文章目录
- 一、分布式训练基础知识
- 1.1 集合通信、集合通信库
- 1.2 通信模式
- 1.2.1 Parameter Server(2014)
- 1.2.2 Ring-AllReduce(2017)
- 1.3 同步范式
- 1.4 大模型训练的目标公式
- 二、数据并行
- 2.1 DataParallel(DP)
- 2.2 DistributedDataParallel(DDP)
- 2.2.1 原理
- 2.2.2 `all-reduce`优化
- 2.2.3 对比DP
- 2.3 ZeRO Data Parallelism
- 三、管道并行(Pipeline Parallelism)
- 3.1 模型并行(MP,Naive Model Parallelism)
- 3.2 GPipe
- 3.2.1 工作原理
- 3.2.2 active checkpoint
- 3.2.3 实验结果
- 3.3 PipeDream
- 四、张量并行(Tensor Parallelism)
- 4.1 1D张量并行
- 4.2 MLP并行
- 4.3 多头注意力并行
- 4.4 实现
- 五、3D并行
- 5.1 Data Parallelism + Pipeline Parallelism
- 5.2 Data Parallelism + Pipeline Parallelism + Tensor Parallelism
- 六、总结:如何选择并行策略
- 6.1 单节点并行化策略
- 6.2 多节点并行化策略
参考资料:
- HF文档 《Efficient Training on Multiple GPUs》、《全网最全-超大模型+分布式训练架构和经典论文》
- 《一文捋顺千亿模型训练技术:流水线并行、张量并行和3D并行》、《大模型-LLM分布式训练框架总结》、《一文了解预训练相关加速技巧》、《Framework(二):分布式训练》
如果在单个 GPU 上训练模型的速度太慢,或者模型的权重在单个 GPU 上装不下,此时就需要多GPU的分布式训练。首先,PyTorch 内置的DataParallel (DP) 和 DistributedDataParallel (DDP)都可用于多 GPU 训练,相比DP,DDP更值得推荐。
一、分布式训练基础知识
1.1 集合通信、集合通信库
参考《分布式训练硬核技术——通信原语》、《NCCL文档》
在计算机科学中,多个处理单元(计算机节点、线程、进程或其他通信实体)之间信息传递的模式有两种:
Point-to-point communication:点对点通信(P2P):一对一的通信方式,通常用于在两个不同的进程或处理单元之间传递数据,是最基本的通信模式;Collective communication:集合通信,一对多或多对多或的通信方式,用于在多个处理单元之间进行协同操作,通常在并行计算环境中使用。
在分布式系统中,各个节点间往往存在大量的集合通信需求,而我们可以用消息传递接口(Message Passing Interface, MPI)来定义一些比较底层的消息通信行为,譬如Broadcast、Reduce、Allreduce、Scatter、Gather、Allgather等。
-
Broadcast:广播行为(对应MPI_Bcast接口)。执行Broadcast时,数据从主节点0广播至其他各个指定的节点(0~3) -
Scatter:和broadcast类似,都是一对多的通信方式。不同的是,Broadcast将0号节点将相同的信息发送给所有的节点,而Scatter则是将数据的不同部分,按需发送给所有的节点。

