前面讲了互斥锁,但是总感觉有些功能互斥锁有些不够用。
条件变量是线程另一可用的同步机制。条件变量给多个线程提供了一个会合的场所。条件变量与互斥量一起使用时,允许线程以无竞争的方式等待特定的条件发生。
条件本身是由互斥量保护的。线程在改变条件状态前必须首先锁住互斥量,其他线程在获得互斥量之前不会察觉到这种改变,因为必须锁定互斥量以后才能计算条件。
条件创建
条件变量使用之前必须首先初始化,pthread_cond_t数据类型代表的条件变量可以用两种方式进行初始化,可以把常量PTHREAD_COND_INITIALIZER赋给静态分配的条件变量,但是如果条件变量是动态分配的,可以使用pthread_cond_destroy函数对条件变量进行去除初始化。
函数原型
int pthread_cond_init(pthread_cond_t *restrict cond, const pthread_condattr_t *restrict attr);
参数
pthread_cond_t *restrict cond:条件的地址
const pthread_condattr_t *restrict attr:条件的参数,一般为NULL就可以
返回值
若成功返回0,否则返回错误编号
条件销毁
函数原型
int pthread_cond_destroy(pthread_cond_t *cond);
参数
pthread_cond_t *restrict cond:条件的地址
返回值
若成功返回0,否则返回错误编号
条件触发
这两个函数可以用于通知线程条件已经满足。pthread_cond_signal函数将唤醒等待该条件的某个线程,而pthread_cond_broadcast函数将唤醒等待该条件的所有进程。
注意一定要在改变条件状态以后再给线程发信号。
函数原型
int pthread_cond_signal(pthread_cond_t *cond);
int pthread_cond_broadcast(pthread_cond_t *cond);
返回值
若成功返回0,否则返回错误编号
条件等待
pthread_cond_wait等待条件变为真。如果在给定的时间内条件不能满足,那么会生成一个代表一个出错码的返回变量。传递给pthread_cond_wait的互斥量对条件进行保护,调用者把锁住的互斥量传给函数。函数把调用线程放到等待条件的线程列表上,然后对互斥量解锁,这两个操作都是原子操作。这样就关闭了条件检查和线程进入休眠状态等待条件改变这两个操作之间的时间通道,这样线程就不会错过条件的任何变化。pthread_cond_wait返回时,互斥量再次被锁住。
函数原型
int pthread_cond_wait(pthread_cond_t *restrict cond, pthread_mutex_t *restrict mutex);
int pthread_cond_timedwait(pthread_cond_t *restrict cond, pthread_mutex_t *restrict mutex, cond struct timespec *restrict timeout);
参数
pthread_cond_t *restrict cond:条件的地址
pthread_mutex_t *restrict mutex:互斥锁的地址
cond struct timespec *restrict timeout:timeout指定了等待的时间,它是通过timespec结果指定。
返回值
若成功返回0,否则返回错误编号
示例:
当 t2 线程将g_data加到3时,t1 线程才开始运行。
#include <stdio.h>
#include <pthread.h>
//int pthread_mutex_init(pthread_mutex_t *restrict mutex, const pthread_mutexattr_t *restrict attr);
//int pthread_mutex_destroy(pthread_mutex_t mutex);
//int pthread_mutex_lock(pthread_mutex_t mutex);
//int pthread_mutex_trylock(pthread_mutex_t mutex);
//int pthread_mutex_unlock(pthread_mutex_t mutex)
//int pthread_cond_init(pthread_cond_t *restrict cond, const pthread_condattr_t *restrict attr);
