文章目录
- abstract
- 向量的基本概念
- 向量
- 向量的坐标分解式和坐标👺
- 向量的模@向量的长度(大小)👺
- 零向量
- 单位向量👺
- 方向向量
- 非零向量的单位向量@正规化
- 向量夹角👺
- 向量方向角和向量间夹角@投影
- 几何描述向量的线性运算
- 向量的加减运算
- 向量的三角形三边不等式
- 数乘
- 方程的思想求解向量相关问题
- 向量的线性运算的坐标表示公式
abstract
- 向量代数@向量基本概念和向量线性运算
向量的基本概念
- 平面向量和空间向量是类似的,这里主要以空间向量为主讨论
向量
- 既有大小(模)又有方向的量,称为向量(或矢量)
- 印刷体常用黑体字母表示向量
- 手写通常用头箭头表示向量
- 向量的大小也被称为模
- 只考虑方向和大小(而不考虑起点)的向量称为自由向量
- 这里的向量是抽象向量的一个简化版本 n n n个数构成的数组,而在例如高等代数中讨论的,在线性空间中有含义更加广的向量以及更加深刻的性质研究
向量的坐标分解式和坐标👺
- 向量的坐标(表示):
- 向量的终点在坐标轴上的投影坐标 a x , a y , a z a_x,a_y,a_z ax,ay,az叫做向量 a \boldsymbol{a} a的坐标,记为 a = ( a x , a y , a z ) \boldsymbol{a}=(a_x,a_y,a_z) a=(ax,ay,az)
- 向量的坐标分解式= a x i + a y j + a z k a_{x}\boldsymbol{i}+a_{y}\boldsymbol{j}+a_{z}\boldsymbol{k} axi+ayj+azk
- 更多详见向量坐标分解式相关章节
向量的模@向量的长度(大小)👺
- 向量的模:
a
T
=
(
a
x
,
a
y
,
a
z
)
\boldsymbol{a}^T=(a_x,a_y,a_z)
aT=(ax,ay,az),则
∣
a
∣
=
a
x
2
+
a
y
2
+
a
z
2
|\boldsymbol{a}|=\sqrt{a_x^2+a_y^2+a_z^2}
∣a∣=ax2+ay2+az2=
(
a
x
,
a
y
,
z
y
)
⋅
(
a
x
,
a
y
,
a
z
)
\sqrt{(a_x,a_y,z_y)\cdot(a_x,a_y,a_z)}
(ax,ay,zy)⋅(ax,ay,az)
- 在空间直角坐标系中,该公式是根据勾股定理得到
- a ⋅ a = a x 2 + a y 2 + a z 2 \boldsymbol{a}\cdot\boldsymbol{a}=a_x^2+a_y^2+a_z^2 a⋅a=ax2+ay2+az2,这里假设 a \boldsymbol{a} a是列向量
- 如果引入矩阵乘法(向量内积)的表示方法,还可以写作 ∣ a ∣ = a T a |\boldsymbol{a}|=\sqrt{\boldsymbol{a}^T\boldsymbol{a}} ∣a∣=aTa,其中 a T , a \bold{a}^T,\bold{a} aT,a分别是行向量以及其转置得到的列向量
零向量
- 零向量:模为0的向量称为零向量,其方向可以看作任意的,记为 0 \bold{0} 0或 0 ⃗ \vec{0} 0
- 由于零向量与另一个向量的夹角的取值在 [ 0 , π ] [0,\pi] [0,π]内任意取值,因此可以认为零向量和任意向量平行,也可以认为零向量和任意向量垂直
单位向量👺
- 单位向量:模为1的向量称为单位向量
- 通常向量 a \boldsymbol{a} a的同向单位向量记为 a 0 \boldsymbol{a}^{0} a0
- 对于给定的一个方向 l \boldsymbol{l} l,记该方向的单位向量为 e l \boldsymbol{e}_{\boldsymbol{l}} el或 l 0 \boldsymbol{l}_0 l0或 l 0 \boldsymbol{l}^{0} l0,或 u \mathbf{u} u
- 每个方向都有单位向量,方向相同的向量的单位向量完全相同
- 不同方向的单位向量长度都为1,但是方向不同
- 向量的坐标和单位向量表示加法表示
