文章目录
- 1. 路径规划算法总体介绍
- 1.1 Task: LANE_CHANGE_DECIDER
- 1.2 Task: PATH_REUSE_DECIDER
- 1.3 Task: PATH_BORROW_DECIDER
- 1.4 Task: PATH_BOUNDS_DECIDER
- 1.5 Task: PIECEWISE_JERK_PATH_OPTIMIZER
- 1.6 Task: PATH_ASSESSMENT_DECIDER
- 1.7 Task: PATH_DECIDER
- 2. 基于二次规划的路径规划算法
- 2.1 二次规划问题标准型
- 2.2 定义优化变量
- 2.3 设计目标函数
- 2.4 设计约束
- 2.5 求解器求解
- 2.5.1 设定OSQP求解参数
- 2.5.2 计算QP系数矩阵
- 2.5.3 构造OSQP求解器
- 2.5.4 获取优化结果
- 3. 路径规划算法代码解读
- 3.1 总流程和决策\优化的入口函数
- 3.2 产生换道决策
- 3.3 产生借道决策
- 3.4 产生路径边界
- 3.5 路径优化
- 3.6 选择最优路径
- 4. 路径规划算法实践
- 4.1 观察借道绕行、自车道绕行障碍物、自车道巡航、换道时路径的边界和规划的路径
- 4.2 借道绕行场景,调整 l , l ’ , l ’’ l,l’,l’’ l,l’,l’’的权重系数,观察路径的变化
- 4.3 靠边停车实践,开启靠边停车功能,观察路径的变化
1. 路径规划算法总体介绍
Apollo中对路径规划解耦,分为路径规划与速度规划两部分。并将规划分为决策与优化两个部分。
• 路径规划 —— 静态环境(道路,静止/低速障碍物)
• 速度规划 —— 动态环境(中/高速障碍物)

路径规划的配置文件在lane_follow_config.pb.txt中
// /home/yuan/apollo-edu/modules/planning/conf/scenario/lane_follow_config.pb.txt
scenario_type: LANE_FOLLOW
stage_type: LANE_FOLLOW_DEFAULT_STAGE
stage_config: {
//路径规划
stage_type: LANE_FOLLOW_DEFAULT_STAGE
enabled: true
task_type: LANE_CHANGE_DECIDER
task_type: PATH_REUSE_DECIDER
task_type: PATH_LANE_BORROW_DECIDER
task_type: PATH_BOUNDS_DECIDER
task_type: PIECEWISE_JERK_PATH_OPTIMIZER
//速度规划
task_type: PATH_ASSESSMENT_DECIDER
task_type: PATH_DECIDER
task_type: RULE_BASED_STOP_DECIDER
task_type: SPEED_BOUNDS_PRIORI_DECIDER
task_type: SPEED_HEURISTIC_OPTIMIZER
task_type: SPEED_DECIDER
task_type: SPEED_BOUNDS_FINAL_DECIDER
task_type: PIECEWISE_JERK_SPEED_OPTIMIZER
# task_type: PIECEWISE_JERK_NONLINEAR_SPEED_OPTIMIZER
task_type: RSS_DECIDER
_DECIDER结尾的为决策部分 _OPTIMIZER结尾的为优化部分。
1.1 Task: LANE_CHANGE_DECIDER
产生是否换道的决策,更新换道状态

首先判断是否产生多条参考线,若只有一条参考线,则保持直行。若有多条参考线,则根据一些条件(主车的前方和后方一定距离内是否有障碍物,旁边车道在一定距离内是否有障碍物)进行判断是否换道,当所有条件都满足时,则进行换道决策。
1.2 Task: PATH_REUSE_DECIDER
路径是否可重用,提高帧间平顺性
 主要判断是否可以重用上一帧规划的路径。若上一帧的路径未与障碍物发生碰撞,则可以重用,提高稳定性,节省计算量。若上一帧的规划出的路径发生碰撞,则重新规划路径。
主要判断是否可以重用上一帧规划的路径。若上一帧的路径未与障碍物发生碰撞,则可以重用,提高稳定性,节省计算量。若上一帧的规划出的路径发生碰撞,则重新规划路径。
1.3 Task: PATH_BORROW_DECIDER
产生是否借道的决策

该决策有以下的判断条件:
• 是否只有一条车道
• 是否存在阻塞道路的障碍物
• 阻塞障碍物是否远离路口
• 阻塞障碍物长期存在
• 旁边车道是实线还是虚线
当所有判断条件都满足时,会产生借道决策。
1.4 Task: PATH_BOUNDS_DECIDER
产生路径边界
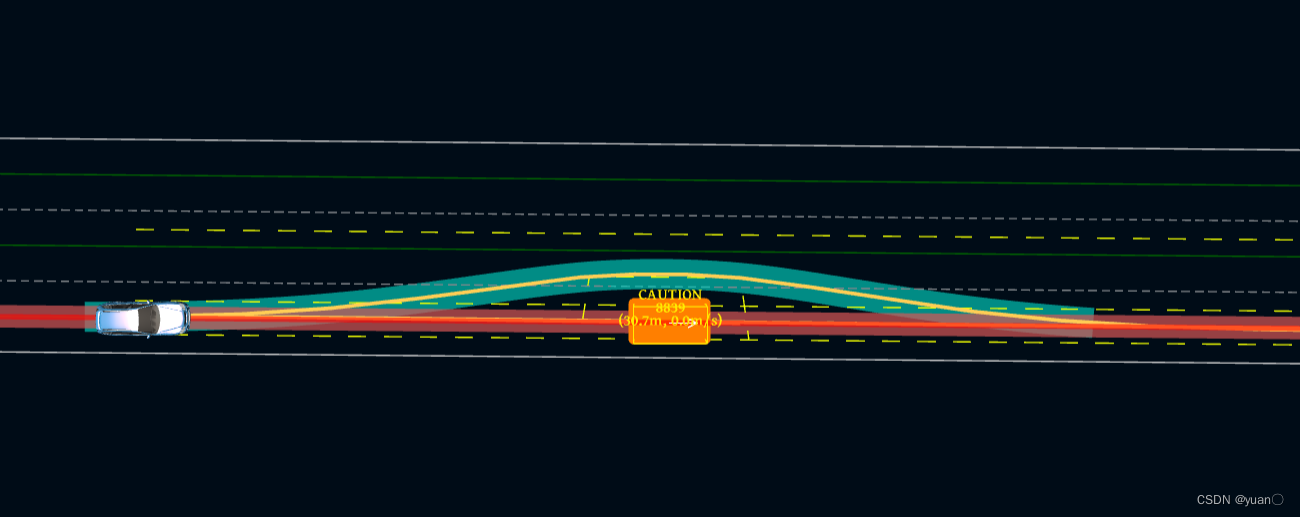
 利用前几个决策器,根据相应条件,产生相应的SL边界。这里说明以下Nudge障碍物的概念——主车旁边的障碍物未完全阻挡主车,主车可以通过绕行避过障碍物(注意图中的边界)。
利用前几个决策器,根据相应条件,产生相应的SL边界。这里说明以下Nudge障碍物的概念——主车旁边的障碍物未完全阻挡主车,主车可以通过绕行避过障碍物(注意图中的边界)。
1.5 Task: PIECEWISE_JERK_PATH_OPTIMIZER
基于二次规划算法,对每个边界规划出最优路径.

