终于要开始学习&&复习这个知识点了,说句实话半年多之前就该写这篇文章来加强理解,但是一直没有落实,因为又去练习了很多学过的算法,感觉这个算法不太常用哦,传说中的省选算法,比赛比较少见(可能是开不到吧。。。),想把这些东西和思维融为一体确实不容易,那么这就开始吧
网络流
- 简介
- Ford-Fulkerson
- Edmonds–Karp算法
- Dinic
简介
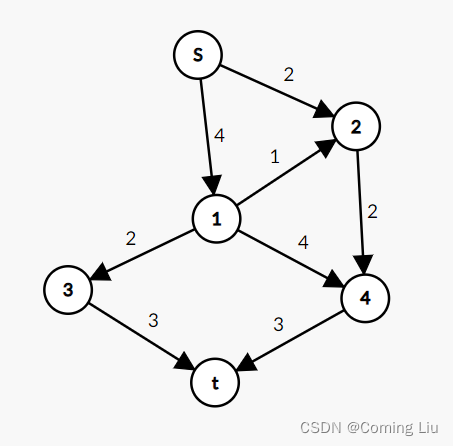
- 如下图, s s s是起点, t t t是终点,其中边权表示每条管道中水的最大流量 ( c a p a c i t y ) (capacity) (capacity),问从 s s s到 t t t一次最多能送多少水
- 我们还要介绍另外两个概念,残留量 ( r e s i d u a l ) (residual) (residual),也就是空闲量,即当前管道里面还能加入多少水,因为开始的时候管道里面水量是 0 0 0,所以一开始管道的空闲量为最大流量;流量 f l o w flow flow,也就是管道里面实际有多少的水,所以对于每条管道,有 f l o w = c a p a c i t y − r e s i d u a l flow=capacity-residual flow=capacity−residual
- 我们想一下怎么解决这个问题,或许我们会想到一种办法,寻找一条从 s s s到 t t t的路径,那么这条路径上面边权最小的那条边权就是路径的瓶颈,也就是这条路径的 f l o w flow flow,这个想法是对的,但是我们接下来怎么办呢,如果再以类似的方法去找另外的路径这样得到的结果不一定是最优,所以引入了反向路径这个概念来解决这个问题
Ford-Fulkerson
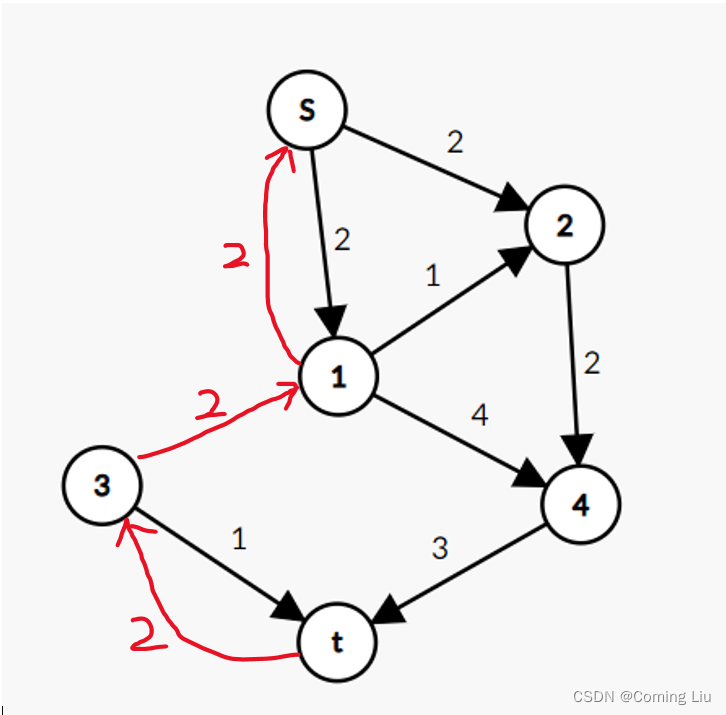
- F F FF FF方法的思路和前面提到的想法有些类似,我们从 s s s出发,随便找一条能够到达 t t t的简单路径,找到路径中的最小值,把整条路经所有边的边权都减去这个值,如果减为 0 0 0,那么视为删除这条边,同时这条路径上的所有边都重新建立一条反向路径,边权和这个最小边权的权值相等,这样就可以起到一个反悔的作用,能够证明这种方法总能够找到最优解
- 上面的这个过程叫做找从 s s s到 t t t的一个增广路,也就是路径上的边的容量都要 > 0 >0 >0
- 比如上面的图我找到了一条从起点到终点的增广路
s
→
1
→
3
→
t
s\rightarrow1\rightarrow3\rightarrow t
s→1→3→t,因为这里面最小的容量是
2
2
2,所以接下来的图就会是下面这个样子,红色边表示添加的反向边,这样一直找到再也没有
s
s
s到
t
t
t的简单路径,把每次减去的容量加在一起就是最大流
- 这种算法的时间复杂度是 O ( f × m ) O(f\times m) O(f×m), f f f表示最大网络流, m m m表示边数,因为采用 d f s dfs dfs进行搜索,可能会出现每次搜索只能增加 1 1 1的贡献,导致速度很慢
Edmonds–Karp算法
- E K EK EK算法是 F F FF FF思想的实现方式,它采用 b f s bfs bfs而非 d f s dfs dfs进行搜索,好处是不会陷入某条边的漩涡中,时间复杂度能达到 O ( m 2 n ) O(m^2n) O(m2n), m m m表示边数, n n n表示点数
https://www.luogu.com.cn/problem/P3376
#include <bits/stdc++.h>
using namespace std;
typedef long long ll;
int main(){
ios::sync_with_stdio(false);
cin.tie(0);
cout.tie(0);
int n, m, s, t;
cin >> n >> m >> s >> t;
vector<vector<ll> > g(n + 1, vector<ll>(n + 1));
for(int i=0;i<m;i++){
int u, v, w;
cin >> u >> v >> w;
g[u][v] += w;
}
vector<ll> flow(n + 1);
vector<int> pre(n + 1);
function<ll(int, int)> Bfs = [&](int s, int t){
queue<int> q;
fill(pre.begin(), pre.end(), -1);
q.push(s);
int ans = 0;
flow[s] = LONG_LONG_MAX;
pre[s] = 0;
while(!q.empty()){
int u = q.front();
q.pop();
for(int i=1;i<=n;i++){