- 取 i = ( 1 , 0 , 0 ) \boldsymbol i=(1,0,0) i=(1,0,0), j = ( 0 , 1 , 0 ) \boldsymbol j=(0,1,0) j=(0,1,0), k = ( 0 , 0 , 1 ) \boldsymbol k=(0,0,1) k=(0,0,1),它们分别是 x , y , z x,y,z x,y,z轴的方向单位向量
- 则 a = ( a x , a y , a z ) = a x i + a y j + a z k \boldsymbol{a}=(a_x,a_y,a_z)=a_x\boldsymbol{i}+a_y\boldsymbol{j}+a_z\boldsymbol{k} a=(ax,ay,az)=axi+ayj+azk
方向向量
- 这个概念在讨论解析几何中的直线时,直线的点向式方程由直线的某个方向向量和直线上的一个点确定
- 方向向量不一定是单位向量
- 例如,直线 l l l过 P 0 ( x 0 , y 0 ) P_0(x_0,y_0) P0(x0,y0),直线的某个方向向量为 ( 1 , 2 ) (1,2) (1,2),则方程可以表示为 x − x 0 1 \frac{x-x_0}{1} 1x−x0= y − y 0 1 \frac{y-y_0}{1} 1y−y0
非零向量的单位向量@正规化
-
设非零向量 a = ( a x , a y , a z ) a=(a_x,a_y,a_z) a=(ax,ay,az)
- a 0 = a ∣ a ∣ a^{0}=\frac{a}{|a|} a0=∣a∣a= 1 ∣ a ∣ ( a x , a y , a z ) \frac{1}{|a|}(a_x,a_y,a_z) ∣a∣1(ax,ay,az)
-
使用范数表示
-
∣ ∣ a ∣ ∣ ||a|| ∣∣a∣∣表示向量 a a a的 L 2 L^2 L2范数
-
β = 1 ∣ ∣ α ∣ ∣ α \beta=\frac{1}{||\alpha||}\alpha β=∣∣α∣∣1α的长度一定是1
-
∣ ∣ β ∣ ∣ ||\beta|| ∣∣β∣∣= ∣ ∣ 1 ∣ ∣ α ∣ ∣ α ∣ ∣ \left|\left|\frac{1}{||\alpha||}\alpha\right|\right| ∣∣α∣∣1α = 1 ∣ ∣ α ∣ ∣ ∣ ∣ α ∣ ∣ = 1 \frac{1}{||\alpha||}||\alpha||=1 ∣∣α∣∣1∣∣α∣∣=1
-
向量夹角👺
- 向量夹角
- 设向量
a
=
O
A
→
,
b
=
O
B
→
a=\overrightarrow{OA},b=\overrightarrow{OB}
a=OA,b=OB,则他们的夹角记为
θ
=
∠
A
O
B
=
<
a
,
b
>
,
且
θ
∈
[
0
,
π
]
\theta=\angle{AOB}=<a,b>,且\theta\in[0,\pi]
θ=∠AOB=<a,b>,且θ∈[0,π]
- 若 θ = 0 \theta=0 θ=0,则 a , b a,b a,b同向
- 若 θ = π \theta=\pi θ=π,则 a , b a,b a,b反向
- 两者统称为 a , b a,b a,b平行,记为 a ∥ b a\parallel{b} a∥b
- 若
a
=
λ
b
a=\lambda{b}
a=λb,则
a
,
b
a,b
a,b平行
- 若 λ > 0 \lambda>0 λ>0, a , b a,b a,b同向
- 若 λ < 0 \lambda<0 λ<0, a , b a,b a,b反向
- 若 θ = π 2 \theta=\frac{\pi}{2} θ=2π,则 a ⊥ b a\perp{b} a⊥b
- 设向量
a
=
O
A
→
,
b
=
O
B
→
a=\overrightarrow{OA},b=\overrightarrow{OB}
a=OA,b=OB,则他们的夹角记为
θ
=
∠
A
O
B
=
<
a
,
b
>
,
且
θ
∈
[
0
,
π
]
\theta=\angle{AOB}=<a,b>,且\theta\in[0,\pi]
θ=∠AOB=<a,b>,且θ∈[0,π]
向量方向角和向量间夹角@投影
- 另见向量的方向角和方向余弦@向量间夹角余弦@投影和向量分量
几何描述向量的线性运算
- 平面二维向量和空间三维向量的运算类似
向量的加减运算
-
借助平行四边形或三角形法则,从几何的角度描述向量的加法和减法
-