-
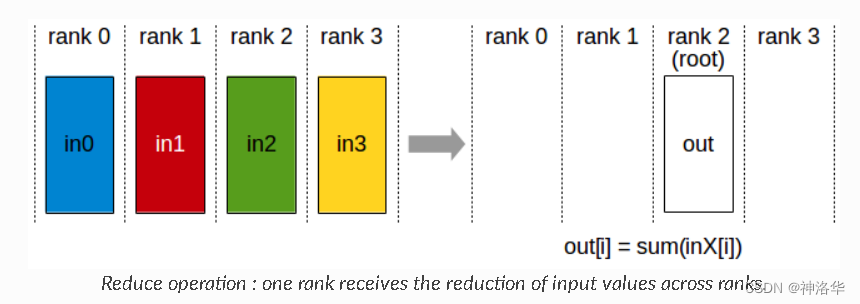
Reduce:规约运算,是一系列简单运算操作的统称,细分可以包括:SUM、MIN、MAX、PROD、LOR等类型的规约操作。Reduce意为减少/精简,因为其操作在每个节点上获取一个输入元素数组,通过执行操作后,将得到精简的更少的元素。
-
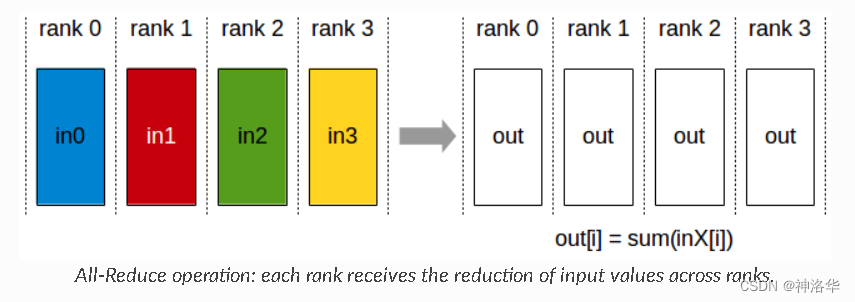
AllReduce:多对多的Reduce,即在所有的节点上都应用同样的Reduce操作。从下图中可以看出,all reduce操作可通过单节点上reduce+broadcast操作完成。
-
Gather:将多个sender上的数据收集到单个节点上,Gather可以理解为反向的Scatter。 -
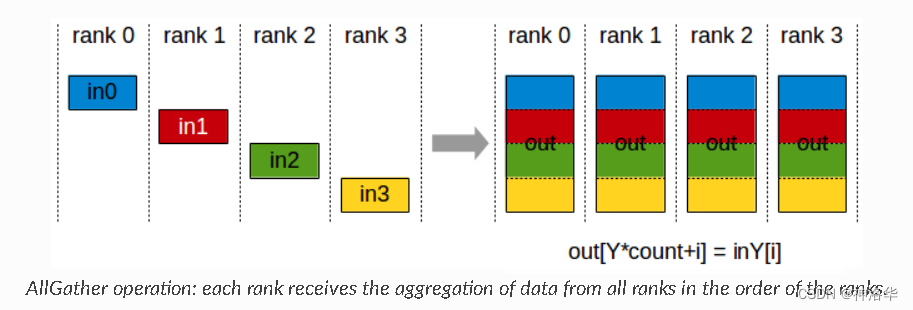
AllGather:多对多的Gather,收集所有数据到所有节点上。从最基础的角度来看,All Gather相当于一个Gather操作之后跟着一个Broadcast操作。
-
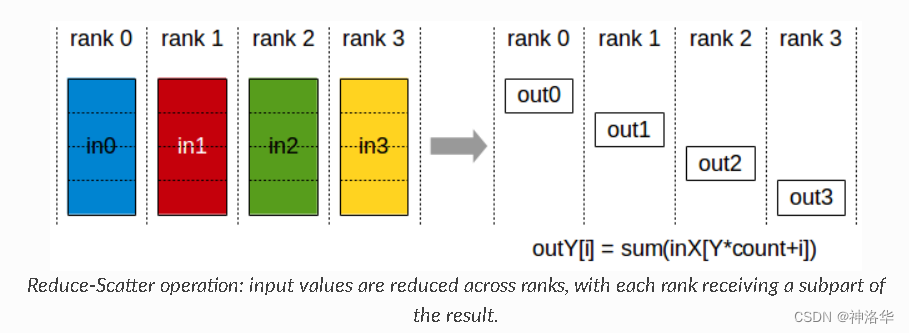
ReduceScatter:将各个节点的输入先进行求和,然后在第0维度按卡数切分,将数据分发到对应的卡上。
上世纪90年代针对HPC领域定义了一套集合通信相关的接口标准,称为 MPI,主要是被应用在科学计算,尤其是超算领域。由于容错性一般,故在机器学习场景下使用较少。
目前流行的集合通信库 Open MPI、NCCL、Gloo等,都在MPI的基础上,对各种集合通信的模式和算法作了各自的实现。例如NCCL(NVIDIA Collective Communications Library)是基于NCIDIA-GPU的一套开源的集合通信库, 针对NVIDIA GPU进行了性能优化,实现多GPU和多节点集体通信原语,所以在在英伟达硬件上能带来更低的延迟和更高的带宽。
1.2 通信模式
参考《Framework(二):分布式训练》、《MXNet之ps-lite及parameter server原理》、《Ring Allreduce》
为了保证分布式训练的结果与单机训练的结果是一致的,需要某种机制在多个机器之间同步信息。目前最流行的模式有两种:
- 参数服务器模式(
Parameter Server,PS):基于参数服务器的中心化架构模式, - 集合通讯模式(
Collective Communication,CC):基于规约(Reduce)的去中心化架构模式。
1.2.1 Parameter Server(2014)

Parameter Server架构具有星状的拓扑结构,有一个或一组服务器来存储模型参数,众多worker服务器负责读取数据,执行前向和反向并计算梯度。通过网络连接,这些worker把自己的梯度上传(push)到参数服务器,参数服务器收集所有的worker的梯度并进行计算之后,各worker再下拉(pull)模型参数。
假设每个节点的数据量是M,在一次梯度同步过程中,N台worker节点都需要和中心PS进行一次通信,则PS节点总通信量为 N×M 。可以看出,这种架构总通信量与集群规模成线性关系。因此,当集群规模较大或模型较大时,参数服务器的带宽可能会成为瓶颈。
1.2.2 Ring-AllReduce(2017)

参数服务器的主要问题是多个 Worker 同时跟 PS 通信,PS 本身有可能成为瓶颈,随着 Worker 数量的增加,整体的通信量也线性增加,加速比可能会停滞在某个点位上。
基于规约的架构是一种去中心化的架构,典型的有Tree All-reduce和Ring All-Reduce(百度于2017年提出)。在Ring All-Reduce架构下,多个worker通过网络组成了一个环,每个worker依次把自己计算出的梯度同步给下一个worker。假设集群规模为N(GPU数量),经过至多 2×(N-1) 轮同步,就可以完成所有worker的更新。
Ring AllReduce 分为3个步骤:Split, ScatterReduce, AllGather。
-
Split阶段:根据集群的规模N,把需要同步的数据平均分成N份。

节点数据平均分为5个分块(Split) -
ScatterReduce阶段:进行N-1次 ScatterReduce 迭代,每次迭代中,GPU将向其右邻居发送一个块,并从其左邻居接收一个块并累积到该块中。各个节点依次交换数据,使得每个节点只包含最终结果的一部分(1/N)。每个GPU发送和接收的块在每次迭代中都是不同的;第n个GPU从发送块N和接收块N - 1开始,然后从那里向后进行,每次迭代都发送它在前一次迭代中接收到的块。

第一次 ScatterReduce 操作




AllGather阶段:各个节点再次交换数据,最终得到完整的结果。此过程与scatter-reduce是相同的(发送和接收的N-1次迭代),只是gpu接收的值没有累加,而是简单地覆盖块。第n个GPU首先发送第n+1个块并接收第n个块,然后在以后的迭代中总是发送它刚刚接收到的块。





AllGather 操作操作完成,所有worker 节点的所有数据块就都包含了来自于其他worker节点的数据
最终,经过N-1次 ScatterReduce 操作和 N-1次 AllGather 操作,整个集群就完成了数据同步。假设每个节点的数据量是M,每一次操作各个worker 节点发送的数据量是 M/N,接收的数据量也是 M/N,则总传输量为:

所以在Ring All-Reduce中,通信成本是恒定的,与系统中gpu的数量无关,完全由系统中gpu之间最慢的连接决定。
所有传输都是在离散迭代中同步进行的,因此所有传输的速度受到环中相邻GPU之间最慢(最低带宽)连接的限制.一般来说,如果一个节点上的所有GPU在环中彼此相邻,则该算法的功能最佳。
1.3 同步范式
在基于参数服务器的架构下,多个worker 间的梯度同步需要通过一个中心节点参数服务器来完成,这不可避免要涉及多个 worker 间的合作,一般来说,模型更新有同步(sync)、异步(async)和混合三种模式。
同步模式是指,当所有worker都完成一次梯度计算和参数更新后,才开始下一轮的迭代。这种模式会出现木桶效应,使得整个集群的速度上限受限于最慢的机器。
异步模式则相反,每个worker只关心自己的进度,完成梯度计算后就尝试更新,至于能跟其他多少个worker“互通有无”则完全随机,其过程不可控,有可能出现无法收敛的问题。
混合模式综合了上述两种方式,各个worker都会等待其他worker完成梯度计算和参数更新,但不是永远等待,而是通过一个超时机制来完成。混合模式虽然也带来了一定的不确定性,但影响并不大,因此其应用也最为普遍。

1.4 大模型训练的目标公式
参考《全网最全-超大模型+分布式训练架构和经典论文》
超大模型训练的总体目标就是提升总的训练速度,减少大模型的训练时间,其总的训练速度的公式为:

-
单卡速度:单卡速度既然是运算速度和数据IO的快慢来决定,那么就需要对单卡训练进行优化,于是主要的技术手段有精度训练、算子融合、梯度累加来加快单卡的训练性能。
-
加速芯片数量:理论上,AI芯片数量越多,模型训练越快。但是,随着训练数据集规模的进一步增长,加速比的增长并不明显。如数据并行就会出现局限性,当训练资源扩大到一定规模时,由于通信瓶颈的存在,增加计算资源的边际效应并明显,甚至增加资源也没办法进行加速。这时候需要通讯拓扑进行优化,例如通过ring-all-reduce的通讯方式来优化训练模式。
-
多卡加速比:多卡加速比既然由计算、通讯效率决定,那么就需要结合算法和集群中的网络拓扑一起优化,于是有了数据并行DP、模型并行MP、流水线并行PP相互结合的多维度混合并行策略,来增加多卡训练的效率。
总的来说呢,超大模型训练的目标就是优化上面的公式,提升总训练速度。核心思想是将数据和计算有关的图/算子切分到不同设备上,同时尽可能降低设备间通信所需的代价,合理使用多台设备的计算资源,实现高效的并发调度训练,最大化提升训练速度。
二、数据并行
2.1 DataParallel(DP)
- 博客《Training Neural Nets on Larger Batches: Practical Tips for 1-GPU, Multi-GPU & Distributed setups》、PyTorch文档DATAPARALLEL
- 知乎:《PyTorch的分布式》、《上手Distributed Data Parallel的详尽教程》、《DataParallel & DistributedDataParallel分布式训练》
最常见的并行训练方式是数据并行(DataParallel),这种方法把输入数据split到各个 workers中(每个worker拥有全部模型)做并行计算,以解决batch size过大的问题。因为求导以及加和都是线性的,所以数据并行在数学上是等价的。
DataParallel是Pytorch中最容易实现的并行方案,只需要增加一行代码 model = nn.DataParallel(model),即可实现多卡训练。
# 数据集的长度为100,batch size为32。模型是一个简单的fc层,输入长度是5,输出是2
input_size,output_size = 5,2
batch_size,data_size = 32,100
model = Model(input_size, output_size)
if torch.cuda.device_count() > 1:
print("Gemfield have ", torch.cuda.device_count(), "GPUs!")
model = nn.DataParallel(model)
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
model.to(device)
rand_loader = DataLoader(dataset=RandomDataset(input_size, data_size),batch_size=batch_size, shuffle=True)
for data in rand_loader:
input = data.to(device)
output = model(input)
上述代码中,batch_size=32。但是由于使用了DataParallel,在有2个GPU时,一个batch被划分成了2份,也就是tensor.split(16),分别送往两个GPU上。
另外,在第一次调用model.to(device)时,模型被加载到了第一个GPU设备上,而在第一次调用output = model(input)也就是第一次执行前向传播时,模型被复制到了其余的GPU上。DataParallel一次迭代的过程总结如下:
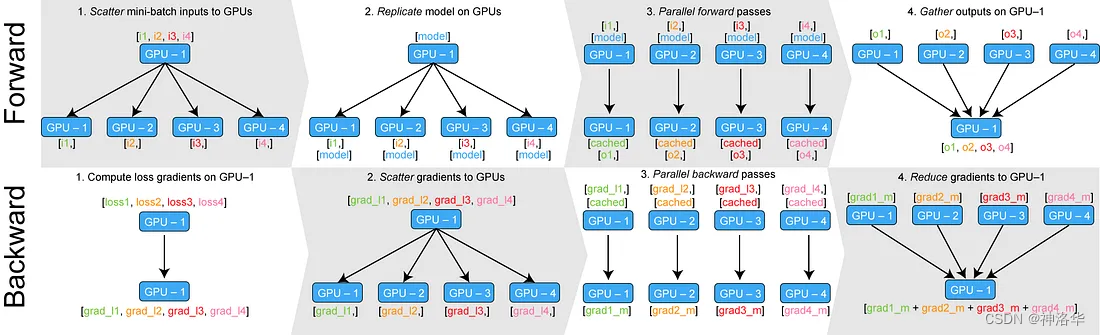
- 主GPU初始化模型,然后复制到每个 GPU上
- 主GPU读取数据批次,然后将一个batch的数据切分成多个更小的batch,分发给不同的GPU;
- 在每个GPU上完成前向计算,输出被
gather到主GPU上进行loss计算 - loss被
scatter到每个GPU上,每个GPU通过BP计算得到梯度; - 每个GPU上的梯度被
reduce到主GPU上,然后模型权重在主GPU上获得更新; - 在下一次迭代之前,主GPU将模型参数
broadcast到其它GPU上,完成权重参数值的同步。
DataParallel采用的是Parameter Server并行架构,有以下局限性:
- 采用 PS 架构通信开销大(每个worker都要与参数服务器多次通信)
- 负载不均衡,主GPU负载大,从而导致 GPU 利用率不足
- 仅支持单机多卡模式,无法实现多机多卡训练
2.2 DistributedDataParallel(DDP)
- 详细原理:《Distributed data parallel training using Pytorch on AWS》 、DDP 文档《DISTRIBUTED DATA PARALLEL》、
- 实践:《GETTING STARTED WITH DISTRIBUTED DATA PARALLEL》、《上手Distributed Data Parallel的详尽教程》、《PyTorch分布式训练简明教程(2022更新版)》
2.2.1 原理
在DDP中,不再有主 GPU,每个 GPU 执行相同的任务。推理,损失函数计算,梯度计算等都可以在各个GPU上并行独立地完成,提高了训练的效率和速度。
DDP实现并行训练的核心在于模型间的梯度同步,这是通过all-reduce通信操作实现的,保证每个GPU会得到完全相同的梯度。每个GPU也会建立独立的优化器。由于模型具有同样的初始状态和后续相同的梯度,因此每轮迭代后不同进程间的模型是完全相同的,这保证了DDP的数理一致性。下面根据DDP的流程图,介绍其主要步骤:

Construction阶段:DDP需要额外的建立进程组阶段(Construction),用于确定通信协议和总进程数- 通信协议是DDP的底层基础,决定了并行训练的方式;
- 总进程数(worldsize):即有多少个独立的并行进程参与训练;
根据需求每个进程可以占用一个或多个GPU,但并不推荐多个进程共享一个GPU,这会造成潜在的性能损失。为了便于理解,在本文的所有示例中我们假定每个进程只占用1个GPU,占用多个GPU的情况只需要简单的调整GPU映射关系就好。
Construction只在训练开始前执行,因此不会带来额外的延迟- 初始状态广播
在每个GPU上创建一个模型的副本(replica),GPU-1中模型的状态会被广播到所有其他进程,确保所有模型具有相同的初始状态。 - 训练迭代:每个GPU接收其分配的数据批次,并在本地(每个GPU本身)计算损失函数的梯度(
local gradients)。 - 全体度求和(
All-Reduce):为了保持模型权重的一致性并允许模型更新,需要将来自各个GPU的local gradients汇总为一个global gradients,这个操作称为all-reduce,其包含两个操作,reduce-scatter和all-gather:

-
Reduce-Scatter:- 每个节点(replica)的
local gradients都被分成不同的块或分片(blocks or shards,通常是均匀分配的),然后在N个 节点之进行 N-1 轮数据交换,这使得每个节点获得了其他节点的一部分梯度信息。 - 每一轮的交换都会将部分梯度数据合并,以获得一部分全局梯度信息。最终每个 replica 都会持有来自所有其他 replica 的梯度分片的汇总(
fully reduced data)
reduced是指每一轮的合并操作,使得shards减少。fully reduced就是指最终所有的梯度shards都被合并成一个值。 - 每个节点(replica)的
-
All-gather:- 每个 replica 将在 Reduce-Scatter 阶段中获得的 fully reduced data再次分成多个小块,然后将其 广播其它节点。同样经过N-1轮数据交换,每个节点都获得了其他节点的全部梯度信息。
- 每个节点根据收集到的全部梯度信息汇总为
global gradients。
-
- 基于
global gradients进行模型参数更新(weight update) - 重复步骤3至5,直到训练完成。
在
Reduce-Scatter阶段,之所以要先将梯度数据被分成不同的shards,再分N-1次进行广播,而不是在一轮之内广播完成,是为了减少通信开销和内存占用,同时提高训练速度和可扩展性。因为在大规模训练中,GPU的数量可能非常大,一次性将不同GPU的local gradients广播给所有GPU可能导致大量的数据流通信,也会占用大量的GPU内存。通过分桶操作,每次只传递local gradients的部分数据,可以减轻网络负载和内存压力,这样训练可以扩展到更多的GPU或更大的模型规模。
2.2.2 all-reduce优化
为了优化性能,DDP中针对all-reduce操作进行了更深入的设计。梯度的计算过程和进程间的通信过程分别需要消耗一定量的时间。等待模型所有的参数都计算完梯度再进行通信显然不是最优的。如下图所示,DDP中的设计是通过将全部模型参数划分为无数个小的bucket,在bucket级别建立all-reduce。当所有进程中bucket0的梯度计算完成后就立刻开始通信,此时bucket1中梯度还在计算。这样可以实现计算和通信过程的时间重叠,使得DDP的训练更高效。

DDP后端的通信由多种CPP编写的协议支持,不同协议具有不同的通信算子的支持,在开发中可以根据需求选择。

2.2.3 对比DP
DDP的优点是负载分散在每个gpu节点上,而且通信成本是恒定的,与 GPU 数量无关,所以训练更快;另外还支持单机多卡和多机多卡。其局限性在于,当模型无法加载在单个GPU时,无法处理。下面通过一个实验来说明 DP 和 DDP 之间的区别。
- Hardware: 2x TITAN RTX 24GB each + NVlink with 2 NVLinks (NV2 in nvidia-smi topo -m).
- Software: pytorch-1.8-to-be + cuda-11.0 / transformers==4.3.0.dev0.
其中一个实验使用NCCL_P2P_DISABLE=1禁用 NVLink 功能,整个测试结果为:
Type NVlink Time
2:DP Y 110s
2:DDP Y 101s
2:DDP N 131s
可以看到,DP 比使用 NVlink 的 DDP 慢 ~10%,但比不使用 NVlink 的 DDP 快 ~15%。真正的区别将取决于每个 GPU 需要与其他 GPU 同步多少数据——要同步的数据越多,slow link就越会阻碍整体runtime。更多内容详见《Efficient Training on Multiple GPUs》
NVLink(NVIDIA NVLink)是由NVIDIA开发的一种高速互连技术,允许不同GPU之间以非常高的带宽进行直接通信,而无需经过较慢的PCI-E总线。
2.3 ZeRO Data Parallelism
参考《ZeRO & DeepSpeed: New system optimizations enable training models with over 100 billion parameters》、《大模型分布式训练策略:ZeRO、FSDP》、《大模型-LLM分布式训练框架总结》
数据并行和模型并行都保持了整个训练过程中所需的所有模型状态,但并不是所有时候这都是必需的。例如,仅在某个层的正向传播和反向传播期间才需要与每个层对应的参数。
ZeRO-DP是一种改进的数据并行性方法,它通过对参数(包括优化器状态、梯度和模型参数)进行分片来消除内存冗余,使得每个GPU仅保存部分参数及相关状态,提高了内存效率;同时还通过在训练过程中使用动态通信来保持计算和通信效率。