1.6 Task: PATH_ASSESSMENT_DECIDER
路径评价,选出最优路径
依据以下规则,进行评价。
路径是否和障碍物碰撞
路径长度
路径是否会停在对向车道
路径离自车远近
哪个路径更早回自车道
…
 路径两两进行对比,选出最优的路径。
路径两两进行对比,选出最优的路径。
1.7 Task: PATH_DECIDER
根据选出的路径给出对障碍物的决策
 若是绕行的路径,则产生绕行的决策;若前方有障碍物阻塞,则产生停止的决策。
若是绕行的路径,则产生绕行的决策;若前方有障碍物阻塞,则产生停止的决策。
2. 基于二次规划的路径规划算法
2.1 二次规划问题标准型
牛津大学推出过二次规划的求解器,支持C/C++、python、Matlab等多种语言。
二次规划问题的标准形式为:
m
i
n
i
m
i
z
e
1
2
x
T
P
x
+
q
T
x
s
u
b
j
e
c
t
t
o
l
≤
A
x
≤
u
\begin{array}{lllllllllllllll}{{\rm{minimize}}}&{\frac{1}{2}{x^T}Px + {q^T}x}\\{{\rm{subject to}}}&{l \le Ax \le u}\end{array}
minimizesubjectto21xTPx+qTxl≤Ax≤u where
x
∈
R
n
x \in {{\bf{R}}^n}
x∈Rn is the optimization variable. The objective function is defined by a positive semidefinite matrix
P
∈
S
+
n
P \in {\bf{S}}_ + ^n
P∈S+nand vector
q
∈
R
n
q \in {{\bf{R}}^n}
q∈Rn . The linear constraints are defined by matrix
A
∈
R
m
×
n
A \in {{\bf{R}}^{m \times n}}
A∈Rm×n and vectors
l
l
l and
u
u
u so that
l
i
∈
R
∪
{
−
∞
}
{l_i} \in {\bf{R}} \cup \{ - \infty \}
li∈R∪{−∞} and
‘
u
i
∈
R
∪
{
+
∞
}
{`u_i} \in {\bf{R}} \cup \{ + \infty \}
‘ui∈R∪{+∞} for all
i
∈
{
1
,
…
,
m
}
i \in \{ 1, \ldots ,m{\rm{\} }}
i∈{1,…,m} .
二次规划优化问题为二次型,其约束为线性型。
x
x
x是要优化的变量,是一个
n
n
n维的向量。
p
p
p是二次项系数,是正定矩阵。
q
q
q是一次项系数,是
n
n
n维向量。
A
A
A是一个
m
m
mx
n
n
n的矩阵,
A
A
A为约束函数的一次项系数,
m
m
m为约束函数的个数。
l
l
l和
u
u
u分别为约束函数的下边界和上边界。
常用二次规划求解器:
- OSQP :使用ADMM方法求解。 对于规模大的,含有大量等式或不等式约束的问题有较好的求解效率。
- qpOASES: 用可行域法,对于约束较少的小规模问题,qpOASES求解更快。
二次规划问题的求解往往有以下几个步骤:定义目优化变量、设计目标函数、设计约束、求解器求解等几个步骤。
2.2 定义优化变量
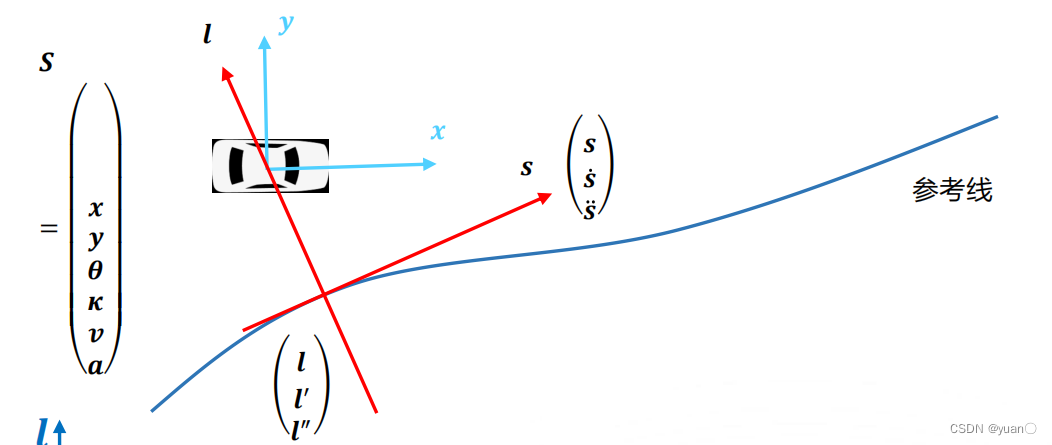 路径规划一般是在Frenet坐标系中进行的。
s
s
s为沿着参考线的方向,
l
l
l为垂直于坐标系的方向。
路径规划一般是在Frenet坐标系中进行的。
s
s
s为沿着参考线的方向,
l
l
l为垂直于坐标系的方向。 如图所示,将障碍物分别投影到SL坐标系上。在
s
s
s方向上,以间隔
Δ
s
\Delta s
Δs作为一个间隔点,从
s
0
s_0
s0,
s
1
s_1
s1,
s
2
s_2
s2一直到
s
n
−
1
s_{n-1}
sn−1,构成了规划的路径。选取每个间隔点的
l
l
l作为优化的变量,同时也将
l
˙
\dot l
l˙和
l
¨
\ddot l
l¨也作为优化变量。
如图所示,将障碍物分别投影到SL坐标系上。在
s
s
s方向上,以间隔
Δ
s
\Delta s
Δs作为一个间隔点,从
s
0
s_0
s0,
s
1
s_1
s1,
s
2
s_2
s2一直到
s
n
−
1
s_{n-1}
sn−1,构成了规划的路径。选取每个间隔点的
l
l
l作为优化的变量,同时也将
l
˙
\dot l
l˙和
l
¨
\ddot l
l¨也作为优化变量。
 如此,就构成了优化变量
x
x
x,
x
x
x有三个部分组成:从
l
0
l_0
l0,
l
1
l_1
l1,
l
2
l_2
l2到
l
n
−
1
l_{n-1}
ln−1,从
l
˙
0
\dot l_0
l˙0,
l
˙
1
\dot l_1
l˙1,
l
˙
2
\dot l_2
l˙2到
l
˙
n
−
1
\dot l_{n-1}
l˙n−1,从
l
¨
0
\ddot l_0
l¨0,
l
¨
1
\ddot l_1
l¨1,
l
¨
2
\ddot l_2
l¨2到
l
¨
n
−
1
\ddot l_{n-1}
l¨n−1.
如此,就构成了优化变量
x
x
x,
x
x
x有三个部分组成:从
l
0
l_0
l0,
l
1
l_1
l1,
l
2
l_2
l2到
l
n
−
1
l_{n-1}
ln−1,从
l
˙
0
\dot l_0
l˙0,
l
˙
1
\dot l_1
l˙1,
l
˙
2
\dot l_2
l˙2到
l
˙
n
−
1
\dot l_{n-1}
l˙n−1,从
l
¨
0
\ddot l_0
l¨0,
l
¨
1
\ddot l_1
l¨1,
l
¨
2
\ddot l_2
l¨2到
l
¨
n
−
1
\ddot l_{n-1}
l¨n−1.
