一.串口轮询模式底层机制:
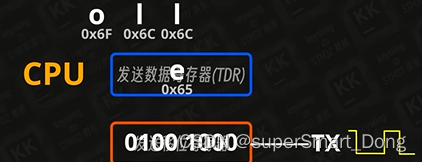
在STM32每个串口的内部都有两个寄存器:发送数据寄存器(TDR)/发送移位寄存器,当我们调用HAL_UART_Transmit 把数据发送出去时,CPU会将数据依次将数据发送到数据寄存器中,移位寄存器中的数据会根据我们设置的比特率传化成高低电平从TX引脚输出。待发送移位寄存器中发数据发送出去后,CPU就会将下一个数据进行相同的发送。
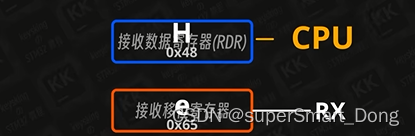
当我们调用HAL_UART_Receive把数据接收过来时,数据会通过RX引脚收到的电平信号进行转化后,会将数据存进接收移位寄存器。接收移位寄存器每接收完1帧就会将数据放到接收数据寄存器。而后CPU会将接收数据寄存器中的数据存到变量中
而在轮询模式下。在发送整个数据的过程中,CPU都要不断地轮询“发送数据寄存器”中的数据是否移动到“发送移位寄存器”下,直到把本次要发送的数据全部发完,或者用时超过设置的超时时间才算结束。
因此,采用轮询模式,在数据接收和发送过程中,CPU不会去做其他事情,主程序中的代码会进行阻塞直到IO结束。
具体的案例在下面链接:
STM32:TTL串口调试-CSDN博客
二.串口的中断模式
(1).中断模式机制
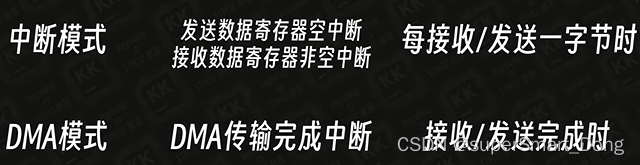
采用中断模式便可以解决在IO过程中主程序阻塞问题。原理是接收和发送数据时,CPU并不会轮询发送/接收数据寄存器是否有数据。而是发送/接收数据寄存器当每数据时会发送一个中断主动通知CPU。因此CPU在将数据寄存器中的数据移动到移位寄存器后,就可以去执行其他任务了。当发送移位寄存器中的数据发送出去后就会触发“发送移位寄存器空”中断再把CPU叫回来。如此反复完成IO。
(2).中断模式案例
在STM32:TTL串口调试-CSDN博客这个案例下,改造成中断函数形式。
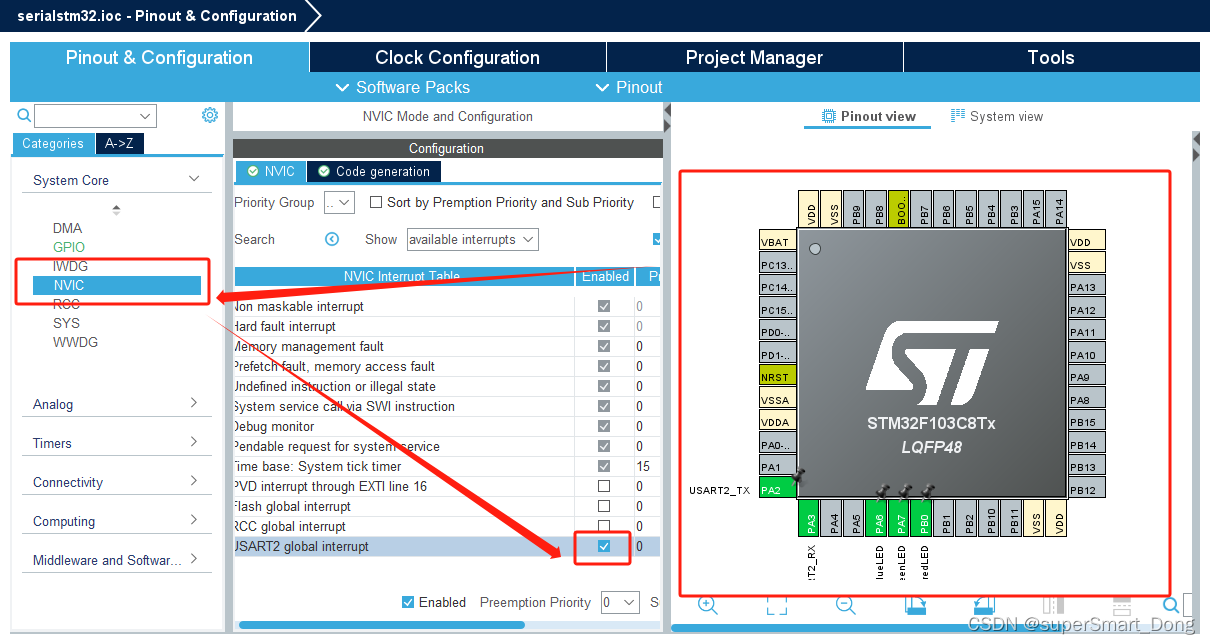
1. 打开CubeIDE,开启USART2中断,生成代码
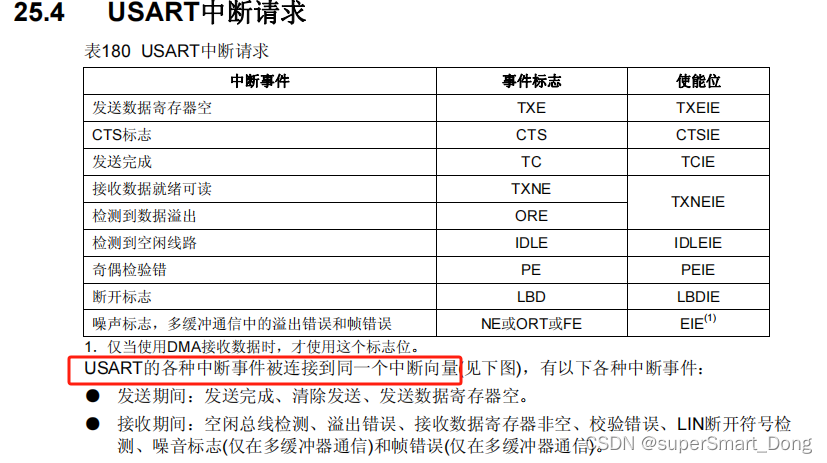
2.查看stm32f1xx_it文件中 USART2_IRQHandler() 中断处理函数的定义。由于每个USART中只有一个中断向量,并且这个中断向量是USART中断请求共用的,所以中断处理函数也是被USART共用的。因此,为了单独写发送数据的逻辑写在中断处理函数中就不太合适。因此需要判断哪些原因触发了这个中断处理函数,分别实现逻辑,而这个判断HAL_UART_IRQHandler(&huart2) 函数中已经帮我们准备好了。
转到HAL_UART_IRQHandler(&huart2)的定义。可以看见经过一系列判断等逻辑后就会根据判断的结果执行Callback函数。因此当某个事件发生时,就会调用回调函数。而数据接收完成后执行的回调函数就是:
