理论计算见上一篇:
如何判断一个角是否大于180度?_kv1830的博客-CSDN博客
此篇为代码实现
一。直接上代码:
import cv2 as cv
import numpy as np
import math
def get_vector(p_from, p_to):
return p_to[0] - p_from[0], p_to[1] - p_from[1]
def get_unit_vector(v):
"""
获取单位向量
"""
x, y = v
length = (x ** 2 + y ** 2) ** 0.5
return x / length, y / length
def calc_angle_by_sincos(sin, cos):
if sin >= 0 and cos >= 0:
angle = math.asin(sin)
elif cos < 0:
angle = math.pi - math.asin(sin)
elif sin < 0 and cos >= 0:
angle = math.asin(sin) + math.pi * 2
else:
raise ValueError(f'ignore case: sin: {sin}, cos: {cos}')
angle = angle * 180 / math.pi
return angle
def calc_angle_by_axis_x(v):
"""
由向量计算与x轴的夹角,x轴顺时针到向量
"""
x, y = get_unit_vector(v)
return calc_angle_by_sincos(y, x)
def calc_angle(p_a, p_b, p_c):
"""
角点为p_b,由b_a顺时针转到b_c的角
注:y轴向下,就是顺时针,比如在opencv中。
y轴向上,就是逆时针。所以顺逆只在一念之间~~
"""
print(f'p_a: {p_a}, p_b: {p_b}, p_c: {p_c}')
v_ba = get_vector(p_b, p_a)
v_bc = get_vector(p_b, p_c)
v_ba, v_bc = get_unit_vector(v_ba), get_unit_vector(v_bc)
x1, y1 = v_ba
x2, y2 = v_bc
# 求解旋转方程
a = np.array([[-y1, x1], [x1, y1]], dtype=np.float32)
b = np.array([x2, y2], dtype=np.float32)
result_flag, (sin, cos) = cv.solve(a, b)
sin = sin[0]
cos = cos[0]
print(f'sin = {sin}, cos = {cos}')
angle = calc_angle_by_sincos(sin, cos)
return angle
points = [(0, 0), (0, 0), (0, 0)]
current_p_index = 0
img = None
# mouse callback function
def draw_angle(event, x, y, flags, param):
global points, current_p_index, img
if event == cv.EVENT_LBUTTONDOWN:
if current_p_index == 0:
img = np.zeros((800, 800, 3), dtype=np.uint8)
points[current_p_index] = (x, y)
cv.circle(img, (x, y), 10, (0, 0, 255), -1, cv.LINE_AA)
if current_p_index > 0:
last_p = points[current_p_index - 1]
cv.line(img, (x, y), last_p, (255, 0, 0), 2, cv.LINE_AA)
current_p_index += 1
if current_p_index == 3:
angle = calc_angle(points[0], points[1], points[2])
print(f'angle = {angle}')
current_p_index = 0
start_angle = calc_angle_by_axis_x(get_vector(points[1], points[0]))
end_angle = calc_angle_by_axis_x(get_vector(points[1], points[2]))
if end_angle < start_angle:
end_angle += 360
print(f'other_angle: {end_angle - start_angle}')
# end_angle = start_angle + angle
print(f'start_angle = {start_angle}, end_angle = {end_angle}')
cv.ellipse(img, points[1], (15, 15), 0, start_angle, end_angle, (0, 255, 0), -1, cv.LINE_AA)
cv.imshow('img', img)
if __name__ == '__main__':
cv.namedWindow('img', cv.WINDOW_NORMAL)
img = np.zeros((800, 800, 3), dtype=np.uint8)
cv.imshow('img', img)
cv.setMouseCallback('img', draw_angle)
cv.waitKey()
cv.destroyAllWindows()
二。稍加说明
1.demo使用方法
直接运行,在画布上依次按鼠标左键,点出点1,点2,点3,然后触发角度计算,绿色部分表示算的是哪个角。
注:按照上篇的说法,应该是点1绕点2逆时针旋转到点3。但是这里做了个变化,不是逆时针了,是顺时针了!为啥呢,因为在opencv中,y轴正方向是向下的,所以如果要逆时针旋转,那上篇的旋转公式得变一下才行。如果不想改变也很简单,就是定为由点1绕点2顺时针旋转到点3,即我们要求的大角。
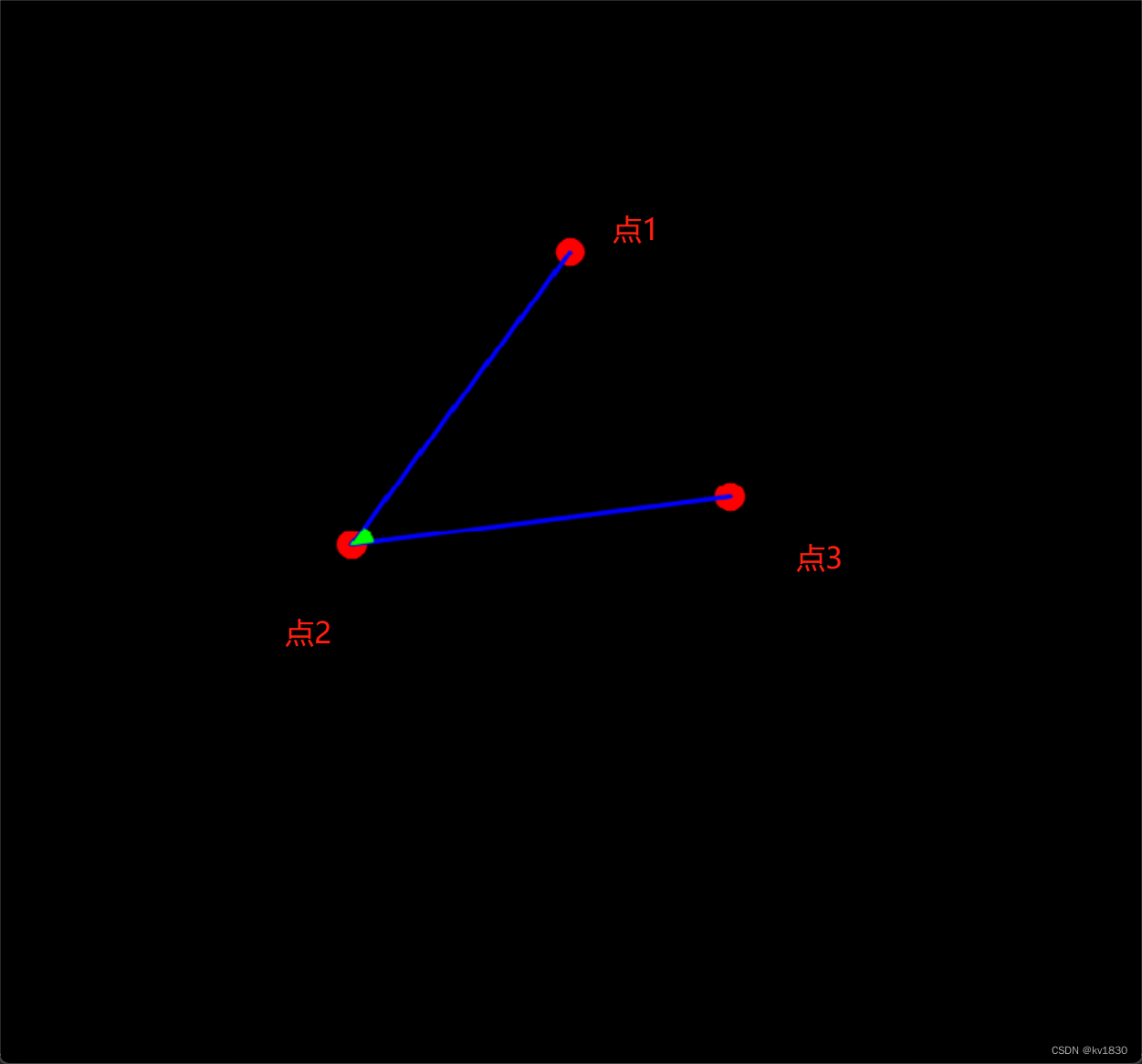
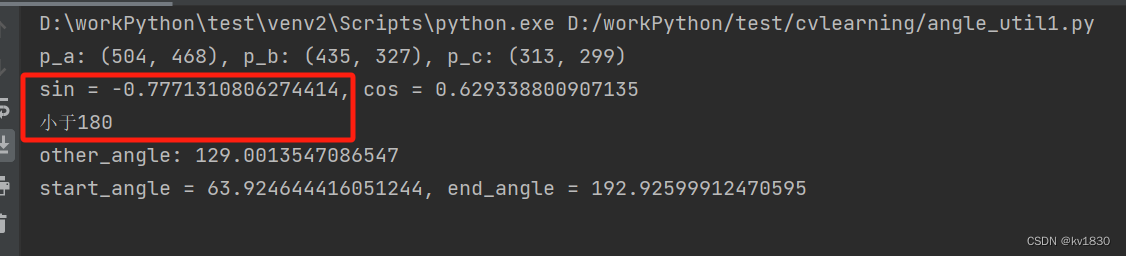
运行结果如下图,红框里就是我们要求的值,绿框里的两个角度其实就图画的绿色的椭圆的起始角和终止角。 
2.疑问
(1)这里会发现一个问题,其实不一定非得通过旋转公式来计算出旋转角,直接用终止边(图1的边2_3)的角度减去起始边(图1的边2_1)的角度,就可以得出旋转角的角度,但是这个角度有可能会小于0,此时直接把它加上360度,就OK了。其实这里可能为负的情况,就是起始边到终止边跨0度的问题,比如起始边是350度,终止边是10度,这样其实是顺时针转了20度,但是10-350会得到-340,再加360,就是20度啦。