2.3 设计目标函数
对于目标函数的设计,我们需要明确以下目标:
- 确保安全、礼貌的驾驶,尽可能贴近车道中心线行驶: ∣ l i ∣ ↓ \left| {{l_i}} \right| \downarrow ∣li∣↓
- 确保舒适的体感,尽可能降低横向速度/加速度/加加速度: ∣ l ˙ i ∣ ↓ \left| {{{\dot l}_i}} \right| \downarrow l˙i ↓, ∣ l ¨ i ∣ ↓ \left| {{{\ddot l}_i}} \right| \downarrow l¨i ↓, ∣ l ′ ′ ′ i → i + 1 ∣ ↓ \left| {{{l'''}_{i \to i + 1}}} \right| \downarrow ∣l′′′i→i+1∣↓
- 确保终点接近参考终点(这个往往用在靠边停车场景之中国): l e n d = l r e f {l_{end}} = {l_{ref}} lend=lref
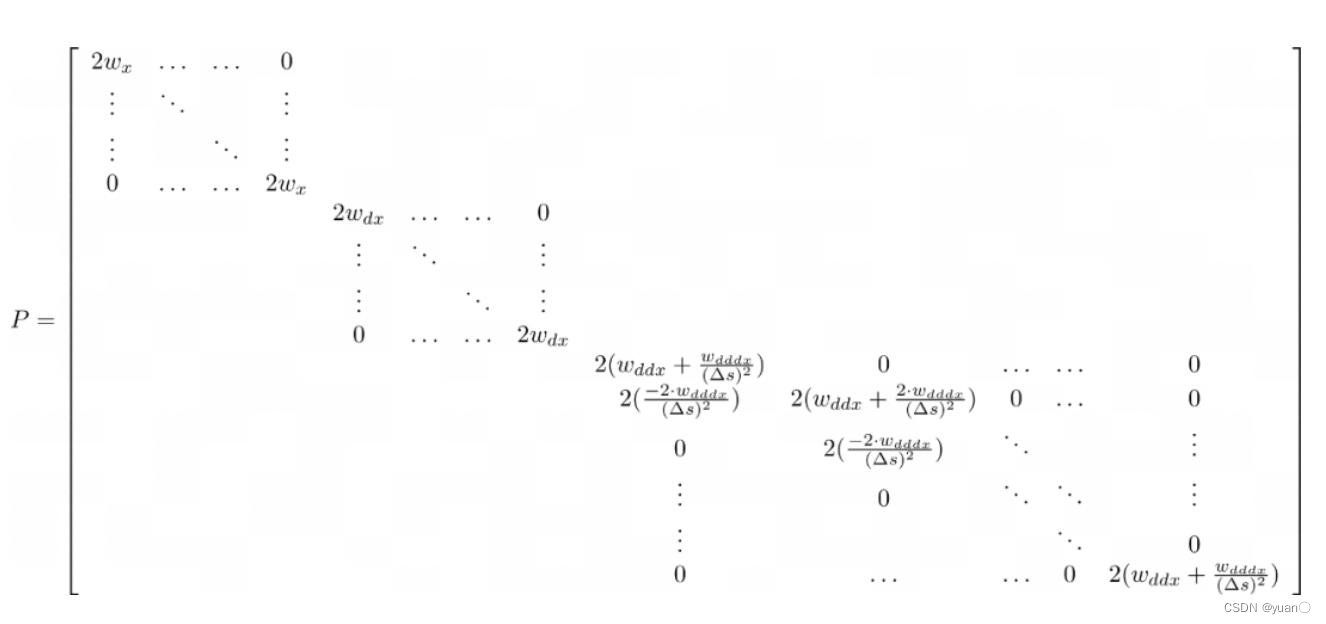
最后会得到以下目标函数:
 对每个点设计二次的目标函数并对代价值进行求和,式中的
w
l
,
w
d
l
,
w
d
d
l
,
w
d
d
d
l
{w_l},{w_{dl}},{w_{ddl}},{w_{dddl}}
wl,wdl,wddl,wdddl都是对于优化变量的惩罚项,以及偏移终点的惩罚项
w
e
n
d
−
l
,
w
e
n
d
−
d
l
,
w
e
n
d
−
d
d
l
,
w
e
n
d
−
d
d
d
l
{w_{end - l}},{w_{end - dl}},{w_{end - ddl}},{w_{end - dddl}}
wend−l,wend−dl,wend−ddl,wend−dddl。
对每个点设计二次的目标函数并对代价值进行求和,式中的
w
l
,
w
d
l
,
w
d
d
l
,
w
d
d
d
l
{w_l},{w_{dl}},{w_{ddl}},{w_{dddl}}
wl,wdl,wddl,wdddl都是对于优化变量的惩罚项,以及偏移终点的惩罚项
w
e
n
d
−
l
,
w
e
n
d
−
d
l
,
w
e
n
d
−
d
d
l
,
w
e
n
d
−
d
d
d
l
{w_{end - l}},{w_{end - dl}},{w_{end - ddl}},{w_{end - dddl}}
wend−l,wend−dl,wend−ddl,wend−dddl。
ps:三阶导的求解方式为:
l
′
′
i
+
1
−
l
′
′
i
Δ
s
\frac{{{{l''}_{i + 1}} - {{l''}_i}}}{{\Delta s}}
Δsl′′i+1−l′′i
按照二次型的标准型,将目标函数的二次项系数和一次项系数用矩阵表示:
m
i
n
i
m
i
z
e
1
2
x
T
P
x
+
q
T
x
s
u
b
j
e
c
t
t
o
l
≤
A
x
≤
u
\begin{array}{lllllllllllllll}{{\rm{minimize}}}&{\frac{1}{2}{x^T}Px + {q^T}x}\\{{\rm{subject to}}}&{l \le Ax \le u}\end{array}
minimizesubjectto21xTPx+qTxl≤Ax≤u
2.4 设计约束
接下来谈谈约束的设计。
约束要满足:
• 主车必须在道路边界内,同时不能和障碍物有碰撞
l
i
∈
(
l
min
i
,
l
max
i
)
{l_i} \in (l_{\min }^i,l_{\max }^i)
li∈(lmini,lmaxi) 边界的约束已经在1.4 Task: PATH_BOUNDS_DECIDER里讲述过了。
• 根据当前状态,主车的横向速度/加速度/加加速度有特定运动学限制:
首先是曲率的约束,车辆在行驶时有最大曲率半径的限制,根据Frenet坐标的转换公式(该公式来源于这篇论文——Werling M, Ziegler J, Kammel S, et al. Optimal trajectory generation for dynamic street scenarios in a frenet frame[C]//2010 IEEE International Conference on Robotics and Automation. IEEE, 2010: 987-993.): l
l
l的二阶导于曲率有如上关系,但我们无法直接将其应用于约束的设计(约束函数为一次)之中,对此需要对其进行简化。
l
l
l的二阶导于曲率有如上关系,但我们无法直接将其应用于约束的设计(约束函数为一次)之中,对此需要对其进行简化。
假设1:参考线规划:
θ
−
θ
r
e
f
=
Δ
θ
≈
0
\theta - {\theta _{ref}} = \Delta \theta \approx 0
θ−θref=Δθ≈0,即航向角几乎为0.
假设2:规划的曲率数值上很小,所以两个曲率相乘近乎为0.
