(1)unity模拟器
通过viple程序,将viple编写逻辑运行在unity模拟器中。
首先编写viple程序,逻辑:设置一个机器人主机,并且,按↑、↓、←、→方向键的时候,能分别控制模拟机器人在unity模拟器中运行。
主机:

逻辑实现:

运行:
首先点击“运行”,选择“启动unity模拟器”,弹出的窗口中,设置启动的端口号为1350(原因:上面设置的主机的端口号是1350,所以该处只能填写为1350)。


运行成功后,可以看到如下界面:
此时,点击↑、↓、←、→方向键时,没有任何反映。
需要将viple程序启动

注意:该界面不要关闭,保持运行。再切换到unity模拟器,点击↑、↓、←、→方向键时,机器人有前进、后退、左转、右转的行为。

当然,如果用户想要随时停下机器人,可以再增加一个space按键事件,点击后,将机器人移动动力控制活动的驱动功率值设置为0,从而来模拟按空格键实现模拟暂停行为。

(1)web2D模拟器
想要通过方向键控制机器人在Web 2D模拟器中运行
主机:端口号必须设置为8124、连接类型设置为WebSocket Server

逻辑:

除了主机外,设置的参数和上面unity模拟器的是一致的。
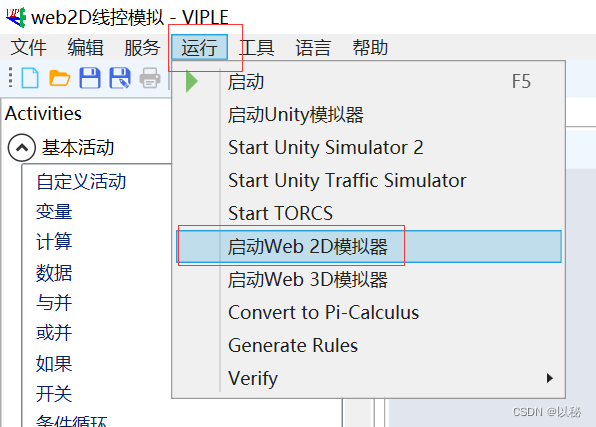
点击“运行”,选择“启动Web 2D模拟器”
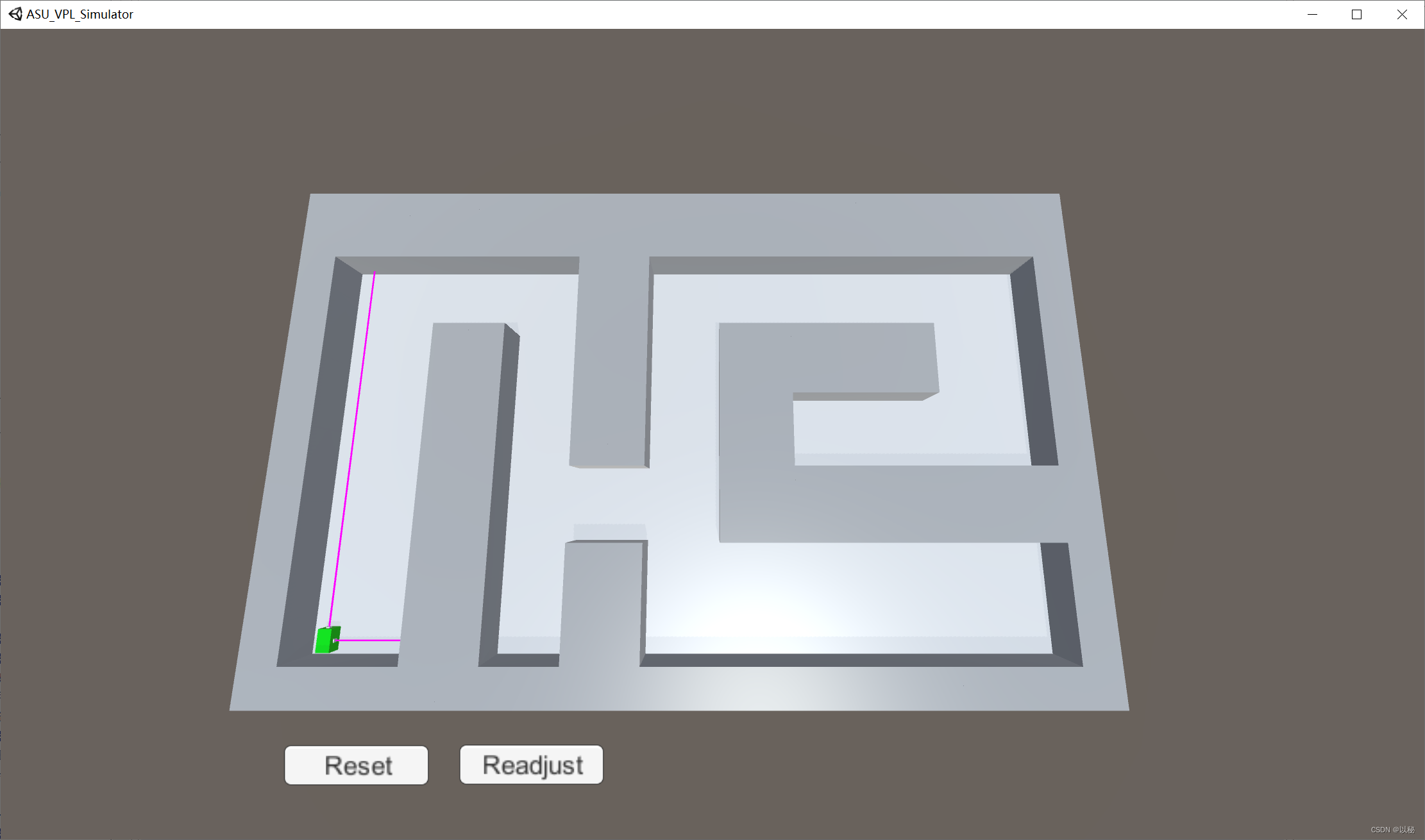
运行成功后,打开了浏览器,并显示如下界面:

点击方向键即可使得模拟器中的机器人按照指定方向运行。
如果此时运行viple程序,并点击连接到Connect to ASU VIPLE(Websockets),则会弹出已连接到viple。
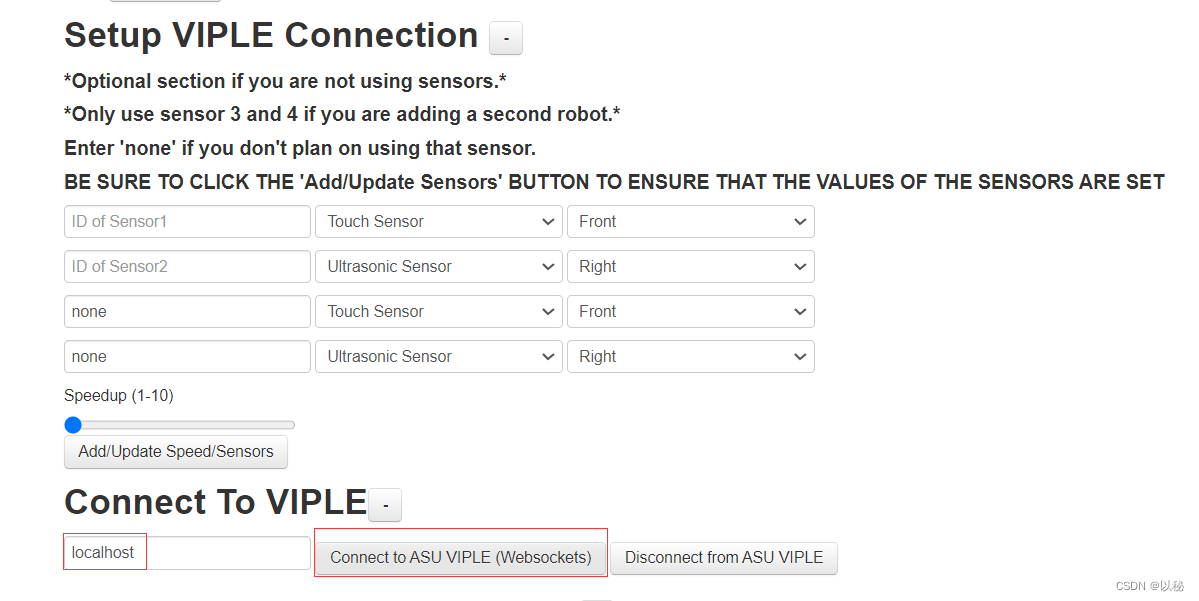

如果有viple程序较为复杂,使用到了传感器,则需要在Setup VIPLEConnection中设置每个传感器对应的端口号(如果不记得了,可以去viple程序中,选中传感器,看看右侧的Activity Settings),并且要点击“Add/Update Speed/Sensors”。然后再通过ip地址来连接到viple。