文章目录
- 地图数据规范
- 地图图层和表达要求
- 地图各类数据属性要求
- SLAM地图要求
- 坐标系
- 数据采集车
- 传感器数据采集
- 数据流程
- 感知功能要求
- 车端感知功能
- 关键安全感知
- 次要安全感知
- 功能感知
- 体验相关感知
- 车-场协同感知
- 类型一:引导
- 类型二:重点地段增强
- 类型三:全场感知
- V2X
- AVP 感知位置精度要求
地图数据规范
AVP地图采用相对坐标系,精度误差<20cm/100m。经纬度、高程单位均以m为单位,坐标值精确至0.001m。
地图图层和表达要求
&ermsp;典型地图图层包括规划数据、动态数据、定位数据等。其表达要求如表所示。
| 地图图层、要素、几何等表达要求 | ||||
|---|---|---|---|---|
| 数据层 | 名称 | 类型 | 说明 | 备注 |
| 规划数据 | parkinglot | 面 | 停车场 | - |
| road | 线 | 道路 | - | |
| lane | 线 | 车道(中心线及属性) | 几何以车道中心线 | |
| signline_vertical | 线 | 纵向标线 | - | |
| signline_horizontal | 线 | 横向标线 | - | |
| intersection | 面 | 路口及道路连接性信息 | - | |
| parking_lot | 多线 | 停车位 | 停车位型点为多线表达方式,第一条线表达停车位轮廓,坐标次序采用逆时针表达,第一 个点和最后一个点之间的开口靠近道路;第二条线表达停车桩信息。 | |
| signpolygon | 面 | 面状标识 | - | |
| zone | 面 | 区域信息,如停车场等 | - | |
| road_appendix | 点 | 道路附属物 | - | |
| point | 点 | 关键点 | - | |
| 动态数据 | traffic | - | 影响车辆规划定位重要元素的信息更新 | - |
| 定位数据 | landmark | 面 | 用于辅助定位的关键landmark 信息 | - |
| SLAM | 二进制 | SLAM地位地图 | - | |
地图各类数据属性要求
| 停车场表达要求 | ||||
|---|---|---|---|---|
| 序号 | 属性 | 类型 | 说明 | 备注 |
| 1 | ID | int | 编号 | 保证每个建筑的唯一性 |
| 2 | name | string | 名称 | 例如:上海虹桥站P9 停车场 |
| 3 | address | string | 地址 | 例如:上海闵行区华漕镇申虹路 |
| 4 | num | int | 停车位数量 | - |
| 5 | building_layer_num | int | 停车场楼层数 | - |
| 6 | type | string | 停车场类型 | 停车场分级对应: P0 P1 P2 P3 P4 P5 |
| 道路表达要求 | ||||
|---|---|---|---|---|
| 序号 | 属性 | 类型 | 说明 | 备注 |
| 1 | ID | int | - | - |
| 2 | name | string | 名称 | - |
| 3 | is_dual | int | 0 ~ 单向通行 1 ~ 双向通行 2 ~ 双向禁行 | - |
| 4 | level | int | 道路等级 | 0~未知 1~主要道路 2~次要道路 3~一般道路 4~出入目的地道路 5~细道路 6~步行道路 |
| 5 | rt | int | 道路类型 | 0~未知 1~双线化道路 2~单线化道路 3~辅路 4~环岛 5~交通广场 6~封闭交通区域 7~点头专用道 8~左转专用道 9~右转专用道 10~停车场出入通道 11~停车场内部道路 12~停车场楼层间通道 |
| 6 | forward_lane_num | int | 正向车道数量 | 与道路矢量方向一致为正向 |
| 7 | reverse_lane_num | int | 反向车道数量 | 与道路矢量方向相反为反向 |
| 8 | left_border_id | int | 道路左侧边缘ID | 以道路矢量方向为基准判断左右 |
| 9 | right_border_id | int | 道路右侧边缘ID | 以道路矢量方向为基准判断左右 |