并且减法可以转换为加法 a − b = a + ( − b ) \boldsymbol{a}-\boldsymbol{b}=\boldsymbol{a}+(-\boldsymbol{b}) a−b=a+(−b)
-
向量加减运算的代数(坐标)运算比较简单,只需要将向量对应分量相加减: a ± b \boldsymbol{a}\pm\boldsymbol{b} a±b= ( a x ± b x , a y ± b y , a z ± b z ) (a_{x}\pm{b_x},a_y\pm{b_y},a_{z}\pm{b_z}) (ax±bx,ay±by,az±bz)
-
向量加法满足交换律和结合律
-
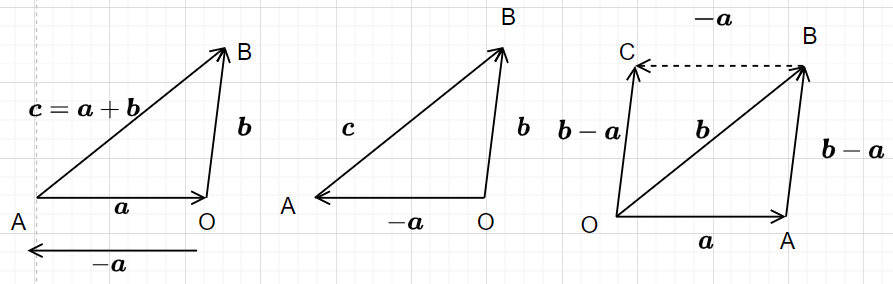
-
c
=
A
B
→
\boldsymbol{c}=\overrightarrow{AB}
c=AB=$\overrightarrow{AO}+\overrightarrow{OB}
= = =\overrightarrow{OB}-\overrightarrow{OA}$ - 并且 ∣ a − b ∣ = ∣ b − a ∣ |\boldsymbol{a}-\boldsymbol{b}|=|\boldsymbol{b}-\boldsymbol{a}| ∣a−b∣=∣b−a∣
-
c
=
A
B
→
\boldsymbol{c}=\overrightarrow{AB}
c=AB=$\overrightarrow{AO}+\overrightarrow{OB}
向量的三角形三边不等式
-
由三角形两边之和大于第三边,对应向量三角形法则下的向量加法和向量减法满足不等式:
-
∣ a + b ∣ ⩽ ∣ a ∣ + ∣ b ∣ |\boldsymbol{a}+\boldsymbol{b}|\leqslant{|\boldsymbol{a}|+|\boldsymbol{b}|} ∣a+b∣⩽∣a∣+∣b∣
-
∣ a − b ∣ |\boldsymbol{a}-\boldsymbol{b}| ∣a−b∣= ∣ b − a ∣ ⩽ ∣ a ∣ + ∣ b ∣ |\boldsymbol{b}-\boldsymbol{a}| \leqslant{|\boldsymbol{a}|+|\boldsymbol{b}|} ∣b−a∣⩽∣a∣+∣b∣
-
-
等号在 a , b \bold{a,b} a,b同向或反向时成立
数乘
-
设 λ \lambda λ是一个数, λ α \lambda{\boldsymbol{\alpha}} λα是一个向量, ∣ λ α ∣ = ∣ λ ∣ ∣ α ∣ |\lambda{\boldsymbol\alpha}|=|\lambda||\boldsymbol\alpha| ∣λα∣=∣λ∣∣α∣
- 当 λ > 0 \lambda>0 λ>0, λ α \lambda\boldsymbol{\alpha} λα与 α \boldsymbol{\alpha} α同向
- 当 λ = 0 \lambda=0 λ=0, λ α = 0 \lambda\boldsymbol{\alpha}=\boldsymbol{0} λα=0
- 当 λ < 0 \lambda<0 λ<0, λ α \lambda\boldsymbol{\alpha} λα和 α \boldsymbol{\alpha} α反向
-
代数表示:设 α = ( a x , a y , a z ) \boldsymbol{\alpha}=(a_{x},a_y,a_z) α=(ax,ay,az),则 λ α = ( λ a x , λ a y , λ a z ) \lambda{\boldsymbol\alpha}=(\lambda{a_x},\lambda{a_y},\lambda{a_z}) λα=(λax,λay,λaz)
-
∣ λ α ∣ |\lambda\boldsymbol{\alpha}| ∣λα∣= ( λ a x ) 2 + ( λ a y ) 2 + ( λ a z ) 2 \sqrt{(\lambda a_{x})^2+(\lambda a_{y})^2+(\lambda a_{z})^2} (λax)2+(λay)2+(λaz)2= λ 2 ( a x 2 + a y 2 + a z 2 ) \sqrt{\lambda^2(a_x^2+a_y^2+a_z^2)} λ2(ax2+ay2+az2)= ∣ λ ∣ ∣ α ∣ |\lambda||\boldsymbol{\alpha}| ∣λ∣∣α∣