if(pre[i] == -1 && g[u][i] != 0 && i != s){
q.push(i);
flow[i] = min(flow[u], g[u][i]);
pre[i] = u;
}
}
}
if(pre[t] == -1) return -1ll;
return flow[t];
};
function<ll(int, int)> maxFlow = [&](int s, int t){
ll ans = 0;
while(1){
ll flow = Bfs(s, t);
if(flow == -1ll) break;// 找不到增广路
int cur = t;
while(cur != s){
int fa = pre[cur];
g[fa][cur] -= flow;
g[cur][fa] += flow;
cur = fa;
}
ans += flow;
}
return ans;
};
cout << maxFlow(s, t) << '\n';
return 0;
}
Dinic
- 这个算法相对于之前的 E K EK EK算法改进点在于它使用了一个 O ( n 2 ) O(n^2) O(n2)构造的分层图,所谓分层就是按照它到源点的最短距离分成若干层,然后只能在层间转移而不能在层内转移
- 这种算法的时间复杂度在使用弧优化的前提下是 O ( n 2 m ) O(n^2m) O(n2m)的, D f s Dfs Dfs是 O ( m ) O(m) O(m), B f s Bfs Bfs是 O ( n 2 ) O(n^2) O(n2)
#include <bits/stdc++.h>
using namespace std;
typedef long long ll;
const int V = 1225;
const int E = 1e5 + 3e4;
struct Edge{
int nxt;
int to;
ll val;
}edge[E << 1];
int cnt = 2;
int head[V];
void Add_Edge(int u, int v, ll w){
edge[cnt].nxt = head[u];
edge[cnt].to = v;
edge[cnt].val = w;
head[u] = cnt++;
}
int dep[V];
int cur[V];
bool Bfs(int s, int t){
memset(dep, 0, sizeof dep);
queue<int> q;
q.push(s);
dep[s] = 1;
while(!q.empty()){
int u = q.front();
q.pop();
for(int i=head[u];i;i=edge[i].nxt){
int v = edge[i].to;
if(dep[v] == 0 && edge[i].val > 0){
dep[v] = dep[u] + 1;
q.push(v);
if(v == t) return true;
}
}
}
return false;
}
ll Dfs(int u, int t, ll mf){
if(u == t) return mf;
ll sum = 0;
for(int i=cur[u];i;i=edge[i].nxt){
cur[u] = i;// 当前弧优化
int v = edge[i].to;
if(dep[v] == dep[u] + 1 && edge[i].val > 0){
ll f = Dfs(v, t, min(mf, edge[i].val));
edge[i].val -= f;
edge[i ^ 1].val += f;// 更新残留网络
sum += f;
mf -= f;
if(mf == 0) break;// 余量为0
}
}
if(sum == 0) dep[u] = 0;// 如果走不到终点, 说明这个点没用了
return sum;
}
ll Dinic(int s, int t){
ll flow = 0;
while(Bfs(s, t)){
memcpy(cur, head, sizeof head);
flow += Dfs(s, t, INT_MAX);
}
return flow;
}
int main(){
ios::sync_with_stdio(false);
cin.tie(0);
cout.tie(0);
int n, m, s, t;
cin >> n >> m >> s >> t;
for(int i=0;i<m;i++){
int u, v;
ll w;
cin >> u >> v >> w;
Add_Edge(u, v, w);
Add_Edge(v, u, 0ll);
}
cout << Dinic(s, t);
return 0;
}
还有一种算法是 I S A P ISAP ISAP,复杂度是 O ( n m 2 ) O(nm^2) O(nm2),以后有时间再看吧