| 10 | from | string | 前序关联道路 | - |
| 11 | to | string | 后序关联道路 | - |
| 12 | res_time | string | 道路限制时间作用域 | 采用GDF时间域格式 |
| 13 | res_vehicle | string | 道路限制车型 1~全部车辆 2~小轿车 3~微型车 4~小型卡/货车 5~大卡/货车 6~拖挂车 7~小型客车 8~大型客车 9~公交车 10~出租车 11~自行车/人力车 12~摩托车 13~行人 | - |
| 14 | res_height | double | 限高 | - |
| 15 | res_width | double | 限宽 | - |
| 16 | z_level | int | 高程层级信息: 9999:无效值/未知 -100~100:层数 | 不同层之间过渡道路层级为无效值; 直接相连接道路层级排除无效层级道路后,所有道路层级需相同 |
| 车道表达要求 | ||||
|---|---|---|---|---|
| 序号 | 属性 | 类型 | 说明 | 备注 |
| 1 | id | int | - | - |
| 2 | lane_type | int | 车道类型: 0~未知 1~一般车道 2~公交港湾车道 3~公交车道 4~路口内虚拟车道 5~左转待转车道 6~直行待行车道 | - |
| 3 | is_dual | int | 0~单向 1~双向 | - |
| 4 | direction | int | 0~未知 1~直行 2~左转 3~右转 4~左调头 5~右调头 6~直行+右转 7~直行+左转 8~右转+调头 9~左转+调头 | - |
| 5 | seg_id | int | 所在road的ID | - |
| 6 | lane_width | double | 车道宽度 | - |
| 7 | max_vel | double | 限速 | - |
| 8 | left_line_id | int | 左车道线ID | 无车道线时,为边线ID |
| 9 | right_line_id | int | 右车道线ID | 无车道线时,为边线ID |
| 10 | left_line_type | int | 左侧车道线类型 | 非必需属性: 1~道路边界 2~虚线 3~实线 4~双虚线 5~双实线 6~左实右虚线 7~左虚右实线 8~断开 |
| 11 | right_line_type | int | 右侧车道线类型 | 非必需属性: 1~道路边界 2~虚线 3~实线 4~双虚线 5~双实线 6~左实右虚线 7~左虚右实线 8~断开 |
| 12 | res_time | string | 车道限制时间作用域 | 采用GDF时间域格式 如公交车道限时信息 |
| 13 | res_vehicle | string | 车道限制车型 1~全部车辆 2~小轿车 3~微型车 4~小型卡/货车 5~大卡/货车 6~拖挂车 7~小型客车 8~大型客车 9~公交车 10~出租车 11~自行车/人力车 12~摩托车 13~行人 | - |
| 纵向标线达要求 | ||||
|---|---|---|---|---|
| 序号 | 属性 | 类型 | 说明 | 备注 |
| 1 | id | int | - | - |
| 2 | line_type | int | 1~车道线 2~道路边界 3 自设定道路边界(无边界道路,则人为设置通行方向两侧边界) 4~其他 5~路面标记 | - |
| 3 | seg_id | int | 纵向标线所属道路 | - |
| 4 | shape | int | 1~道路边界 2~虚线 3~实线 4~双虚线 5~双实线 6~左实右虚线 7~左虚右实线 8~断开 | 8:断开,当实际场景中该段无实际车道线时,为地图完整表达和自动驾驶应用加出来的虚拟标线 |
| 5 | color | int | 0~未定义 1~白色 2~黄色 3~橙色 4~蓝色 | - |
| 6 | material | int | 0~未定义 1~标线 2~实体突出 3~边沿 4~墙壁 5~护栏 | - |
| 横向标线达要求 | ||||
|---|---|---|---|---|
| 序号 | 属性 | 类型 | 说明 | 备注 |