0
<
κ
r
e
f
<
κ
≪
1
→
κ
r
e
f
κ
≈
0
0{\rm{ }} < {\kappa _{ref}} < \kappa \ll 1 \to {\kappa _{ref}}\kappa {\rm{ }} \approx {\rm{ }}0
0<κref<κ≪1→κrefκ≈0 依据上述假设,我们将上述关系简化为:
d
2
l
d
s
2
=
κ
−
κ
r
e
f
\frac{{{d^2}l}}{{d{s^2}}} = \kappa - {\kappa _{ref}}
ds2d2l=κ−κref 根据车辆运动学关系计算最大曲率:
κ
max
=
tan
(
α
max
)
L
{\kappa _{\max }} = \frac{{\tan ({\alpha _{\max }})}}{L}
κmax=Ltan(αmax) 得到
l
¨
\ddot l
l¨的约束范围:
−
κ
max
−
κ
r
e
f
<
l
¨
i
<
κ
max
−
κ
r
e
f
- {\kappa _{\max }} - {\kappa _{ref}} < {\ddot l_i} < {\kappa _{\max }} - {\kappa _{ref}}
−κmax−κref<l¨i<κmax−κref 另外还得满足曲率变化率的要求(即规划处的路径能使方向盘在最大角速度下能够及时的转过来):
d
3
l
d
s
3
=
d
d
2
t
d
l
2
d
t
⋅
d
t
d
s
\frac{{{d^3}l}}{{d{s^3}}} = \frac{{d\frac{{{d^2}t}}{{d{l^2}}}}}{{dt}} \cdot \frac{{dt}}{{ds}}
ds3d3l=dtddl2d2t⋅dsdt 主路行驶中,实际车轮转角很小
α
→
0
α→0
α→0,近似有
t
a
n
α
≈
α
tan α ≈ α
tanα≈α,从而有:
d
2
l
d
s
2
≈
κ
−
κ
r
e
f
=
tan
(
α
max
)
L
−
κ
r
e
f
≈
α
L
−
κ
r
e
f
\frac{{{d^2}l}}{{d{s^2}}} \approx \kappa - {\kappa _{ref}} = \frac{{\tan ({\alpha _{\max }})}}{L} - {\kappa _{ref}} \approx \frac{\alpha }{L} - {\kappa _{ref}}
ds2d2l≈κ−κref=Ltan(αmax)−κref≈Lα−κref 同时假设,在一个周期内规划的路径上车辆的速度是恒定的
v
=
d
t
d
s
v = \frac{{dt}}{{ds}}
v=dsdt 代入三阶导公式得到三阶导的边界
d
3
l
d
s
3
=
α
′
L
v
<
α
′
max
L
v
\frac{{{d^3}l}}{{d{s^3}}} = \frac{{\alpha '}}{{Lv}} < \frac{{{{\alpha '}_{\max }}}}{{Lv}}
ds3d3l=Lvα′<Lvα′max
总结
- 必须在道路边界内,同时不能和障碍物有碰撞 l i ∈ ( l min i , l max i ) {l_i} \in (l_{\min }^i,l_{\max }^i) li∈(lmini,lmaxi)
- 根据当前状态,主车的横向速度/加速度/加加速度有特定运动学限制:
![]()
- 必须满足基本的物理原理:
 三阶导
l
′
′
′
{l'''}
l′′′可以积成二阶导
l
′
′
{l''}
l′′,二阶导
l
′
′
{l''}
l′′可以积成一阶导
l
′
{l'}
l′,一阶导
l
′
{l'}
l′可以积成
l
l
l。三阶导
l
′
′
′
{l'''}
l′′′为常量,二阶导
l
′
′
{l''}
l′′,一阶导
l
′
{l'}
l′,
l
l
l为连续可导的。每个点之间都是三界多项的关系。
三阶导
l
′
′
′
{l'''}
l′′′可以积成二阶导
l
′
′
{l''}
l′′,二阶导
l
′
′
{l''}
l′′可以积成一阶导
l
′
{l'}
l′,一阶导
l
′
{l'}
l′可以积成
l
l
l。三阶导
l
′
′
′
{l'''}
l′′′为常量,二阶导
l
′
′
{l''}
l′′,一阶导
l
′
{l'}
l′,
l
l
l为连续可导的。每个点之间都是三界多项的关系。
将上述内容转化为约束矩阵。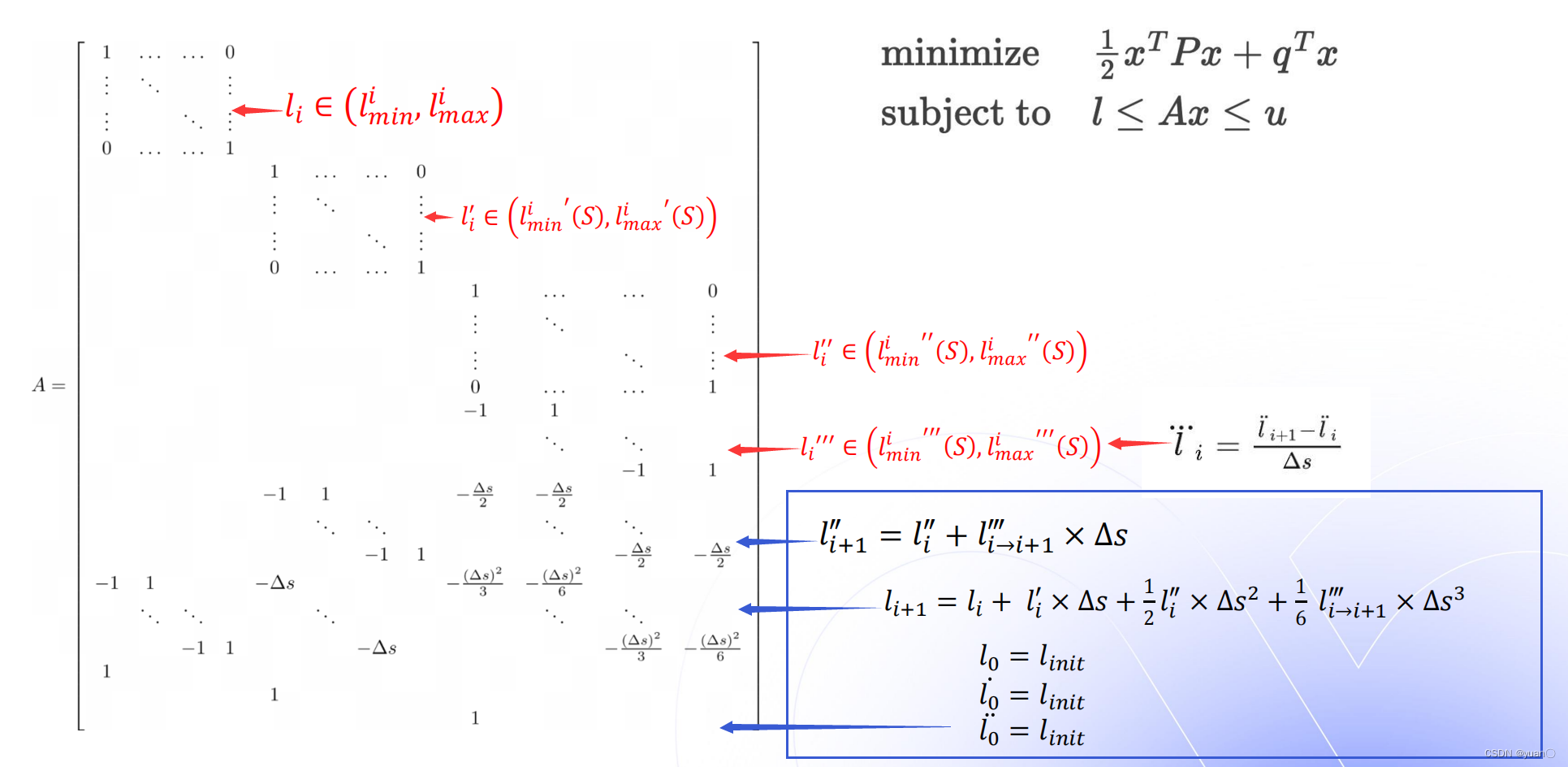 l
0
=
l
i
n
i
t
l_0=l_{init}
l0=linit,
l
˙
0
=
l
i
n
i
t
\dot l_0=l_{init}
l˙0=linit,
l
¨
0
=
l
i
n
i
t
\ddot l_0=l_{init}
l¨0=linit满足的是起点的约束,即为实际车辆规划起点的状态。
l
0
=
l
i
n
i
t
l_0=l_{init}
l0=linit,
l
˙
0
=
l
i
n
i
t
\dot l_0=l_{init}
l˙0=linit,
l
¨
0
=
l
i
n
i
t
\ddot l_0=l_{init}
l¨0=linit满足的是起点的约束,即为实际车辆规划起点的状态。
2.5 求解器求解
最后是运用求解器进行求解。求解器求解同样需要四个步骤:设定OSQP求解参数、计算QP系数矩阵、构造OSQP求解器、获取优化结果。
2.5.1 设定OSQP求解参数
// /home/yuan/apollo-edu/modules/planning/math/piecewise_jerk/piecewise_jerk_speed_problem.cc
OSQPSettings* PiecewiseJerkSpeedProblem::SolverDefaultSettings() {
// Define Solver default settings
OSQPSettings* settings =
reinterpret_cast<OSQPSettings*>(c_malloc(sizeof(OSQPSettings)));
osqp_set_default_settings(settings);
settings->eps_abs = 1e-4;
settings->eps_rel = 1e-4;
settings->eps_prim_inf = 1e-5;
settings->eps_dual_inf = 1e-5;
settings->polish = true;
settings->verbose = FLAGS_enable_osqp_debug;
settings->scaled_termination = true;
return settings;
}
2.5.2 计算QP系数矩阵
// /home/yuan/apollo-edu/modules/planning/math/piecewise_jerk/piecewise_jerk_problem.cc
OSQPData* PiecewiseJerkProblem::FormulateProblem() {