3.更简单的方法
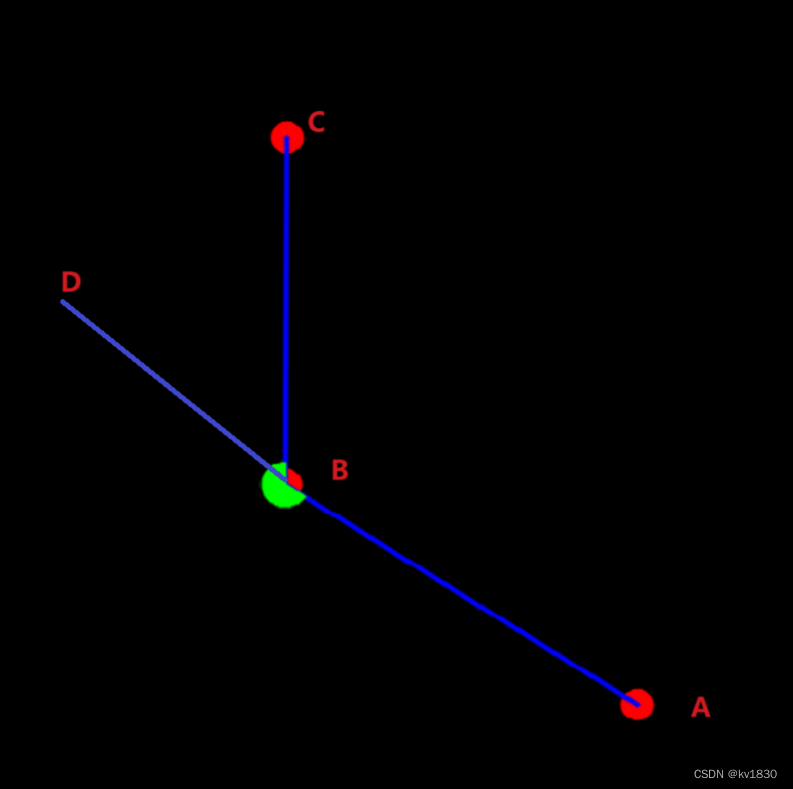
但是如果我们只想知道这个角是不是大于180度的话,其实还有一种结合旋转公式的更简单的判断方法,如下图,不再去求ABC的角,而是AB向量与BC向量的夹角(不过仍然是大角的概念),具体来说就是在AB延长线上取一点D,求的就是DBC大角,所以是D绕点B顺时针转到C的角度(注意这里顺时针是针对opencv y轴向下的情况)。
就下图来说求出来的DBC大角肯定是大于180度了,其sin值会小于0,相反,其对应的ABC就是小于180度。

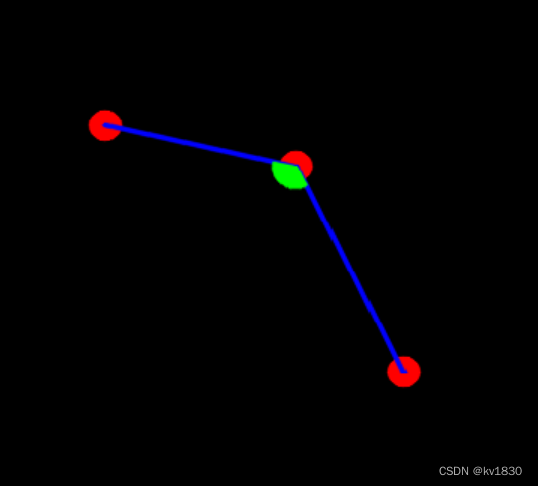
再来看一个大角ABC大于180度的情况,此时DBC是小于180度的,则其sin值大于0
所以综上,由旋转公式求DBC的sin值,小于0,则ABC是小于180度,否则大于180度(如果要看0度,那就是等于0喽)
直接放上修改后的代码。
import cv2 as cv
import numpy as np
import math
def get_vector(p_from, p_to):
return p_to[0] - p_from[0], p_to[1] - p_from[1]
def get_unit_vector(v):
"""
获取单位向量
"""
x, y = v
length = (x ** 2 + y ** 2) ** 0.5
return x / length, y / length
def calc_angle_by_sincos(sin, cos):
if sin >= 0 and cos >= 0:
angle = math.asin(sin)
elif cos < 0:
angle = math.pi - math.asin(sin)
elif sin < 0 and cos >= 0:
angle = math.asin(sin) + math.pi * 2
else:
raise ValueError(f'ignore case: sin: {sin}, cos: {cos}')
angle = angle * 180 / math.pi
return angle
def calc_angle_by_axis_x(v):
"""
由向量计算与x轴的夹角,x轴顺时针到向量
"""
x, y = get_unit_vector(v)
return calc_angle_by_sincos(y, x)
def judge_angle(p_a, p_b, p_c):
"""
角点为p_b,由b_a顺时针转到b_c的角
注:y轴向下,就是顺时针,比如在opencv中。
y轴向上,就是逆时针。所以顺逆只在一念之间~~
"""
print(f'p_a: {p_a}, p_b: {p_b}, p_c: {p_c}')
v_ab = get_vector(p_a, p_b)
v_bc = get_vector(p_b, p_c)
v_ab, v_bc = get_unit_vector(v_ab), get_unit_vector(v_bc)
x1, y1 = v_ab
x2, y2 = v_bc
# 求解旋转方程
a = np.array([[-y1, x1], [x1, y1]], dtype=np.float32)