| 1 | id | int | - | - |
| 2 | line_type | int | 0~未知 1~停止线 2~减速带 3~双虚线 | - |
| 3 | color | int | 0~未定义 1~白色 2~黄色 3~橙色 4~蓝色 | - |
| 4 | seg_id | int | 道路ID | - |
| 路口表达要求 | ||||
|---|---|---|---|---|
| 序号 | 属性 | 类型 | 说明 | 备注 |
| 1 | id | int | - | - |
| 2 | inroads | list | 驶入道路列表 | - |
| 3 | outroads | list | 驶出道路列表 | - |
| 4 | interlanes | list | 路口内车道列表 | - |
| 停车位表达要求 | ||||
|---|---|---|---|---|
| 序号 | 属性 | 类型 | 说明 | 备注 |
| 1 | id | int | - | - |
| 2 | name | string | 名字 | - |
| 4 | p_type | int | 0~未知 1~标准车位 2~残疾人车位 3~微型车位 4~母子车位 5~充电停车位 6~立体车位 7~女士车位 8~加长车位 9~私有车位 | - |
| 5 | sign | string | 停车位标记 | 例如B101 |
| 6 | seg_id | int | 关联道路ID | - |
| 7 | parking_space_theta | double | 车位形状角度 | 竖直、侧方、斜入 |
| 8 | parking_lock | int | 0~无地锁 1~有地锁 | - |
| 9 | border_color | int | 0~未定义 1~白色 2~黄色 3~橙色 4~蓝色 | - |
| 10 | background_color | int | 0~未定义 1~白色 2~黄色 3~橙色 4~蓝色 | - |
| 11 | z_level | string | 停车场楼层信息 | 可为数字或非数字楼层表达 对于非多层停车场,该字段为空 |
| 面状标识表达要求 | ||||
|---|---|---|---|---|
| 序号 | 属性 | 类型 | 说明 | 备注 |
| 1 | id | int | - | - |
| 2 | type | int | 0~未知 1~人行横道 2~禁停区域 3~导流线 4~导向箭头 5~文字 6~停靠站 7~收费岛 | - |
| 3 | seg_id | int | 道路ID | - |
| 4 | lanes | list | 影响车道ID列表 | - |
| 5 | color | int | 0~未定义 1~白色 2~黄色 3~橙色 4~蓝色 | - |
| 运营区域表达要求 | ||||
|---|---|---|---|---|
| 序号 | 属性 | 类型 | 说明 | 备注 |
| 1 | id | int | - | - |
| 2 | name | string | - | - |
| 3 | type | int | 0~未知 1~停车场 2~停车区域 3~电子围栏 4~卸货区 5~其他区域 | - |
| 4 | z_level | int | 相对高程-10~10 | 根据类型不同表达不同含义,比如楼层 |
| 道路附属物表达要求 | ||||
|---|---|---|---|---|
| 序号 | 属性 | 类型 | 说明 | 备注 |
| 1 | id | int | - | - |
| 2 | name | string | 名称 | - |
| 3 | type | int | 0~未知 1~路牌 2~信号灯 3~路灯 4~停止标志 5~杆状物 | - |
| 4 | seg_id | int | 道路ID | - |
| 5 | subtype | int | 路牌: 1~禁停 2~限速 3~限高 4~限宽等 | 杆状物:1~停车场出入口停车杆 |
| 6 | lanes | list | 影响车道ID列表 | - |
| 7 | shape | string | 形状 | 方形/矩形 等边三角形 圆形 菱形 倒等边三角形 条形 不规则形状 |
| 关键点表达要求 | ||||
|---|---|---|---|---|