// calculate kernel
std::vector<c_float> P_data;
std::vector<c_int> P_indices;
std::vector<c_int> P_indptr;
CalculateKernel(&P_data, &P_indices, &P_indptr); // 二次项系数P的矩阵
// calculate affine constraints
std::vector<c_float> A_data;
std::vector<c_int> A_indices;
std::vector<c_int> A_indptr;
std::vector<c_float> lower_bounds;
std::vector<c_float> upper_bounds;
CalculateAffineConstraint(&A_data, &A_indices, &A_indptr, &lower_bounds,
&upper_bounds); // 约束项系数A的矩阵
// calculate offset
std::vector<c_float> q;
CalculateOffset(&q); // 一次项系数q的向量
OSQPData* data = reinterpret_cast<OSQPData*>(c_malloc(sizeof(OSQPData)));
CHECK_EQ(lower_bounds.size(), upper_bounds.size());
size_t kernel_dim = 3 * num_of_knots_;
size_t num_affine_constraint = lower_bounds.size();
data->n = kernel_dim;
data->m = num_affine_constraint;
data->P = csc_matrix(kernel_dim, kernel_dim, P_data.size(), CopyData(P_data),
CopyData(P_indices), CopyData(P_indptr));
data->q = CopyData(q);
data->A =
csc_matrix(num_affine_constraint, kernel_dim, A_data.size(),
CopyData(A_data), CopyData(A_indices), CopyData(A_indptr));
data->l = CopyData(lower_bounds);
data->u = CopyData(upper_bounds);
return data;
}
2.5.3 构造OSQP求解器
OSQPWorkspace* osqp_work = nullptr;
osqp_work = osqp_setup(data, settings);
2.5.4 获取优化结果
osqp_solve(osqp_work);
auto status = osqp_work->info->status_val;// 获取优化值
if (status < 0 || (status != 1 && status != 2)) {
AERROR << "failed optimization status:\t" << osqp_work->info->status;
osqp_cleanup(osqp_work);
FreeData(data);
c_free(settings);
return false;
} else if (osqp_work->solution == nullptr) {
AERROR << "The solution from OSQP is nullptr";
osqp_cleanup(osqp_work);
FreeData(data);
c_free(settings);
return false;
}
// extract primal results
x_.resize(num_of_knots_);
dx_.resize(num_of_knots_);
ddx_.resize(num_of_knots_);
for (size_t i = 0; i < num_of_knots_; ++i) {
x_.at(i) = osqp_work->solution->x[i] / scale_factor_[0];
dx_.at(i) = osqp_work->solution->x[i + num_of_knots_] / scale_factor_[1];
ddx_.at(i) =
osqp_work->solution->x[i + 2 * num_of_knots_] / scale_factor_[2];
} //优化变量的取值
// Cleanup
osqp_cleanup(osqp_work);
FreeData(data);
c_free(settings);
return true;
3. 路径规划算法代码解读
3.1 总流程和决策\优化的入口函数
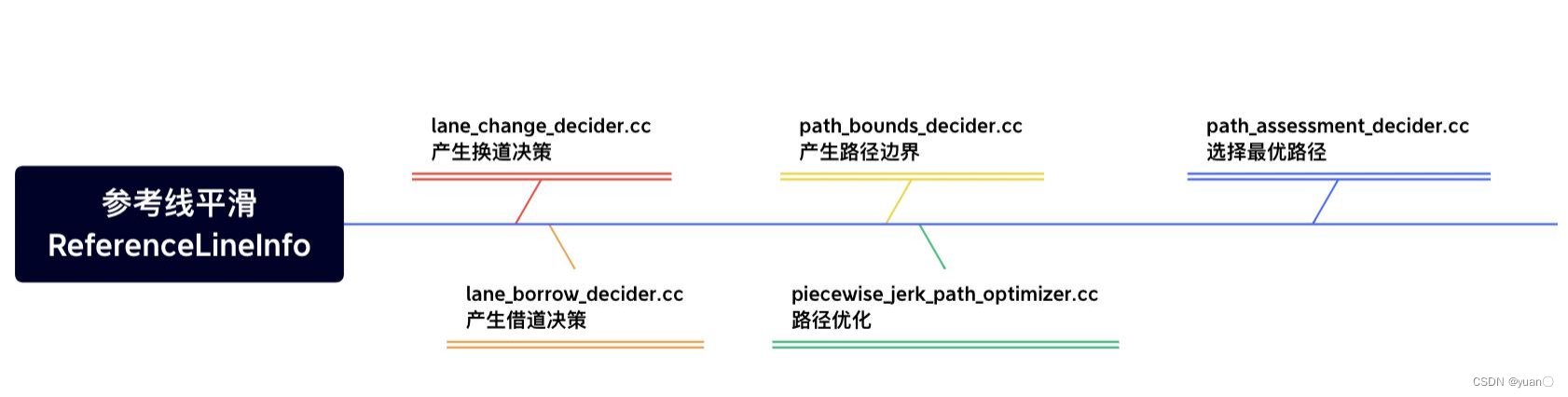 路径规划从参考线平滑开始,参考线模块结束后,会将中间计算结果保存在ReferenceLineinfo之中。之后按照路径规划的任务,依次执行上图中的任务。任务包括了决策器以及优化器的任务。
路径规划从参考线平滑开始,参考线模块结束后,会将中间计算结果保存在ReferenceLineinfo之中。之后按照路径规划的任务,依次执行上图中的任务。任务包括了决策器以及优化器的任务。

3.2 产生换道决策
// /home/yuan/apollo-edu/modules/planning/tasks/deciders/lane_change_decider/lane_change_decider.cc
void LaneChangeDecider::UpdateStatus(double timestamp,
ChangeLaneStatus::Status status_code,
const std::string& path_id) {
auto* lane_change_status = injector_->planning_context()
->mutable_planning_status()
->mutable_change_lane();
lane_change_status->set_timestamp(timestamp);
lane_change_status->set_path_id(path_id);
lane_change_status->set_status(status_code);
}
产生换道的状态,之后将结果保存在injector中。
3.3 产生借道决策
// /home/yuan/apollo-edu/modules/planning/tasks/deciders/path_lane_borrow_decider/path_lane_borrow_decider.cc
// By default, don't borrow any lane.
