“日志(logging)”有两个意思:
1.诊断日志(diagnostic log)。即log4j、logback、slf4j、glog、g2log、log4cxx、log4cpp、log4cplus、Pantheios、ezlogger等常用日志库提供的日志功能。
2.交易日志(trasaction log)。即数据库的write-ahead log、文件系统的journaling等,用于记录状态变更,通过回放日志可以逐步恢复每一次修改之后的状态。
本章的“日志”是前一个意思,即文本的、供人阅读的日志,通常用于故障诊断和追踪(trace),也可用于性能分析。日志通常是分布式系统中事故调查的唯一线索,用来追寻蛛丝马迹,查出元凶。
在服务端编程中,日志是必不可少的,在生产环境中应该做到“Log Evenrything All The Time”。对于关键进程,日志通常要记录:
1.收到的每条内部消息的id(还可以包括关键字段、长度、hash等)。
2.收到的每条外部消息的全文。
3.发出的每条消息的全文,每条消息都有全局唯一的id。
4.关键内部状态的变更,等等。
每条日志都有时间戳,这样就能完整追踪分布式系统中一个事件的来龙去脉。也只有这样才能查清楚发生故障时究竟发生了什么,比如业务处理流程卡在了哪一步。
诊断日志不光是给程序员看的,更多的时候是给运维人员看的,因此日志的内容应避免造成误解,不要误导调查故障的主攻方向,拖延故障解决的时间。
一个日志库大体可分为前端(frontend)和后端(backend)两部分。前端是供应用程序使用的接口(API),并生成日志消息(log message);后端则负责把日志消息写到目的地(destination)。这两部分的接口有可能简单到只有一个回调函数:
void output(const char *message, int len);
其中的message字符串是一条完整的日志消息,包含日志级别、时间戳、源文件位置、线程id等基本字段,以及程序出书的具体消息内容。
在多线程程序中,前端和后端都与单线程程序无甚区别,无非是每个线程有自己的前端,整个程序共用一个后端。但难点在于将日志数据从多个前端高效地传输到后端。这是一个典型的多生产者-单消费者问题,对生产者(前端)而言,要尽量做到低延迟、低CPU开销、无阻塞;对消费者(后端)而言,要做到足够大的吞吐量,并占用较少资源。
对C++程序而言,最好整个程序(包括主程序和程序库)都使用相同的日志库,程序有一个整体的日志输出,而不要各个组件有各自的日志输出。从这个意义上讲,日志库是个Singleton。
C++日志库的前端大体上有两种API风格:
1.C/Java的printf(fmt, …)风格,例如:
log_info("Received %d bytes from %s", len, getClientName().c_str());
2.C++的stream <<风格,例如:
LOG_INFO << "Received " << len << " bytes from " << getClientName();
muduo的日志库是C++ stream风格,这样用起来更自然,不必费心保持格式字符串与参数类型的一致性,可以随用随写,而且是类型安全(编译时或运行时没有不兼容或不合法的数据类型操作)的。
stream风格的另一个好处是当输出的日志级别高于语句的日志级别时,打印日志是个空操作,运行时开销接近零。比方说当日志级别为WARNING时,LOG_INFO<<是个空操作,这个语句根本不会调用std::string getClientName()函数,减小了开销。而printf风格不易做到这一点。
muduo没有用标准库中的iostream,而是自己写的LogStream class,这主要是出于性能原因(第十一章)。
常规的通用日志库如log4j/logback通常会提供丰富的功能,但这些功能不一定全都是必需的。
1.日志消息有多种级别(level),如TRACE、DEBUG、INFO、WARN、ERROR、FATAL等。
2.日志消息可能有多个目的地(appender),如文件、socket、SMTP等。
3.日志消息的格式可配置(layout),例如org.apache.log4j.PatternLayout(它是Apache Log4j 1.x中的一种日志输出布局,用于定义日志输出的格式,允许你指定日志消息中各种信息(例如日期、日志级别、日志消息内容等)的显示方式)。
4.可以设置运行时过滤器(filter),控制不同组件的日志消息的级别和目的地。
在上面几项中,作者认为除了第一项之外,其余三项都是非必需的功能。
日志的输出级别在运行时可调,这样同一个可执行文件可以分别在QA测试环境的时候输出DEBUG级别的日志,在生产环境输出INFO级别的日志(muduo默认输出INFO级别的日志,可通过环境变量控制输出DEBUG或TRACE级别的日志)。在必要的时候也可以临时在线调整日志的输出级别。例如某台机器的消息量过大、日志文件太多、磁盘空间紧张,那么可以临时调整为WARNING级别输出,减少日志数目。又比如某个新上线的进程的行为略显古怪,则可以临时调整为DEBUG级别输出,打印更细节的日志消息以便分析查错。调整日志的输出级别不需要重新编译,也不需要重启进程,只要调用muduo::Logger::setLogLevel()就能即时生效。
对于分布式系统中的服务进程而言,日志的目的地(destination)只有一个:本地文件。往网络写日志消息是不靠谱的,因为诊断日志的功能之一正是诊断网络故障,比如连接断开(网卡或交换机故障)、网络暂时不通(若干秒内没有收到心跳消息)、网络拥塞(消息延迟明显加大)等等。如果日志消息也是通过网络发到另一台机器上的,那岂不是一损俱损?如果接收网络日志消息的服务器(日志服务器)发生故障或者出现进程死锁(阻塞),通常会导致发送日志的多个服务进程阻塞,或者内存暴涨(用户态和内核态的TCP缓存),这无异于放大了单机故障。往网络写日志消息的另一个坏处是增加网络带宽消耗。试想收到一条业务消息、发出一条业务消息时都会写日志,如果写到网络上岂不是让网络带宽消耗翻倍,加剧trashing?同理,应该避免往网络文件系统(如NFS)上写日志,这等于掩耳盗铃。
