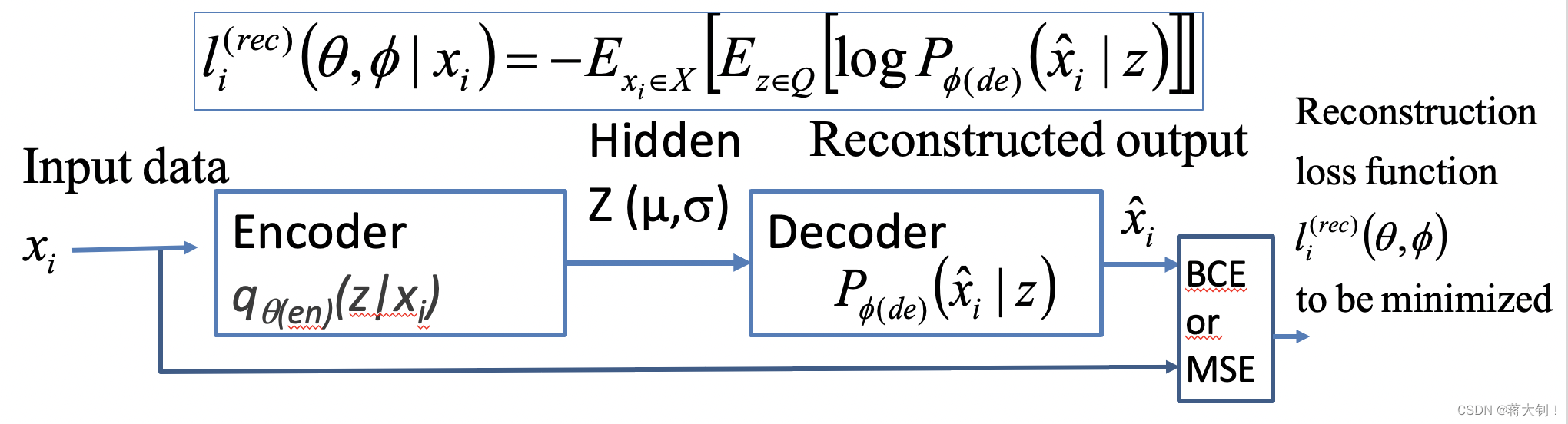
其训练过程同Auto-encoder一致,在去噪任务中,将噪声图像放入input,纯净图像放入output,通过反向传播进行训练,其中的关键在于反向传播过程中损失Loss的定义,损失的定义中有两项。
先对相关参数进行定义,
q
θ
(
e
n
)
(
z
∣
x
i
)
q_{\theta(en)}(z|x_i)
qθ(en)(z∣xi) 表示接受输入数据
x
i
x_i
xi,返回潜在变量
Z
Z
Z(
Z
Z
Z是由
μ
\mu
μ和
σ
\sigma
σ随机产生的),可以从
Z
Z
Z中进行Sampling,
θ
(
e
n
)
\theta(en)
θ(en)代表encoder的weights和bias。
P ϕ ( d e ) ( x ^ i ∣ z ) P_{\phi(de)}(\hat x_i |z) Pϕ(de)(x^i∣z)接受潜在变量 Z Z Z产生的Sample,得到输出为 X ^ \hat{X} X^, ϕ ( d e ) \phi(de) ϕ(de)代表decoder的weights和bias。
重建的损失 l i ( θ , ϕ ) = − E x i ∈ X [ E z ∈ Q [ l o g P ϕ ( d e ) ( x ^ i ∣ z ) ] ] l_i(\theta,\phi)=-E_{x_i \in X} \big[E_{z \in Q}[log P_{\phi (de)}(\hat x_i | z)]\big] li(θ,ϕ)=−Exi∈X[Ez∈Q[logPϕ(de)(x^i∣z)]]需要尽可能地小。由于 P P P为高斯分布,因此可以对上式重写为= 1 N ∑ x i ∈ X ( 1 2 σ x i ^ ∣ z 2 ( x i − μ x i ^ ∣ z ) 2 ) \frac{1}{N}\sum\limits_{x_i \in X}\Big( \frac{1}{2 \sigma^2_{\hat {x_i}|z}}(x_i - \mu_{\hat{x_i}|z})^2\Big) N1xi∈X∑(2σxi^∣z21(xi−μxi^∣z)2).