reference_line_info->set_is_path_lane_borrow(false);
// Check if lane-borrowing is needed, if so, borrow lane.
if (Decider::config_.path_lane_borrow_decider_config()
.allow_lane_borrowing() &&
IsNecessaryToBorrowLane(*frame, *reference_line_info)) {
reference_line_info->set_is_path_lane_borrow(true);
}
当产生阶导决策时,会将相应标志位置true。
if (!left_borrowable && !right_borrowable) {
mutable_path_decider_status->set_is_in_path_lane_borrow_scenario(false);
return false;
} else {
mutable_path_decider_status->set_is_in_path_lane_borrow_scenario(true);
if (left_borrowable) {
mutable_path_decider_status->add_decided_side_pass_direction(
PathDeciderStatus::LEFT_BORROW);
}
if (right_borrowable) {
mutable_path_decider_status->add_decided_side_pass_direction(
PathDeciderStatus::RIGHT_BORROW);
}
}
同时,在进行借道决策时,会对左右借道进行判断。借道的状态保存在injetor里。
3.4 产生路径边界



根据现有决策在参考线上进行采样,获得每个点在
l
l
l的边界。有四种边界决策:GenerateRegularPathBound(自车道行驶)、GenerateFallbackPathBound(失败回退)、GenerateLaneChangePathBound、GeneratePullOverPathBound。最后将边界保存在SetCandidatePathBoundaries中,供下一步使用。
3.5 路径优化
piecewise_jerk_problem.set_x_ref(std::move(weight_x_ref_vec),
path_reference_l_ref);
}
// for debug:here should use std::move
piecewise_jerk_problem.set_weight_x(w[0]);
piecewise_jerk_problem.set_weight_dx(w[1]);
piecewise_jerk_problem.set_weight_ddx(w[2]);
piecewise_jerk_problem.set_weight_dddx(w[3]);
piecewise_jerk_problem.set_scale_factor({1.0, 10.0, 100.0});
auto start_time = std::chrono::system_clock::now();
piecewise_jerk_problem.set_x_bounds(lat_boundaries);
piecewise_jerk_problem.set_dx_bounds(-FLAGS_lateral_derivative_bound_default,
FLAGS_lateral_derivative_bound_default);
piecewise_jerk_problem.set_ddx_bounds(ddl_bounds);