参数解释:
Baseline:未优化的基线Ψ:模型大小,上图假设模型参数为Ψ=75亿K:存储优化器状态要消耗的内存倍数,上一节讲过,对于混合精度的Adam优化器而言,K=12- N d N_d Nd:数据并行度。基于Adam优化器的混合精度训练,数据并行度为Nd=64(即64个GPU)
上图展示了ZeRO-DP对数据并行优化的三个阶段:
-
优化器状态分割( P o s P_{os} Pos):
在每个gpu中保存全部的参数和梯度,但是只保存1/Nd的优化器变量。通过将优化器状态进行分割,实现4倍的内存减少,同时保持与DP相同的通信量。 -
梯度分割( P o s + g P_{os+g} Pos+g):
每个gpu中只保存1/Nd的梯度,实现8倍的内存减少,并保持与DP相同的通信量。 -
参数分割( P o s + g + p P_{os+g+p} Pos+g+p):
每个gpu中只保存1/Nd的参数 ,实现64倍的内存减少,通信量会略微增加50%。作者通过用少量的计算的成本和通信成本换来了大幅的内存节省。
Zero DP与DataParallel类似,不同之处在于,每个 GPU 不是复制完整的模型参数、梯度和优化器状态,而是只存储其中的一部分。假设有一个具有 3 层(La、Lb 和 Lc)的简单模型,其中每层有 3 个参数。例如,图层 La 的权重为 a0、a1 和 a2:
La | Lb | Lc
---|----|---
a0 | b0 | c0
a1 | b1 | c1
a2 | b2 | c2
如果我们有 3 个 GPU,ZeRO-DP 会将模型拆分为 3 个 GPU,在某种程度上,这与张量并行性的水平切片相同,与垂直切片相反(垂直切片将整个层组放在不同的 GPU 上),如下所示:
GPU0:
La | Lb | Lc
---|----|---
a0 | b0 | c0
GPU1:
La | Lb | Lc
---|----|---
a1 | b1 | c1
GPU2:
La | Lb | Lc
---|----|---
a2 | b2 | c2
因为采用数据并行,每个GPU会获得一个mini-batch:
x0 => GPU0
x1 => GPU1
x2 => GPU2
La层:3 个 GPU 中的每一个都可以重建完整的张量,并使用自己的小批量进行前向传递。一旦计算完成,不再需要的数据就会被删除 (只在计算过程中使用)
- 在 GPU0 上,x0 批次需要 a0、a1、a2 参数来执行其通过层的正向路径,但 GPU0 只有 a0。它将从 GPU1 获得 a1,从 GPU2 获得 a2,将模型的所有部分组合在一起。
- GPU1将从 GPU0 和 GPU2获取参数a0,a2来计算x1 批次;
- GPU2将从 GPU0 和 GPU1获取参数a0,a1来计算x2 批次;
然后对 Lb 层、Lc层重复整个过程完成前向计算,再反过来完成后向计算。完整工作流程如下:
另外Zero除了Zero DP还包括Zero-R,后续改进工作还有ZeRO-Offload和ZeRO-Infinity,分别实现将GPU的数据和计算卸载到CPU和NVMe内存,能在有限资源下能够训练前所未有规模的模型,而无需对模型代码进行重构。详情见另一篇博客《大模型分布式训练策略:ZeRO、FSDP》。
ZeRO实现:DeepSpeed(实现Zero DP、Zero-R、ZeRO-Offload和ZeRO-Infinity的全部功能 、Accelerate集成、transformers集成
三、管道并行(Pipeline Parallelism)
参考:《Efficient Training on Multiple GPUs》、《一文捋顺千亿模型训练技术:流水线并行、张量并行和3D并行》
3.1 模型并行(MP,Naive Model Parallelism)
当一个模型大到单个GPU无法训练时,最朴素(Naive)的想法是对模型的层进行划分。Naive Model Parallelism(Naive MP)通过使用.to()来将特定层分配到特定的GPU上。当数据通过这些层传递时,它会被移动到与该层相同的GPU上,而其他层保持不变。
Naive MP也被称作Vertical MP,因为模型通常是以垂直方式切分的。下面以一个4层的序列模型为例进行介绍:
o u t p u t = L 4 ( L 3 ( L 2 ( L 1 ( i n p u t ) ) ) ) output=L4(L3(L2(L1(input)))) output=L4(L3(L2(L1(input))))
将其按层划分至两个GPU上:
- GPU1负责计算: i n t e r m e d i a t e = L 2 ( L 1 ( i n p u t ) ) intermediate=L_2(L_1(input)) intermediate=L2(L1(input));
- GPU2负责计算: o u t p u t = L 4 ( L 3 ( i n t e r m e d i a t e ) ) output=L_4(L_3(intermediate)) output=L4(L3(intermediate));