b = np.array([x2, y2], dtype=np.float32)
result_flag, (sin, cos) = cv.solve(a, b)
sin = sin[0]
cos = cos[0]
print(f'sin = {sin}, cos = {cos}')
return sin < 0
points = [(0, 0), (0, 0), (0, 0)]
current_p_index = 0
img = None
# mouse callback function
def draw_angle(event, x, y, flags, param):
global points, current_p_index, img
if event == cv.EVENT_LBUTTONDOWN:
if current_p_index == 0:
img = np.zeros((800, 800, 3), dtype=np.uint8)
points[current_p_index] = (x, y)
cv.circle(img, (x, y), 10, (0, 0, 255), -1, cv.LINE_AA)
if current_p_index > 0:
last_p = points[current_p_index - 1]
cv.line(img, (x, y), last_p, (255, 0, 0), 2, cv.LINE_AA)
current_p_index += 1
if current_p_index == 3:
result = judge_angle(points[0], points[1], points[2])
print('小于180' if result else '大于180')
current_p_index = 0
start_angle = calc_angle_by_axis_x(get_vector(points[1], points[0]))
end_angle = calc_angle_by_axis_x(get_vector(points[1], points[2]))
if end_angle < start_angle:
end_angle += 360
print(f'other_angle: {end_angle - start_angle}')
# end_angle = start_angle + angle
print(f'start_angle = {start_angle}, end_angle = {end_angle}')
cv.ellipse(img, points[1], (15, 15), 0, start_angle, end_angle, (0, 255, 0), -1, cv.LINE_AA)
cv.imshow('img', img)
if __name__ == '__main__':
cv.namedWindow('img', cv.WINDOW_NORMAL)
img = np.zeros((800, 800, 3), dtype=np.uint8)
cv.imshow('img', img)
cv.setMouseCallback('img', draw_angle)
cv.waitKey()
cv.destroyAllWindows()
这里为什么说更简单呢,因为不用再根据正弦余弦的4种情况来求角,也没用到反正弦反余弦,只要判断一下sin值的正负就行了,是不是更简单一点。