目录
改善性能的措施:
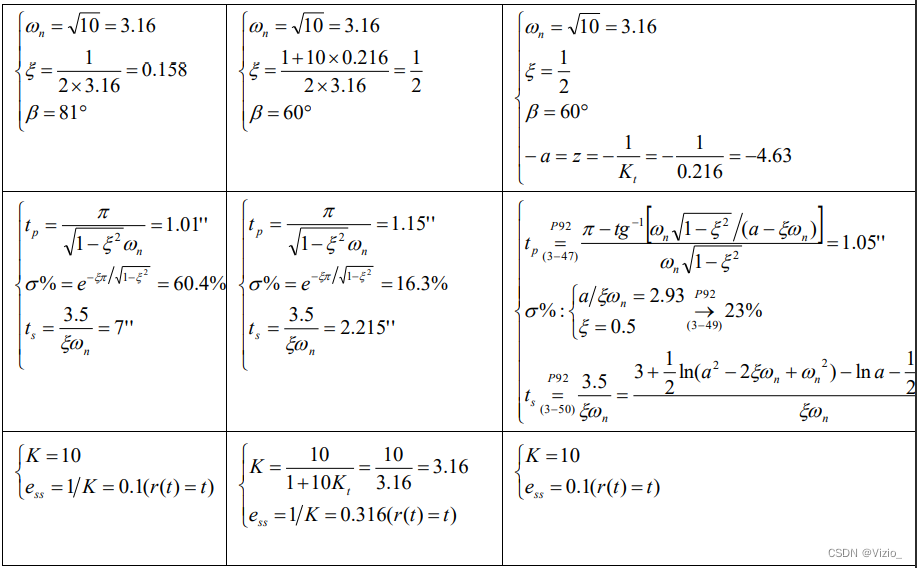
两种改善二阶系统动态性能的措施:
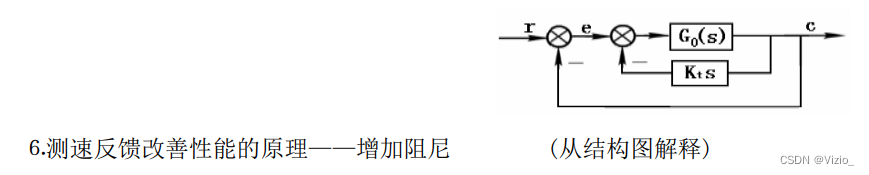
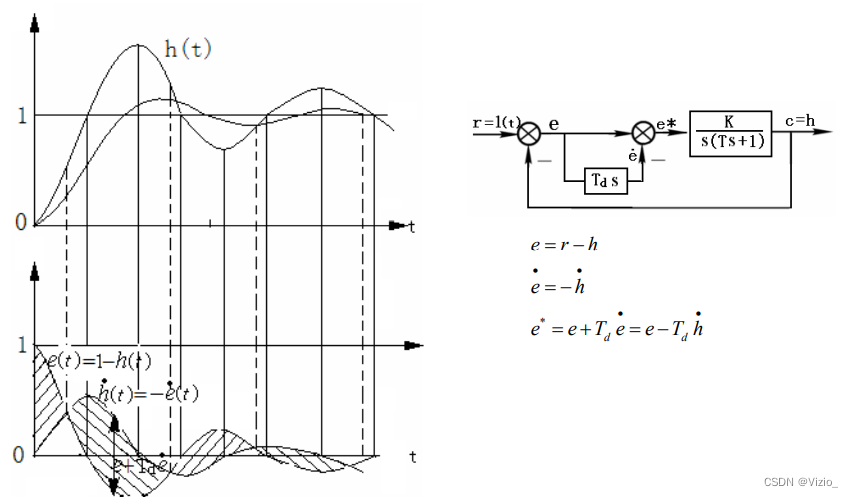
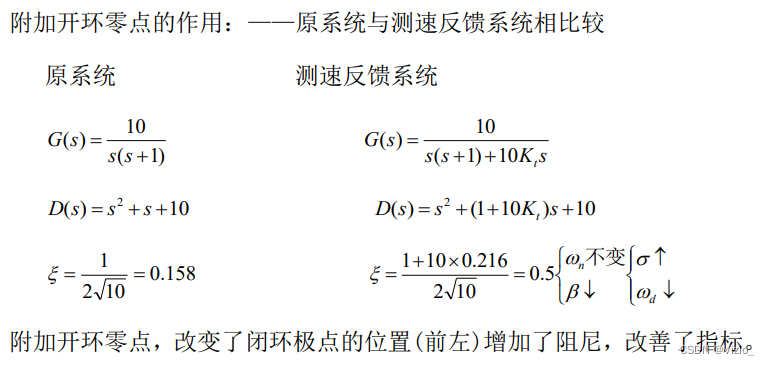
(1)测速反馈——增加阻尼
(2)比例+微分——提前控制
改善系统性能方法对比:
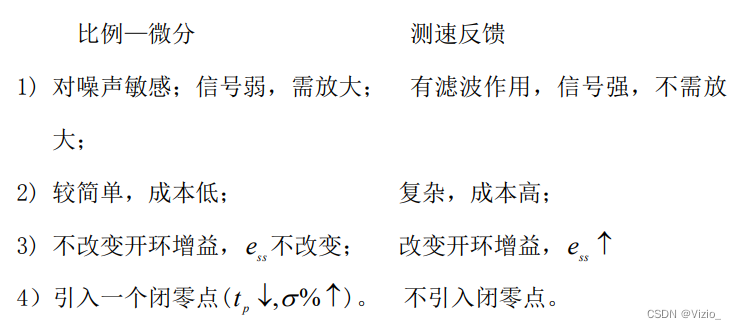
两种改善性能方法的对比:
高阶系统动态性能:
高阶系统的阶跃响应:
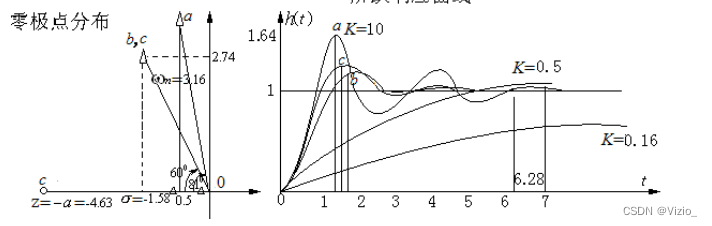
估算高阶系统动态性能指标的零点极点法:
改善性能的措施:
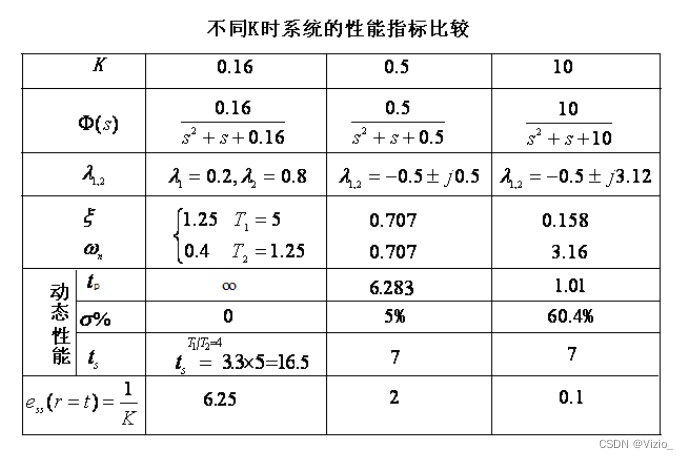
系统的参数选择对系统的动态性能指标影响很大
两种改善二阶系统动态性能的措施:
(1)测速反馈——增加阻尼
(2)比例+微分——提前控制
改善系统性能方法对比: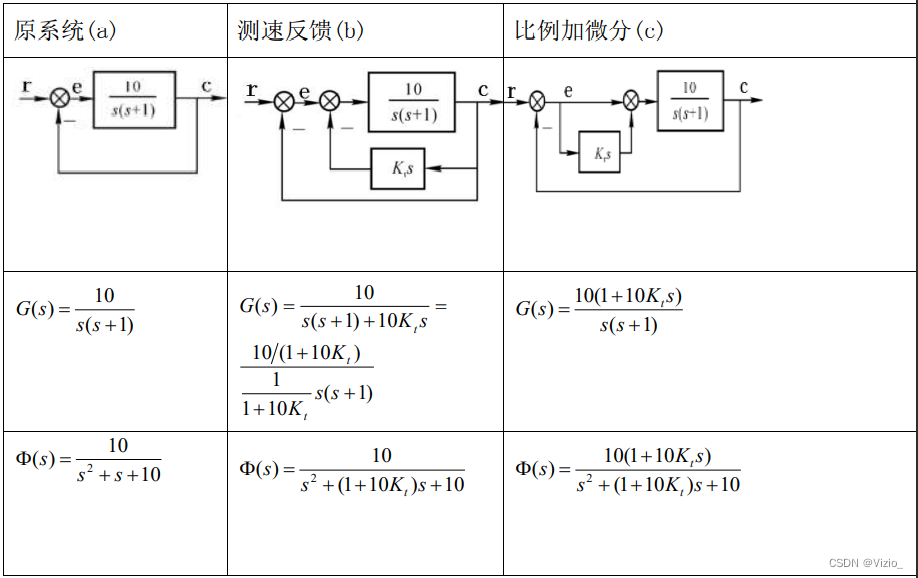
两种改善性能方法的对比:
高阶系统动态性能:
高阶系统的阶跃响应:
高阶系统闭环传递函数一般可表示为