整个朴素层并行前向传播和后向传播的过程如上图所示。GPU1执行前向传播,并将激活(activations)缓存下来。然后将
L
2
L_2
L2 层的输出intermediate发送给GPU2,GPU2完成前向传播和loss计算后,开始反向传播。当GPU2完成反向传播后,会将
L
3
L_3
L3的梯度返还给GPU1。GPU1完成最终的反向传播。
通过以上过程可以发现Naive MP存在一些缺点:
-
低GPU利用率: 在任意时刻,有且仅有一个GPU在工作,其他GPU都是空闲的。
-
计算和通信没有重叠。在发送前向传播的中间结果(FWD)或者反向传播的中间结果(BWD)时,GPU也是空闲的。
-
高显存占用。GPU1需要保存整个batch的所有激活,直至最后完成参数更新。另外Shared embeddings 也需要在不同GPU之间来回复制。如果batch size很大,这将对显存带来巨大的挑战。
Pipeline Parallelism (PP)几乎与Naive MP相同,但通过将传入的batch分成micro-batches并人工创建一个pipeline来解决了GPU空闲问题,允许不同的GPU同时参与计算过程。
3.2 GPipe
论文《GPipe: Easy Scaling with Micro-Batch Pipeline Parallelism》、《图解大模型训练之:流水线并行Gpipe》
3.2.1 工作原理
假设有4个GPU,并将模型按层划分为4个部分。朴素层并行的过程为:

如图,阴影部分所表示的时间段里,总有GPU在空转。在Gpipe中,将阴影部分定义为bubble。假设有 K块GPU,而单块GPU上做一次forward和backward的时间为:
t
f
b
=
(
t
f
+
t
b
)
t_{fb} = (t_{f} + t_{b})
tfb=(tf+tb) 。则:
- 图中灰色长方形的整体面积为: K ∗ K t f b K*Kt_{fb} K∗Ktfb
- 图中实际在做forward和backward的面积为: K t f b Kt_{fb} Ktfb
- 图中阴影部分的面积为: ( K − 1 ) K t f b (K-1)Kt_{fb} (K−1)Ktfb
- 图像阴影部分的占比为: ( K − 1 ) / K (K-1)/K (K−1)/K
则我们定义出bubble部分的时间复杂度为: O ( K − 1 K ) O(\frac{K-1}{K}) O(KK−1)。当K越大,即GPU的数量越多时,空置的比例接近1,即GPU的资源都被浪费掉了。因此这个问题肯定需要解决。

流水线并行的核心思想是:在模型并行的基础上,进一步引入数据并行的办法,即把原先的数据再划分成若干个batch,送入GPU进行训练。未划分前的数据,叫mini-batch。在mini-batch上再划分的数据,叫micro-batch。
图c中,第一个下标表示GPU编号,第二个下标表示micro-batch编号。假设我们将mini-batch划分为M个。假设单个GPU上完成前向传播或者后向传播的面积为1(也就是上图中的单个小方块面积为1)。上图中的总长度为2(M+K-1),宽度为K,则总面积为2K(M+K-1)。其中,彩色小方块占用的面积表示GPU执行的时间,为 2KM;空白处bubble面积的占比为
1
−
2
K
M
2
K
(
M
+
K
−
1
)
1-\frac{2KM}{2K(M+K-1)}
1−2K(M+K−1)2KM=
K
−
1
K
+
M
−
1
\frac{K-1}{K+M-1}
K+M−1K−1
PP的目标是平衡计算强度(即每个micro-batch的大小)和最小化Pipeline中的空闲时间,以提高效率。Gpipe通过实验证明,当
M
>
=
4
K
M>=4K
M>=4K 时,bubble产生的空转时间占比对最终训练时长影响是微小的,可以忽略不计,但这可能会导致更多的通信开销。
将batch切好,并逐一送入GPU的过程,就像一个流水生产线一样(类似于CPU里的流水线),因此也被称为Pipeline Parallelism。
3.2.2 active checkpoint
增大batch size就会线性增大需要被缓存激活的显存需求。在GPipe中,GPU需要在前向传播至反向传播这段时间内缓存激活(activations)。以GPU0为例,micro-batch1的激活需要从timestep 0保存至timestep 13。随着模型的增加,每块GPU中存储的中间结果也会越大。
GPipe为了解决显存的问题,使用了为re-materalization技术,后称为active checkpoint。 该技术不需要缓存所有的激活,而是在反向传播的过程中重新计算激活。这降低了对显存的需求,但是增加了计算代价(时间换空间),图例如下:

每块GPU上,我们只保存来自上一块的最后一层输入z,其余的中间结果我们算完就废。等到backward的时候再由保存下来的z重新进行forward来算出activations。
如果你使用Pytorch提供的pipeline接口,其中有一个参数叫checkpoint,就是用来做这一项的。

3.2.3 实验结果

Gpipe分别在AmoebaNet(图像)和Transformer(自然语言)两个大模型上做了实验。
Naive:单卡Pipeline-N:re-materalization + N卡。AmeobaNet-D和Trasformer-L:超参数的量# of Model Parameter表示模型的参数量Total Model Parameter Memory:模型参数所占内存大小Peak Activation Memory:峰值时中间结果大小。可以发现,中间结果占据的内存大小是相当可观的。
从实验结果里,我们可以发现:
- 在
Transformer上,Gpipe基本实现了模型大小(参数量)和GPU个数之间的线性关系。例如从32卡增到128卡时,模型的大小也从21.08B增加到82.9B,约扩4倍 - 对
AmoebaNet而言,却没有完全实现线性增长。例如从4卡到8卡,模型大小从1.05B到1.8B,不满足2倍的关系。本质原因是AmoebaNet模型在切割时,没有办法像Transformer一样切得匀称,保证每一块GPU上的内存使用率是差不多的。因此对于AmoebaNet,当GPU个数上升时,某一块GPU可能成为木桶的短板。

上图是使用不同数量的GPU数 K 和不同micro-batches数M 在TPUs上进行GPipe Normalized training throughput(吞吐量)。性能随M提高。当 M ≥ K 时,Transformer模型的加速器数量几乎呈线性加速。如果必要,批次大小会根据内存进行调整。
3.3 PipeDream
论文《PipeDream: Generalized Pipeline Parallelism for DNN Training》、《PipeDream: Fast and Efficient Pipeline Parallel DNN Training》、《PipeDream: 数据并行+流水线》