-
向量的数乘满足结合律和分配律
方程的思想求解向量相关问题
-
例如求空间中满足某个特征的点的坐标
-
使用建立方程并解方程的方法可以简化思维过程
-
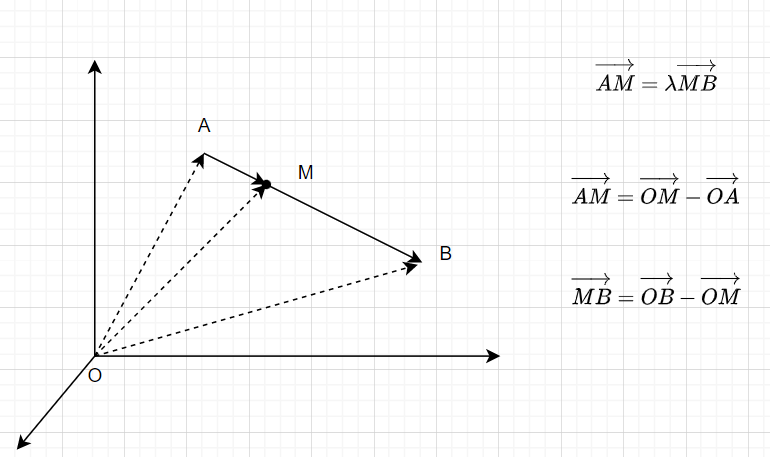
-
设 A M → = λ M B → \overrightarrow{AM}=\lambda\overrightarrow{MB} AM=λMB, A = ( x 1 , y 1 , z 1 ) , B = ( x 2 , y 2 , z 2 ) A=(x_1,y_1,z_1),B=(x_2,y_2,z_2) A=(x1,y1,z1),B=(x2,y2,z2)
-
其中:
- A M → \overrightarrow{AM} AM= O M → − O A → \overrightarrow{OM}-\overrightarrow{OA} OM−OA
- M B → \overrightarrow{MB} MB= O B → − O M → \overrightarrow{OB}-\overrightarrow{OM} OB−OM
-
所以 O M → − O A → = λ ( O B → − O M → ) \overrightarrow{OM}-\overrightarrow{OA} =\lambda(\overrightarrow{OB}-\overrightarrow{OM}) OM−OA=λ(OB−OM)
- ( 1 + λ ) O M → (1+\lambda)\overrightarrow{OM} (1+λ)OM= λ O B → + O A → \lambda\overrightarrow{OB}+\overrightarrow{OA} λOB+OA
- O M → \overrightarrow{OM} OM= 1 1 + λ ( O A → + λ O B → ) \frac{1}{1+\lambda}(\overrightarrow{OA}+\lambda\overrightarrow{OB}) 1+λ1(OA+λOB)= 1 1 + λ ( x 1 + λ x 2 , y 2 + λ y 2 , z 1 + λ z 2 ) \frac{1}{1+\lambda}(x_1+\lambda{x_2},y_2+\lambda{y_2},z_1+\lambda{z_2}) 1+λ1(x1+λx2,y2+λy2,z1+λz2)
向量的线性运算的坐标表示公式
-
利用坐标作向量的线性运算(加法,减法,数乘)是方便的
-
向量的坐标分解式对应了坐标在各个轴上的分量
-
利用相关交换律和结合律,可得
- a + b \boldsymbol{a+b} a+b= ( a x + b x ) i + ( a y + b y ) j + ( a z + b z ) k = ( a x + b x , a y + b y , a z + b z ) (a_x+b_x)\boldsymbol{i}+(a_y+b_y)\boldsymbol{j}+(a_z+b_z)\boldsymbol{k}=(a_x+b_x,a_y+b_y,a_z+b_z) (ax+bx)i+(ay+by)j+(az+bz)k=(ax+bx,ay+by,az+bz)
- a − b \boldsymbol{a-b} a−b= ( a x − b x ) i + ( a y − b y ) j + ( a z − b z ) k = ( a x − b x , a y − b y , a z − b z ) (a_x-b_x)\boldsymbol{i}+(a_y-b_y)\boldsymbol{j}+(a_z-b_z)\boldsymbol{k}=(a_x-b_x,a_y-b_y,a_z-b_z) (ax−bx)i+(ay−by)j+(az−bz)k=(ax−bx,ay−by,az−bz)
- λ a \lambda\boldsymbol{a} λa= λ ( a x , a y , a z ) \lambda(a_x,a_y,a_z) λ(ax,ay,az)



![[vue-router]vue3.x Hash路由前缀问题](https://img-blog.csdnimg.cn/7e8e9690990a4ea28ef024c88b94e21c.png)