//int pthread_cond_destroy(pthread_cond_t cond);
//int pthread_cond_wait(pthread_cond_t *restrict cond, pthread_mutex_t *restrict mutex);
//int pthread_cond_timedwait(pthread_cond_t *restrict cond, pthread_mutex_t *restrict mutex, cond struct timespec *restrict timeout);
//int pthread_cond_signal(pthread_cond_t cond);
//int pthread_cond_broadcast(pthread_cond_t cond);
pthread_mutex_t mutex;
pthread_cond_t cond;
int g_data=0;
void *func1(void *arg)
{
printf("t1:%ld thread is creart\n",(unsigned long)pthread_self());
printf("t1:param is %d\n",*((int *)arg));
pthread_mutex_lock(&mutex);
while(1)
{
pthread_cond_wait(&cond,&mutex);
if(g_data==3)
{
printf("ti run==================\n");
}
printf("t1:%d\n",g_data);
g_data=0;
sleep(1);
}
}
void *func2(void *arg)
{
printf("t2:%ld thread is creart\n",(unsigned long)pthread_self());
printf("t2:param is %d\n",*((int *)arg));
while(1)
{
printf("t2:%d\n",g_data);
pthread_mutex_lock(&mutex);
g_data++;
if(g_data ==3 )
{
pthread_cond_signal(&cond);
}
pthread_mutex_unlock(&mutex);
sleep(1);
}
}
int main()
{
int param=100;
char *pret=NULL;
int ret1;
int ret2;
pthread_t t1;
pthread_t t2;
pthread_mutex_init(&mutex,NULL);
pthread_cond_init(&cond,NULL);
ret1=pthread_create(&t1, NULL,func1, (void *)¶m);
ret2=pthread_create(&t1, NULL,func2, (void *)¶m);
if(ret1 == 0)
{
printf("main:create t1 successed\n");
}
if(ret2 == 0)
{
printf("main:create t2 successed\n");
}
pthread_join(t1,NULL);
pthread_join(t2,NULL);
pthread_mutex_destroy(&mutex);
pthread_cond_destroy(&cond);
return 0;
}
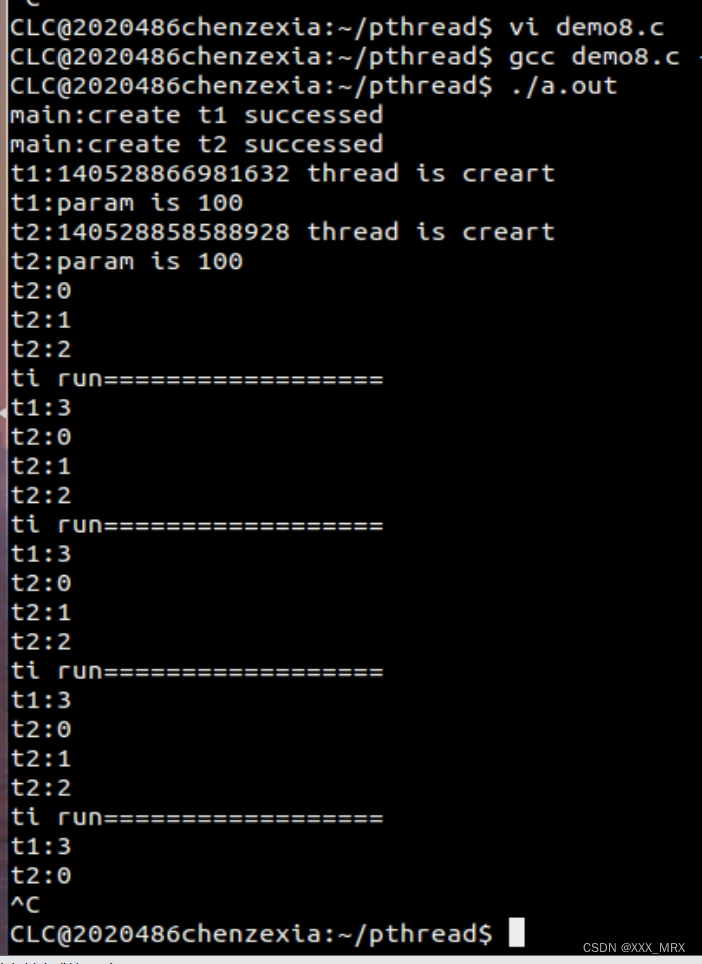
可以看到以上代码,只要g_data加到3 就运行t1线程,并把g_data置为0,然后退出t1线程。
以上代码用的都是条件、互斥锁的动态初始化 pthread_cond_init(&cond,NULL); pthread_mutex_init(&mutex,NULL);,还可以使用宏来进行静态初始化 pthread_cond_t = PTHREAD_INITIALIZER; pthread_mutex_t = PTHREAD_MUTEX_INITIALIZER;
PS代码测试技巧
int main(int argc ,char **argv)
{
int i;
int cnt=atoi(argv[1]);
for(i=0;i<cnt;i++)
{
system("./test");
}
return 0;
}

./a.out 10 >> test.ret.txt &
等测试完毕后可以在test.ret.txt里查看测试的结果,&代表的是后台运行。