Kullback–Leibler divergence
但是会存在的问题是,同样 l i ( θ , ϕ ) l_i(\theta,\phi) li(θ,ϕ)较小, q θ ( e n ) ( z ∣ x i ) q_{\theta(en)}(z|x_i) qθ(en)(z∣xi)和 P ϕ ( d e ) ( x ^ i ∣ z ) P_{\phi(de)}(\hat x_i |z) Pϕ(de)(x^i∣z)的差异很大,显然不是来自相同的分布。因此这里引入了Kullback–Leibler divergence 来衡量两个分布的差异程度, D K L [ q θ ( e n ) ( z ∣ x i ) ∣ ∣ ( N ( 0 , I ) ] D_{KL}\big[ q_{\theta(en)(z|x_i)} || ( N(0,I)\big] DKL[qθ(en)(z∣xi)∣∣(N(0,I)]衡量了差生图像分布与标准高斯分布的差异。
最终该模型的Loss定义为
L
(
a
l
l
)
=
1
N
∑
x
i
∈
X
(
1
2
σ
x
i
^
∣
z
2
(
x
i
−
μ
x
i
^
∣
z
)
2
)
+
D
K
L
[
q
θ
(
e
n
)
(
z
∣
x
i
)
∣
∣
(
N
(
0
,
I
)
]
L^{(all)}=\frac{1}{N}\sum\limits_{x_i \in X}\Big( \frac{1}{2 \sigma^2_{\hat {x_i}|z}}(x_i - \mu_{\hat{x_i}|z})^2\Big)+D_{KL}\big[ q_{\theta(en)(z|x_i)} || ( N(0,I)\big]
L(all)=N1xi∈X∑(2σxi^∣z21(xi−μxi^∣z)2)+DKL[qθ(en)(z∣xi)∣∣(N(0,I)],其物理意义为在局部的概率分布中,产生与输入误差最小的输出。

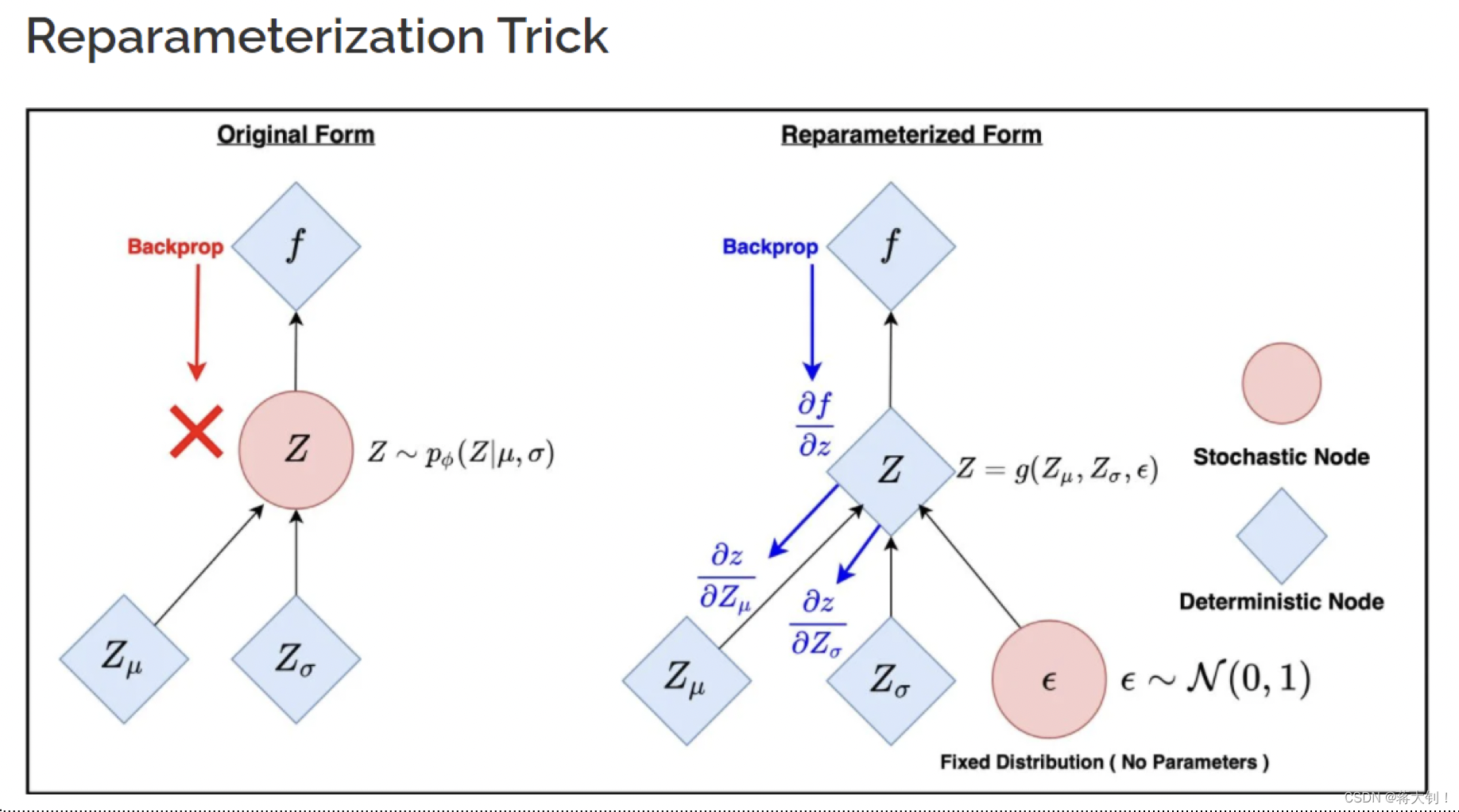
Reparameterization
在模型构建的过程中,潜在变量
Z
Z
Z在
μ
\mu
μ和
σ
\sigma
σ固定的情况下涉及了random选择sample的过程,不能通过backpropagate进行训练,因此引入了reparameterization trick. 其将原先平均值为
μ
\mu
μ,标准差为
σ
\sigma
σ的高斯分布,表示为
Z
=
ϵ
⋅
σ
x
+
μ
x
Z= \epsilon\cdot\sigma_x +\mu_x
Z=ϵ⋅σx+μx,其中
ϵ
∈
N
(
0
,
1
)
\epsilon \in N(0,1)
ϵ∈N(0,1),这样子任意的
Z
Z
Z都可以通过对
N
(
0
,
1
)
N(0,1)
N(0,1)的缩放表示出来。

该方法让原先随机化的过程确定化,从而能够进行backpropagation.