__weak void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
注:Cplt 指 完成 。 __weak 关键字作为前缀代表是一个弱定义,我们可以在其他地方重新定义此函数
因此我们可以实现这个回调函数来实现传输数据又不阻塞主程序。
(3).示例代码
main.c关键代码如下:
注: HAL_UART_Receive_IT(&huart2, &message, size);
HAL_UART_Transmit_IT(&huart2,&message, size);是中断形式的UART接收/发送数据的函数,由于不阻塞主程序因此不需要设置超时时间。
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include <string.h>
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
UART_HandleTypeDef huart2;
uint8_t recvDate[2];
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_USART2_UART_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart){
// HAL_UART_Receive(huart, pData, Size, Timeout)
// HAL_UART_Receive(&huart2, recvDate, 2, HAL_MAX_DELAY);
HAL_UART_Transmit_IT(&huart2,recvDate,2);
GPIO_PinState pinstate= GPIO_PIN_RESET;
if(recvDate[1] == '1'){
pinstate = GPIO_PIN_SET;
}
if(recvDate[0] == 'R'){
HAL_GPIO_WritePin(redLED_GPIO_Port, redLED_Pin, pinstate);
}else if(recvDate[0] == 'B'){
HAL_GPIO_WritePin(blueLED_GPIO_Port,blueLED_Pin, pinstate);
}else if(recvDate[0] == 'G'){
HAL_GPIO_WritePin(greenLED_GPIO_Port,greenLED_Pin, pinstate);
}
HAL_UART_Receive_IT(&huart2, recvDate, 2);
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART2_UART_Init();
/* USER CODE BEGIN 2 */
HAL_UART_Receive_IT(&huart2, recvDate, 2);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
...