| 序号 | 属性 | 类型 | 说明 | 备注 |
| 1 | id | int | - | - |
| 2 | name | string | 名称 | - |
| 3 | geotype | string | 元素种类 | - |
| 4 | type | int | 站点 泊车点 卸货点 途径点 电梯口 商场入口 楼梯入口 停车场出入口 | - |
| 动态交通表达要求 | ||||
|---|---|---|---|---|
| 序号 | 属性 | 类型 | 说明 | 备注 |
| 1 | id | int | - | - |
| .2 | item_type | int | 道路 车道 停车位 道路附属物 关键点 定位标志 | - |
| 3 | item_id | int | 地图元素的ID | - |
| 4 | traffic_type | int | 0~Not_Available 1~Close 2~Slow | |
| 定位标志表达要求 | ||||
|---|---|---|---|---|
| 序号 | 属性 | 类型 | 说明 | 备注 |
| 1 | id | int | - | - |
| 2 | type | int | 0~未知 1~防撞条 2~箭头指向标志 3~出入口标志 4~区域标志 5~国际ISO 标志 6~中国 ISO 标志 | |
| 3 | border_color | int | 0~未定义 1~白色 2~黄色 3~橙色 4~蓝色 | - |
| 4 | background_color | int | 0~未定义 1~白色 2~黄色 3~橙色 4~蓝色 | - |
| 5 | content | string | 内容 | - |
| 6 | pic_id | int | 图片ID | - |
SLAM地图要求
坐标系
采用相对坐标系,精度误差小于20cm/100m。坐标中x、y、z均以m为单位,精确至0.001m。
数据采集车
1. 激光发生器不低于16 线,平视,采集车顶不高于190cm,车身少遮挡,传感器时间戳准确(毫秒级);
2. 环视摄像头安装位置应监测到车身前提下的最大视角、时间戳精确毫秒级(建议硬件同步)、正常环视安装高度;
3. 惯导应提供内外参、精确位姿或原始数据;
4. 采集车速应控制在5~10km/h,对应自动驾驶车辆传感器安装需求:环视安装高度(正常环视
安装高度)。
传感器数据采集
1. 激光雷达应提供单帧、连续化点云、10~20 帧/秒、对应时间戳;
2. 环视应提供彩色、分开4 张单张、20~30 帧/秒、对应时间戳;
3. GPS: 10 帧~20 帧/秒, 无GPS 信号区域提供轨迹信息作为参考
4. IMU: 100~200 帧/秒;
5. 授时:GPS 授时;
6. 准确内外参;
7. 相机内参:摄像头焦距,球心中心点,畸变-统一的标定方式。
数据流程
1. 数据使用: 可以以本地数据或者服务器形式提供地图访问,定位地图需要以物理格式方式提
供;
2. 数据采集频率要求:综合考虑动态交通、季节、光线等环境因素。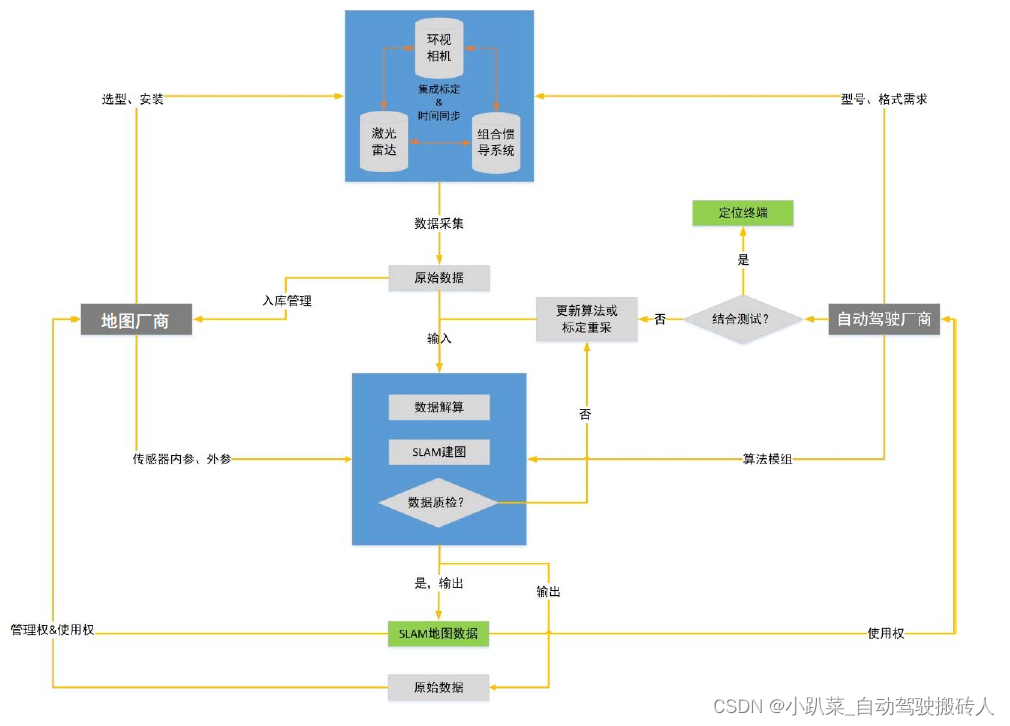
感知功能要求
车端感知系统感知范围主要在车端传感器视野范围内,目的主要包括以下三个方面:
1. 安全性:实时、准确识别周边影响行车安全的行人、动物以及物体,应对突发事件,提前预知安全因素以采取必要操作,避免发生交通安全事故;
2. 功能性:基于车辆行驶性能、周边路况和通行规则,能够实时、准确识别AVP 功能相关的信息,保证准确、安全地完成AVP 泊车功能。
3. 体验舒适性:为车辆高效、平顺行驶提供参考依据。
由于感知范围更大,可以对同一位置进行持续感知检测等特点,车-场协同以及V2X除需覆盖车端感知系统感知范围外,还可以对停车场运营维护、路网引导等进行提供支持。由于不同的感知检测对自动驾驶系统的影响不同,车端感知功能将从四个方面提出相应要求,包括:
1. 关键安全感知, 指对自动驾驶具有关键性安全影响的感知内容,当感知失效时容易引起严重事故;
2. 次要安全感知,指不易引起严重事故,但感知失效时会引发次生安全问题的感知内容;
3. 功能感知,指与AVP 功能定义相关的感知内容,当感知失效时可能导致AVP 功能失效;
4. 体验相关感知,指和AVP 体验舒适度相关的感知内容。