// Estimate lat_acc and jerk boundary from vehicle_params
const auto& veh_param =
common::VehicleConfigHelper::GetConfig().vehicle_param();
const double axis_distance = veh_param.wheel_base();
const double max_yaw_rate =
veh_param.max_steer_angle_rate() / veh_param.steer_ratio() / 2.0;
const double jerk_bound = EstimateJerkBoundary(std::fmax(init_state[1], 1.0),
axis_distance, max_yaw_rate);
piecewise_jerk_problem.set_dddx_bound(jerk_bound);
bool success = piecewise_jerk_problem.Optimize(max_iter);
调用piecewise_jerk_problem类进行求解,会设置一些权重以及一些约束,利用Optimize函数进行求解。
const auto& path_boundaries =
reference_line_info_->GetCandidatePathBoundaries();
ADEBUG << "There are " << path_boundaries.size() << " path boundaries.";
const auto& reference_path_data = reference_line_info_->path_data();
std::vector<PathData> candidate_path_data;
for (const auto& path_boundary : path_boundaries) {
size_t path_boundary_size = path_boundary.boundary().size();
reference_line_info_->GetCandidatePathBoundaries();保存候选路径。
if (candidate_path_data.empty()) {
return Status(ErrorCode::PLANNING_ERROR,
"Path Optimizer failed to generate path");
}
reference_line_info_->SetCandidatePathData(std::move(candidate_path_data));
3.6 选择最优路径
bool ComparePathData(const PathData& lhs, const PathData& rhs,
const Obstacle* blocking_obstacle) {
ADEBUG << "Comparing " << lhs.path_label() << " and " << rhs.path_label();
// Empty path_data is never the larger one.
if (lhs.Empty()) {
ADEBUG << "LHS is empty.";
return false;
}
if (rhs.Empty()) {
ADEBUG << "RHS is empty.";
return true;
}
调用ComparePathData函数,对路径进行两两比较。
*(reference_line_info->mutable_path_data()) = valid_path_data.front();
reference_line_info->SetBlockingObstacle(
valid_path_data.front().blocking_obstacle_id());