GPipe使用 active checkpoint技术,在反向传播的过程中重新计算激活,降低了对显存的需求。在将mini-batch划分为M个micro-batch后,如果 M 较小,则由于重新计算开销和频繁的管道刷新,其在硬件效率方面可能会受到影响。
GPipe需要等所有的microbatch前向传播完成后,才会开始反向传播。PipeDream则是当一个microbatch的前向传播完成后,立即进入反向传播阶段。理论上,反向传播完成后就可以丢弃掉对应microbatch缓存的激活。由于PipeDream的反向传播完成的要比GPipe早,因此也会减少显存的需求。
下图是PipeDream的调度图,4个GPU和8个microbatchs。蓝色的方块表示前向传播,绿色表示反向传播,数字则是microbatch的id。

PipeDream在bubbles上与GPipe没有区别,但是由于PipeDream释放显存的时间更早,因此会降低对显存的需求。
四、张量并行(Tensor Parallelism)
参考论文:《Efficient Large-Scale Language Model Training on GPU Clusters Using Megatron-LM》、《一文捋顺千亿模型训练技术:流水线并行、张量并行和3D并行》
除了模型并行和数据并行外,还有一种更小尺度的并行方式:张量并行。Transformer中的主要部件是全连接层和注意力机制,其核心都是矩阵乘法。张量并行的核心就是将矩阵乘法进行拆分,解决单层参数过大的问题。
在 Tensor Parallelism 中,每个 GPU 处理张量的一个切片,并且只聚合完整的张量以进行需要它的操作。本章概念详见 Megatron-LM 论文《Efficient Large-Scale Language Model Training on GPU Clusters Using Megatron-LM》。
4.1 1D张量并行
对于全连接层,最朴素的思想就是利用分块矩阵计算法则,获得结果的一致性。下面以矩阵乘法的方式辅助理解1D张量并行。
- 列并行 :将权重矩阵行列划分为n份,那么矩阵乘法表示为
X A = X [ A 1 , A 2 , … , A n ] = [ X A 1 , X A 2 , … , X A n ] XA=X[A_1,A_2,\dots,A_n]=[XA_1,XA_2,\dots,XA_n] XA=X[A1,A2,…,An]=[XA1,XA2,…,XAn] - 行并行 :对权重矩阵和输入矩阵都进行划分,那么矩阵乘法表示为
X A = [ X 1 , X 2 , … , X n ] [ A 1 A 2 … A n ] = X 1 A 1 + X 2 A 2 + ⋯ + X n A n XA=[X_1,X_2,\dots,X_n] \left[ \begin{array}{l} A_1 \\ A_2 \\ \dots \\ A_n \end{array} \right] = X_1A_1+X_2A_2+\dots+X_nA_n XA=[X1,X2,…,Xn] A1A2…An =X1A1+X2A2+⋯+XnAn
可见,无论是行并行还是列并行 ,都只需要在各个部分计算完后进行一次通信。只不过列并行将通信的结果进行拼接,而行并行则是对通信结果相加。
4.2 MLP并行
transformer的一个主要部分是MLP层。下面并模拟两层的全链接层。设X、Y是输入和输出,A和B则是两个全链接层的权重,则有:
Y = G e L U ( G e L U ( X A ) B ) Y={GeLU(GeLU(XA)B)} Y=GeLU(GeLU(XA)B)
使用列并行可写作:
Y
=
G
e
L
U
(
G
e
L
U
(
X
A
)
B
)
=
GeLU
(
GeLU
(
[
X
A
1
,
X
A
2
,
…
,
X
A
n
]
)
[
B
1
B
2
…
B
n
]
)
=
GeLU
(
[
GeLU
(
X
A
1
)
B
1
,
GeLU
(
X
A
2
)
B
2
,
…
,
GeLU
(
X
A
n
)
B
n
]
)
=
[
GeLU
(
GeLU
(
X
A
1
)
B
1
)
,
…
,
GeLU
(
GeLU
(
X
A
n
)
B
n
)
]
\begin{aligned} \text Y={GeLU(GeLU(XA)B)}&=\text{GeLU}\Big(\text{GeLU}([XA_1,XA_2,\dots,XA_n]) \left[ \begin{array}{l} B_1 \\ B_2 \\ \dots \\ B_n \end{array} \right] \Big) \\ &=\text{GeLU}([\text{GeLU}(XA_1)B_1,\text{GeLU}(XA_2)B_2,\dots,\text{GeLU}(XA_n)B_n]) \\ &=[\text{GeLU}(\text{GeLU}(XA_1)B_1),\dots,\text{GeLU}(\text{GeLU}(XA_n)B_n)] \end{aligned}
Y=GeLU(GeLU(XA)B)=GeLU(GeLU([XA1,XA2,…,XAn])
B1B2…Bn
)=GeLU([GeLU(XA1)B1,GeLU(XA2)B2,…,GeLU(XAn)Bn])=[GeLU(GeLU(XA1)B1),…,GeLU(GeLU(XAn)Bn)]
通过上面的公式可以看到。当我们将A和B提前划分好后,就可以独立进行计算,在计算出 G e L U ( GeLU ( X A i ) B i ) {GeLU}(\text{GeLU}(XA_i)B_i) GeLU(GeLU(XAi)Bi) 后再进行通信。也就是说,这个例子中虽然有两个全链接层,但是仅需要在得到最终结果前进行通信即可。 **有多个全链接层堆叠时,仅需要在最终输出时进行一次通信即可。**利用这一原理,我们可以更新任意深度的MLP。