三.DMA 模式
虽然采用中断模式便可以解决在IO过程中主程序阻塞问题,但是CPU切换过于频繁。而直接内存访问(DMA,Direct Memory Access)是一些计算机总线架构提供的功能,它能使数据从附加设备(如磁盘驱动器)直接发送到计算机主板的内存上。
CPU和寄存器就像老师与学生。轮询模式就像老师每讲完一段知识点,老师都会不断地问学生学好了没,直到学会才会讲下一个知识点。中断模式就像老师每讲完一段知识点后就开始干自己的事,等待学生举手示意自己学习完后才开始讲下一个知识点。而DMA就像一名助教,负责提前学习老师要讲给学生的知识,助教再将所学知识讲给学生。直到学生把助教所学的知识都学完后,助教再让教师再传授一部分知识。
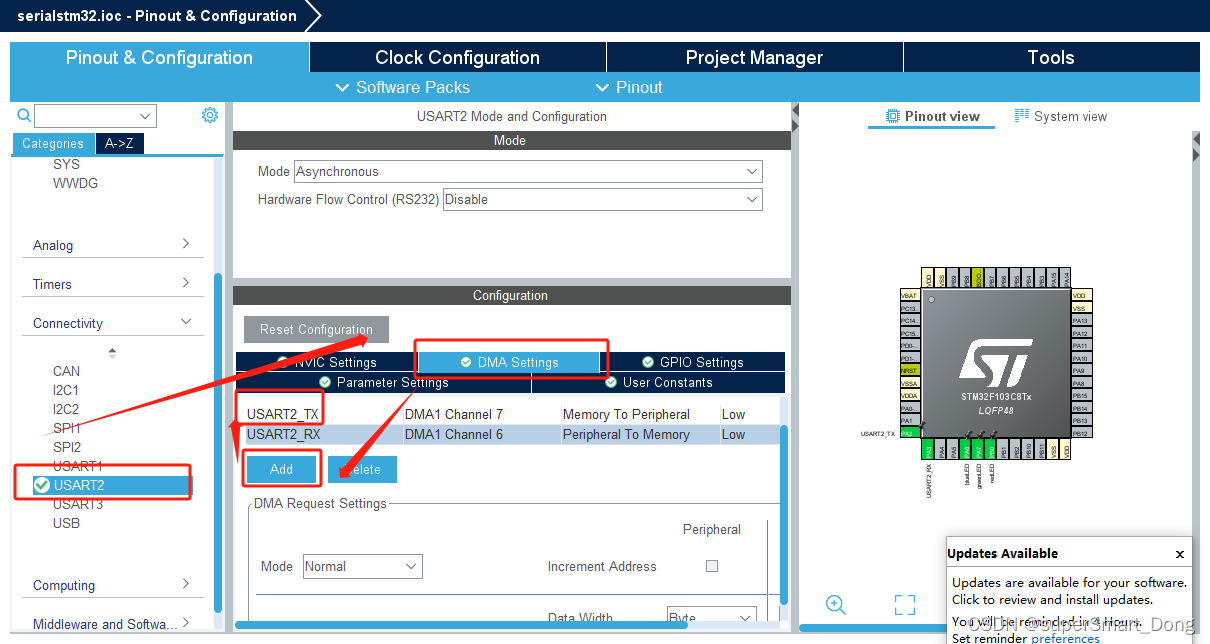
再CubeIDE设计界面中,connective ->USART2-> DMA Settings 可以配置DMA通道(如下图).