将最优的路径保存在reference_line_info中。将阻塞障碍物最近的放在reference_line_info中,供速度规划进一步处理。
4. 路径规划算法实践
云实验地址——Apollo规划之路径规划仿真调试
4.1 观察借道绕行、自车道绕行障碍物、自车道巡航、换道时路径的边界和规划的路径
(1)在终端中输入以下指令,启动dreamview
bash scripts/bootstrap_neo.sh
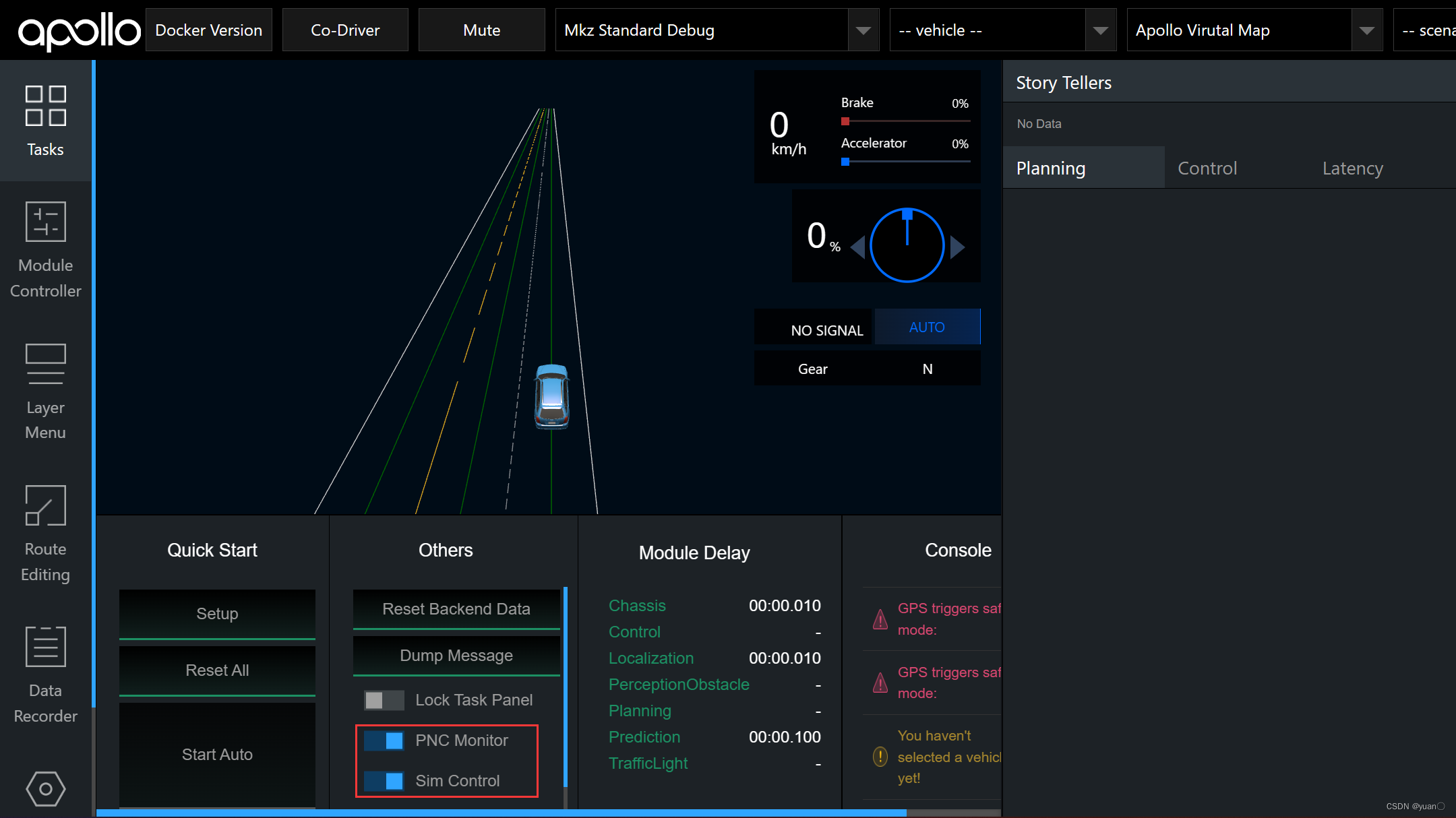
 (2)模式选择
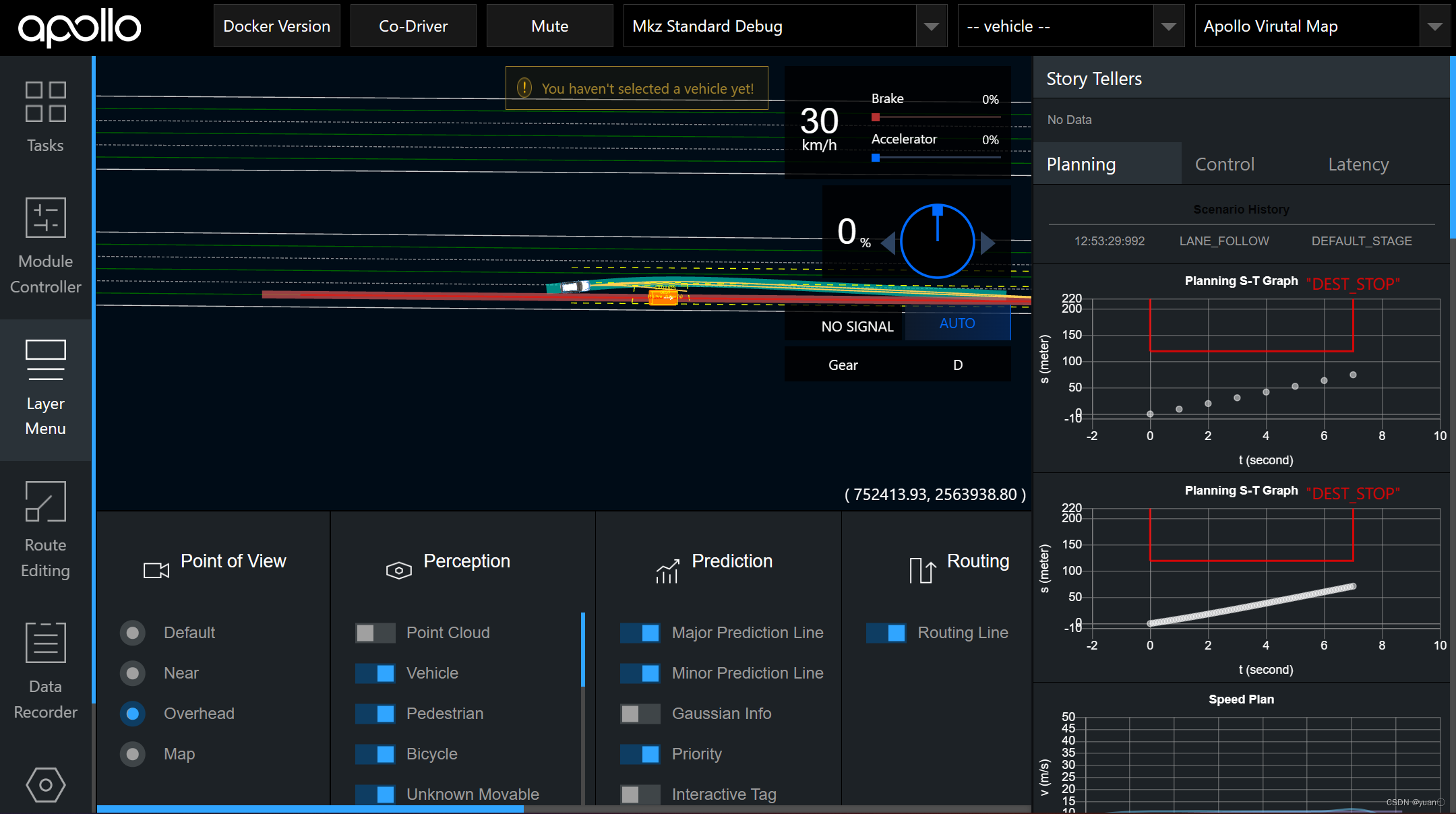
(2)模式选择Mkz Standard Debug,地图选择Apollo Virutal Map,打开Sim_Control模式,打开PNC Monitor,等待屏幕中间区域出现Mkz车模型和地图后即表示成功进入仿真模式。
 (3)点击左侧Tab栏
(3)点击左侧Tab栏Module Controller,启动Planning,Prediction,Routing模块,如果需要录制数据则打开Recorder模块。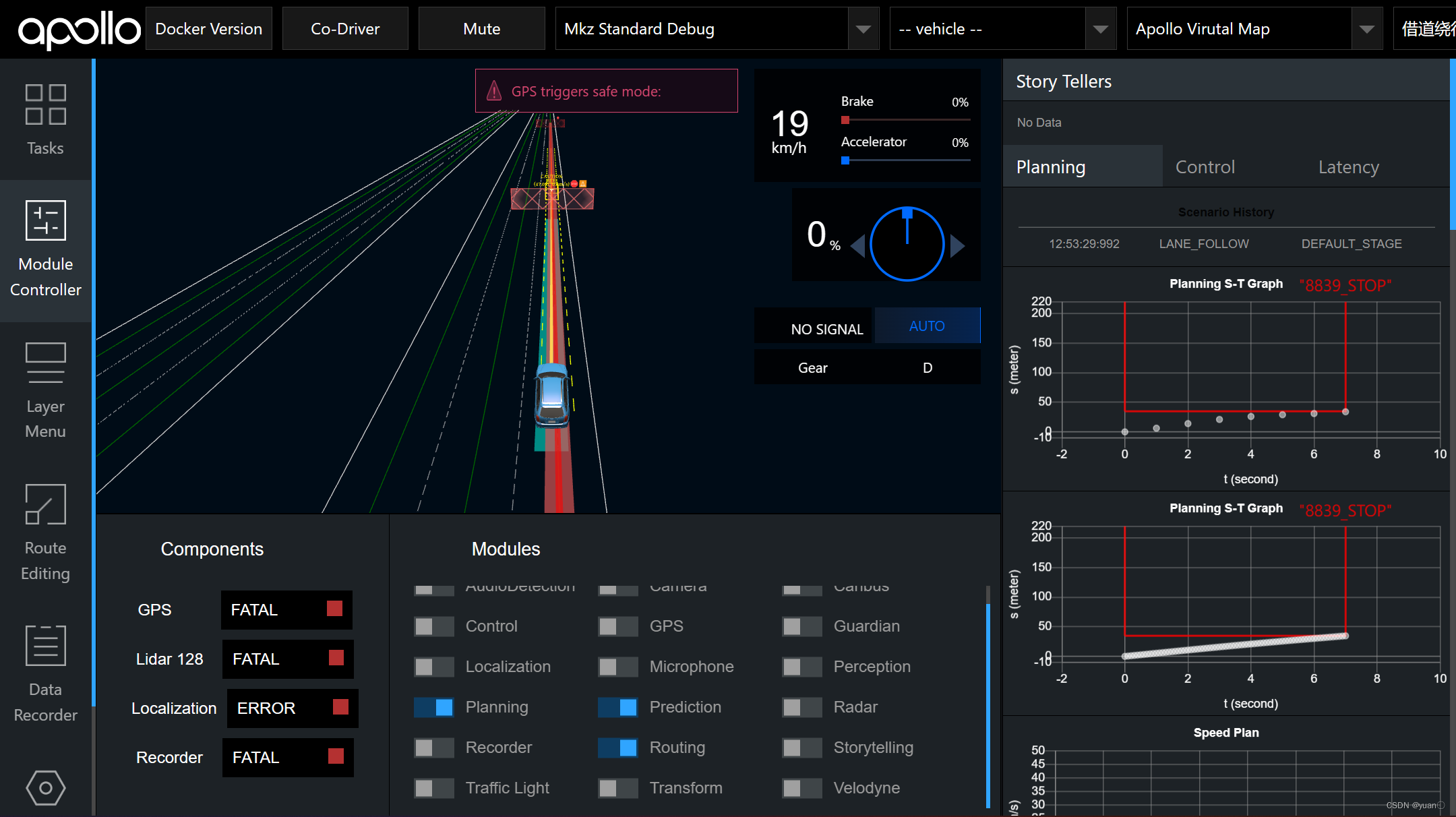 (4)模块启动完成后,点击左侧Tab栏
(4)模块启动完成后,点击左侧Tab栏Profile,选择Scenario Profiles里的course场景集,右上角选择场景场景开始仿真,分别点击自车道内行驶,绕行障碍物,借道绕行,换道场景。观察路径曲线和路径边界.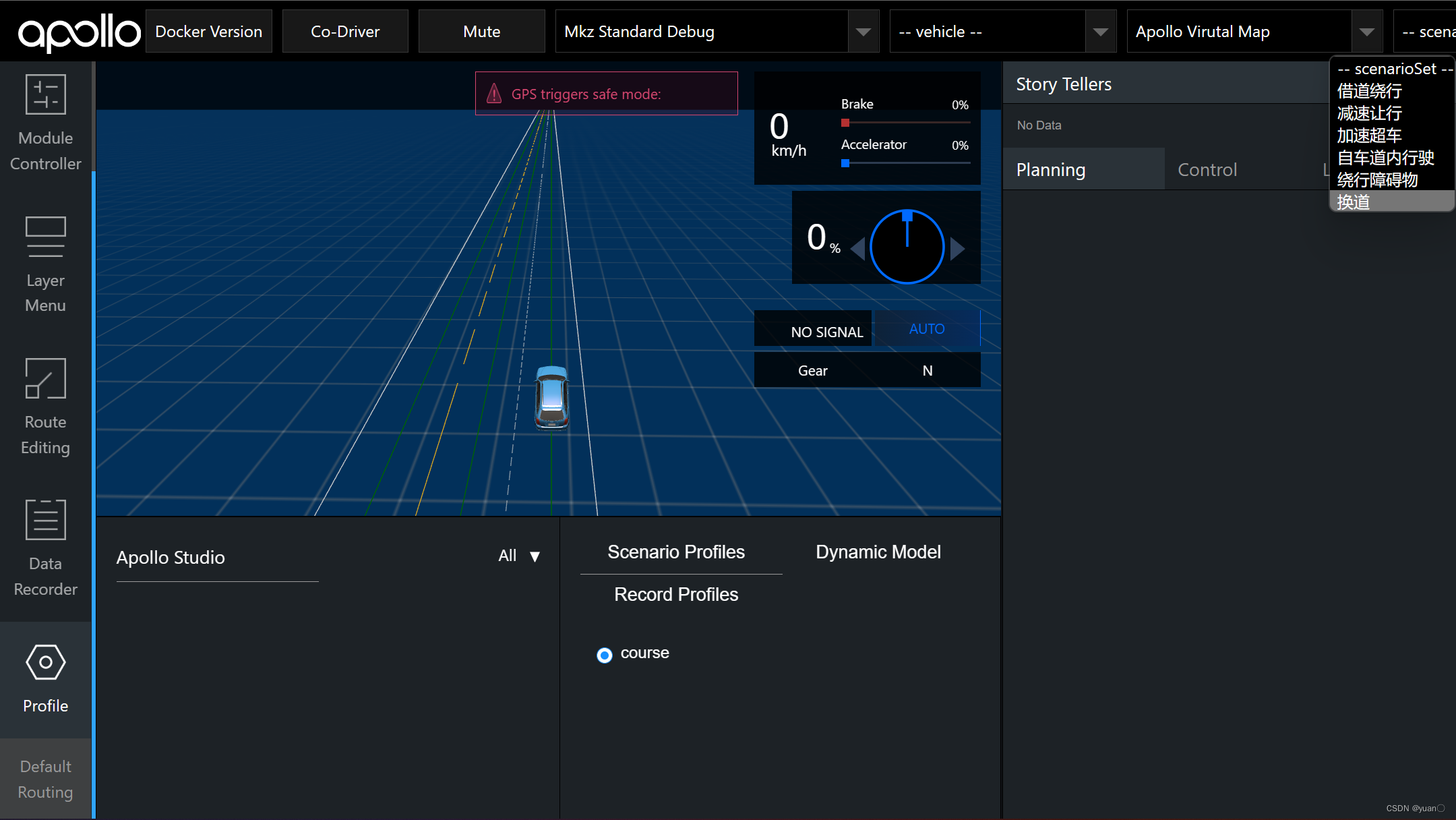
Layer Menu中控制Planning的各个path和boundary开关可以显示和关闭每一条候选路径.






4.2 借道绕行场景,调整 l , l ’ , l ’’ l,l’,l’’ l,l’,l’’的权重系数,观察路径的变化
在modules/planning/conf/planning_config.pb.txt配置文件中,包含了路径规划任务的相关参数,我们可以过对这些参数的调整,达到我们期望路径规划效果。
(1)使用在线编辑工具修改/apollo/modules/planning/conf目录下的planning_config.pb.txt文件,增大default_path_config的l_weight,减小dl_weight ddl_weight dddl_weight。
default_task_config: {
task_type: PIECEWISE_JERK_PATH_OPTIMIZER
piecewise_jerk_path_optimizer_config {
default_path_config {
l_weight: 1.0
dl_weight: 20.0
ddl_weight: 1000.0
dddl_weight: 50000.0
}
lane_change_path_config {
l_weight: 1.0
dl_weight: 5.0
ddl_weight: 800.0
dddl_weight: 30000.0
}
}
}
(2)修改好代码参数后,保存这个文件,在ModuleController中重启planning模块(必须步骤)。
(3)重新选择借道绕行场景,观察轨迹和调整前有何变化
提前借道,提前回到原先车道,轨迹曲率更大。
4.3 靠边停车实践,开启靠边停车功能,观察路径的变化
恢复参数为默认值,在planning.conf中添加命令行参数–enable_scenario_pull_over=true,启动靠边停车,修改好代码参数后,保存这个文件,在Module Controller中重启planning模块(必须步骤)。

 靠边停车目标点产生惩罚项使得规划出的轨迹偏离原参考线。
靠边停车目标点产生惩罚项使得规划出的轨迹偏离原参考线。