针对车-场协同以及V2X场景,则添加停车场运维维护和路网引导两方面的功能要求。感知功能要求为实现AVP功能的最低标准要求,AVP停车场环境在标准定义环境范围内发生变化时,如天气、光线、季节发生变化,感知功能要求保持一致。
车端感知功能
关键安全感知
感知内容:
1) 行人、车辆、小动物、自动车骑行者、电动车骑行者;
2) 运动速度估计:速度估计误差应低于2km/h。
识别率,目标出现(目标可视度大于50%)300ms 内未识别到视为识别失败 :
1) 车辆15m 距离范围内,识别率应达到99.99%;
2) 车辆15m 至30m 距离范围内,识别率应达到99%。
实时性:识别频率达到10Hz 及以上;
识别距离:非自车运动物体速度在15 km/h 以下,识别距离30m。
次要安全感知
感知内容:
1) 未知障碍物:高度达到20cm 以上,没有被具体分类的静态物体的统称;
2) 施工标志:停车场内由于施工临时设置的施工标志,包括施工围栏和锥桶;
3) 路肩:具有一定高度的路沿;
4) 隔离栏:为规范道路行驶设置的路侧以及路中的隔离栏;
5) 会导致安全问题的漏检,如停车桩、车位锁、闸机等。
识别率:99.9%;
实时性:识别频率达到10Hz 及以上;
识别距离:30m。
功能感知
感知内容:可行驶区域、车道线、停车位、停车桩、车位锁、闸机、停车位内草丛;
功能可用性:99.99%;
实时性:识别频率达到10Hz 及以上;
识别距离:20m。
体验相关感知
感知内容:当路侧的树木枝叶,草丛局部进入行驶区域时,需正确识别以决定正常行驶或进行避障操作;
识别正确率:漏检和误检均视为检测失败,99.9%;
实时性:识别频率达到10Hz 及以上;
识别距离:30m。
车-场协同感知
类型一:引导
场端功能要求:
1. 感知内容:空车位,正确识别一个车位是否空置可以停车;
2. 识别正确率:99.99%;
3. 实时性:识别频率达到10Hz 及以上;
4. 感知范围:停车场内所有需覆盖停车位;
车端功能要求:车端感知要求与纯车端功能感知功能要求相同。
类型二:重点地段增强
此类场景中,场端可以针对车端比较难以处理的场景、路段进行重点监测,形成对车端信息的重要补充,如可布置在路口增强左转感知范围、布置在电梯口增强行人感知以及其他车端感知盲区等,场端没有覆盖的区域则需要车端自主负责感知。场端功能要求:
1. 感知内容:空车位,并覆盖除草丛、可行驶区域、地图已经表达的停车桩等信息之外的所有车端感知内容;
2. 识别率:以车端感知最高要求为准;
3. 实时性:识别频率达到10Hz 及以上;
4. 感知距离:30m。
车端功能要求:车端感知要求与纯车端功能感知功能要求相同。
类型三:全场感知
此类场景中,场端覆盖停车场内所有区域,为车端提供持续的感知信息支持。场端功能要求:
1. 感知内容:空车位,覆盖除草丛、可行驶区域、地图已经表达的停车桩等信息之外的所有车端感知内容;
2. 识别率:以车端感知最高要求为准,全场范围内要求保持一致;
3. 实时性:识别频率达到10Hz 及以上;
4. 感知范围:停车场内所有区域。
车端功能要求:车辆需要对车身周围环境进行持续监测,覆盖场端感知覆盖困难的感知内容。
1. 感知内容:草丛,停车桩,可行驶区域等;
2. 识别率:每个感知内容与纯车端感知功能要求中对应分类识别率要求一致;
3. 实时性:识别频率达到10Hz 及以上;
4. 感知距离:与纯车端感知功能要求中对应分类识别距离要求一致。
V2X
V2X感知需覆盖场端感知的所有内容,功能要求与场端感知功能要求一致,并在此基础上对停车场运营提供以下感知支持:
1. 感知内容:红绿灯状态,车位锁状态,闸机状态,机械停车位状态,空车位,充电桩、停车场限位信息等;
2. 功能可用性:99.99%;
3. 实时性:识别频率达到10Hz 及以上;
4. 感知距离:停车场内所有需覆盖区域。
AVP 感知位置精度要求
无论车端、场端以及V2X,要保证自动驾驶功能安全,都需要将感知目标的位置信息提供给自动驾驶系统,在此对感知的位置精度要求如下。
1. 场端和V2X的感知位置精度(相对精度)误差应不大于20cm。
2. 车端,根据车辆与感知目标距离:
2.1 5m 以内,位置精度最大误差不得大于10%, 平均精度误差不得大于5%;
2.2 5m 到15m,位置精度最大误差不得大于12%, 平均精度误差不得大于7%;
2.3 15m 到30m,位置精度最大误差不得大于15%, 平均精度误差不得大于10%。