4.3 多头注意力并行
由于多头注意力的各个头之间本质上就是独立的,因此各个头完全可以并行运算。

需要注意的是,TP 需要非常快的网络,因此不建议跨多个节点执行 TP。实际上,如果一个节点有 4 个 GPU,则最高 TP 度数为 4。另外,在DeepSpeed中,将TP称之为tensor slicing。
4.4 实现
- Megatron-LM
- Parallelformers(目前仅提供推理)
- SageMaker :将 TP 与 DP 相结合,以实现更高效的处理,但只能在 AWS 上使用
- OSLO 具有基于 Transformer 的张量并行实现
- Accelerate:集成了 Megatron-LM 的 T张量并行。
五、3D并行
《Using DeepSpeed and Megatron to Train Megatron-Turing NLG 530B, A Large-Scale Generative Language Model》
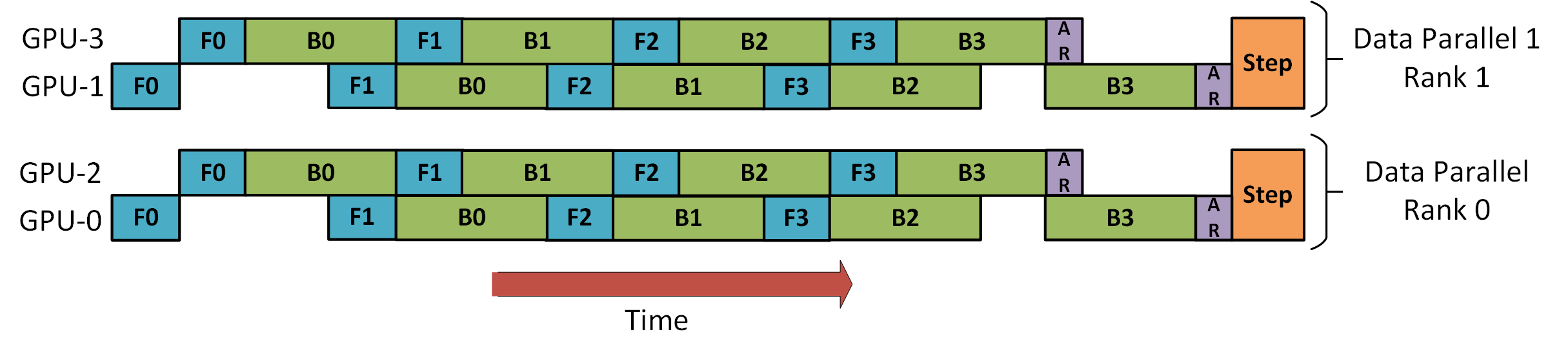
5.1 Data Parallelism + Pipeline Parallelism
DeepSpeed 流水线教程中的演示了如何将 DP 与 PP 结合使用。如下图所示,DP rank 0 看不到GPU2, DP rank 1看不到GPU3,对于 DP,只有 GPU 0 和 1 提供数据,就好像只有 2 个 GPU 一样。GPU0 使用 PP 将其部分负载卸载到 GPU2,同样的GPU1 使用 PP 将其部分负载卸载到 GPU3。由于每个维度至少需要 2 个 GPU,因此这里至少需要 4 个 GPU。
5.2 Data Parallelism + Pipeline Parallelism + Tensor Parallelism
实现:Megatron-DeepSpeed、OSLO
3D并行是由数据并行(DP)、张量并行(TP)和流水线并行(PP)组成。下图参考《 3D parallelism: Scaling to trillion-parameter models,》,由于每个维度至少需要 2 个 GPU,因此这里至少需要 8 个 GPU。此功能可通过DeepSpeed 、Megatron-LM 、Varuna、SageMaker 、OSLO 来实现。

DeepSpeed 的主要功能之一是 ZeRO,它是DP 的超级扩展,这是一个独立的功能,不需要 PP 或 TP。但它可以与PP和TP结合使用。
当 ZeRO-DP 与 PP(或TP)结合使用时,它通常仅启用 ZeRO stage 1(优化器分片)。理论上此时可以启用 ZeRO stage 2(梯度分片),但这会对性能产生负面影响。
- DP本身已经将一个batch的数据进行划分,PP会将
mini-batch进一步划分为micro-batch,这样每一个micro-batch都需要一个额外的 reduce-scatter操作来传递梯度信息,划分的太多会增加通信开销,降低计算效率; - PP本身已经减小了梯度的大小,因为每个阶段只需要处理一部分梯度信息。在这种情况下,进一步采用梯度分片(gradient sharding)来减小梯度的大小可能不会带来显著的内存节省,因为梯度已经相对较小。
同样的道理,此时也不宜启用ZeRO stage 3(参数分片),因为会导致更多的节点间通信。
六、总结:如何选择并行策略
6.1 单节点并行化策略
- 单个GPU可以装入整个模型
- DDP - Distributed DataParallel
- ZeRO:根据使用的情况和配置,这种方法可能会也可能不会更快,但是,值得尝试一下
- 单个GPU无法装入整个模型
- PipelineParallel (PP)
- TensorParallel (TP)
- ZeRO
对于非常快速的节点间连接(例如 NVLINK 或 NVSwitch),所有三种策略(PP、ZeRO、TP)都应该产生相似的性能。但是,如果没有这些,PP 将比 TP 或 ZeRO 更快。另外TP 适合在单节点内使用,即TP size <= GPUs per node。
- 单个GPU无法装入模型最大的layer
- 使用 TensorParallel (TP),因为仅靠 PipelineParallel (PP) 不足以容纳大型层。
- 使用ZeRO,同时参考 Methods and tools for efficient training on a single GPU中的方法,以便在单个 GPU 上进行高效训练。
6.2 多节点并行化策略
- 具有快速的节点间连接(fast inter-node connectivity),例如NVLINK 或 NVSwitch,考虑使用:
- ZeRO :几乎不需要对模型进行任何修改
- 组合使用PP、TP 和DP,这种方法将减少通信,但需要对模型进行重大更改
- 节点间连接速度较慢且 GPU 内存仍然不足时,组合使用PP、TP 、DP和ZeRO。