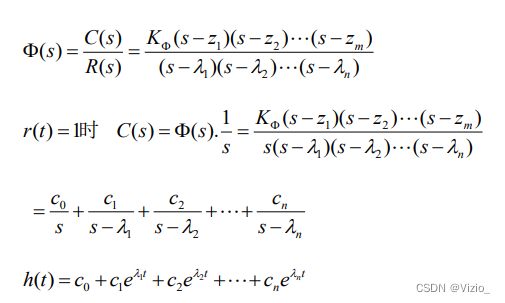
- 闭环主导极点:距离虚轴最近而且附近又没有闭环零点的闭环极点。
- “偶极子”:若两相邻零、极点间的距离比它们本身的模值小一个数量级时,称该零、极点对为“偶极子”,其作用近似抵消,可以忽略相应分量的影响。
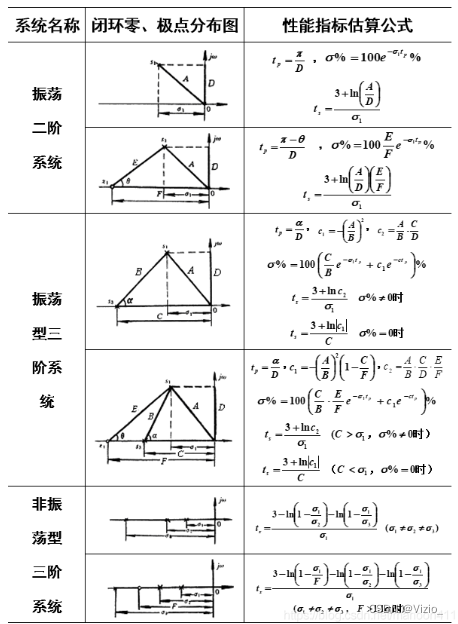
估算高阶系统动态性能指标的零点极点法:
- 由高阶系统的传递函数画出闭环零极点图;
- 略去非主导零极点(此零极点的实部大于主导极点实部的5~6倍以上)和不非常靠近虚轴的“偶极子”,保留主导极点;
- 按下表中相应公式估算系统动态性能。