想要发送数据(TX),即内存向外设传输数据,默认通道为Channal7,而接收为Channal6。目前采用默认配置就行。
配置完后,传输和发送数据的函数就变成了
注: HAL_UART_Receive_DMA(&huart2, &message, size);
HAL_UART_Transmit_DMA(&huart2,&message, size);
当然,还可以利用中断来通知CPU传输/发送数据,只不过就不是原先的串口中断,而是DMA传输完成中断了。
四.接收不定长数据
(1) 接收不定长数据的原理
接收不定长数据主要关心的是"串口空闲(Idle)中断",即接收串口(RX引脚)上无后续数据进入便会触发。通常这个场景代表一帧数据包接收完成。
而数据接收关键函数就变成了:
HAL_UARTEx_ReceiveToIdle(&huart2, pData, Size, RxLen, Timeout)
//size为允许装入的最大数据长度。
HAL_UARTEx_ReceiveToIdle_IT(&huart2, &message,maxsize);
HAL_UARTEx_ReceiveToIdle_DMA(&huart2, &message, maxsize);
回调函数就变成了
// Size参数传入数值为本次接收的数据长度
__weak void HAL_UARTEx_RxEventCallback(UART_HandleTypeDef *huart, uint16_t Size)
对于该回调函数,除了"串口空闲中断"会调用以外,DMA传输过半中断也会调用。因此需要根据业务要求决定无关中断是否要屏蔽。
(2).采用DMA方式接收不定长数据的示例代码
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
uint8_t recvDate[20];
/* Private variables ---------------------------------------------------------*/
UART_HandleTypeDef huart2;
DMA_HandleTypeDef hdma_usart2_tx;
DMA_HandleTypeDef hdma_usart2_rx;
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_DMA_Init(void);
static void MX_USART2_UART_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
void HAL_UARTEx_RxEventCallback(UART_HandleTypeDef *huart, uint16_t Size){
if(huart == &huart2){
//把接收到的数据,发给终端进行打印
HAL_UART_Transmit_DMA(&huart2,recvDate,Size);
GPIO_PinState pinstate= GPIO_PIN_RESET;
if(recvDate[1] == '1'){
pinstate = GPIO_PIN_SET;
}
if(recvDate[0] == 'R'){
HAL_GPIO_WritePin(redLED_GPIO_Port, redLED_Pin, pinstate);
}else if(recvDate[0] == 'B'){
HAL_GPIO_WritePin(blueLED_GPIO_Port,blueLED_Pin, pinstate);
}else if(recvDate[0] == 'G'){
HAL_GPIO_WritePin(greenLED_GPIO_Port,greenLED_Pin, pinstate);
}
//继续接收即将要接收的数据
HAL_UARTEx_ReceiveToIdle_DMA(&huart2, recvDate, sizeof(recvDate));
//关闭DMA传输过半中断
__HAL_DMA_DISABLE_IT(&hdma_usart2_rx,DMA_IT_HT);
}
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_DMA_Init();
MX_USART2_UART_Init();
/* USER CODE BEGIN 2 */
//接收数据,并屏蔽DMA传输过半中断
HAL_UARTEx_ReceiveToIdle_DMA(&huart2, recvDate, sizeof(recvDate));
__HAL_DMA_DISABLE_IT(&hdma_usart2_rx,DMA_IT_HT);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}