以本地文件为日志的destination,那么日志文件的滚动(rolling)是必需的,这样可以简化日志归档(archive)的实现。rolling的条件通常有两个:文件大小(例如每写满1GB就换下一个文件)和时间(例如每天零点新建一个日志文件,不论前一个文件有没有写满)。muduo日志库的LogFile会自动根据文件大小和时间来主动滚动日志。既然能主动rolling,自然也就不必支持SIGUSR1了,毕竟多线程程序处理signal很麻烦(第四章)。
一个典型的日志文件的文件名如下:

这个文件名由以下几部分组成:
1.第1部分logfile_test是进程的名字。通常是main()参数中argv[0]的basename(3),这样容易区分究竟是哪个服务器程序的日志。必要时还可以把程序版本加进去。
2.第2部分是文件的创建时间(GMT时区,格林威治标准时间(Greenwich Mean Time)对应的本地时区)。这样很容易通过文件名来选择某一时间范围内的日志,例如用通配符*.20120603-14*表示2012年6月3日下午2点(GMT)左右的日志文件。
3.第3部分是机器名称。这样即使把日志文件拷贝到别的机器上也能追溯其来源。
4.第4部分是进程id。如果一个程序一秒内反复重启,那么每次都会生成不同的日志文件(第九章)。
5.第5部分是统一的后缀名.log。同样是为了便于周边配套脚本的编写。
muduo的日志文件滚动没有采用文件改名的办法,即dmesg.log是最新日志,dmesg.log.1是前一个日志,dmesg.log.2.gz是更早的日志等。这种做法的一个好处是dmesg.log始终是最新日志,便于编写某些及时解析日志的脚本。将来可以增加一个功能,每次滚动日志文件之后立刻创建(更新)一个symlink(符号链接,软链接),logfile_test.log始终指向当前最新的日志文件,这样达到相同的效果。
日志文件压缩与归档(archive,例如在非繁忙时段把压缩后的日志文件拷贝到某个NFS位置,以便集中保存和分析)不是日志库应有的功能,而应该交给专门的脚本去做,这样C++和Java的服务程序可以共享这一基础设施。如果想更换日志压缩算法或归档策略也不必动业务程序,改改周边配套脚本就行了。磁盘空间监控也不是日志库的必备功能。有人或许曾经遇到日志文件把磁盘占满的情况,因此希望日志库能限制空间使用,例如只分配10GB磁盘空间,用满之后就冲掉旧日志,重复利用空间,就像循环磁带一样。殊不知如果出现程序死循环拼命写日志的异常情况,那么往往是开头的几条日志最关键,它往往反映了引发异常(busy-loop)的原因(例如收到某条非法消息),后面都是无用的垃圾日志。如果日志库具备重复利用空间的“功能”,只会帮倒忙。磁盘写入的带宽按100MB/s计算,写满一个100GB的磁盘分组需要16分钟,这足够监控系统报警并人工干预了(第九章)。
往文件写日志的一个常见问题是,万一程序崩溃,那么最后若干条日志往往就丢失了,因为日志库不能每条消息都flush硬盘,更不能每条日志都open/close文件,这样性能开销太大。muduo日志库用两个办法来应对这一点,其一是定期(默认3秒)将缓冲区内的日志消息flush到硬盘;其二是每条内存中的日志消息都带有cookie(或者叫哨兵值/sentry),其值为某个函数的地址,这样通过在core dump文件中查找cookie就能找到尚未来得及写入磁盘的消息。
日志消息的格式是固定的,不需要运行时配置,这样可节省每条日志解析格式字符串的开销。作者认为日志的格式在项目的整个生命周期几乎不会改变,因为我们经常会为不同目的编写parse日志的脚本,既要解析最近几天的日志文件,也要和几个月之前,甚至一年之前的日志文件的同类数据做对比。如果在此期间日志格式变了,势必会增加很多无谓的工作量。如果真的需要调整消息格式,直接修改代码并重新编译即可。以下是muduo日志库的默认消息格式(图5-100):

日志消息格式有几个要点:
1.尽量每条日志占一行。这样很容易用awk、sed、grep等命令行工具来快速联机分析日志,比方说要查看“2012-06-03 08:02:00”至“2012-06-03 08:02:59”这一分钟内每秒打印日志的条数(直方图),可以运行:
grep -o '^20120603 08:02:..' | sort | uniq -c
2.时间戳精确到微秒。每条消息都通过gettimeofday(2)(可获得timeval时间结构)获得当前时间,这么做不会有什么性能损失。因为在x86-64 Linux上,gettimeofday(2)不是系统调用,不会陷入内核(可用strace(1)命令验证)。
3.始终使用GMT时区。对于跨州的分布式系统而言,可省去本地时区转换的麻烦(主要西方国家大多实行夏令时),更易于追查事件的顺序。
4.打印线程id。便于分析多线程程序的时序,也可以检测死锁。这里的线程id是指用调用LOG_INFO <<的线程,线程id的获取见第四章。
5.打印日志级别。在线查错的时候先看看有无ERROR日志,通常可加速定位问题。
6.打印源文件名和行号。修复bug的时候不至于搞错对象。
每行日志的前4个字段的宽度是固定的,以空格分隔,便于用脚本解析。另外,应该避免在日志格式(特别是消息id)中出现正则表达式的元字符(meta character),例如’[‘和’]'等等,这样在用less(1)命令查看日志文件的时候查找字符串更加便捷。
运行时的日志过滤器(filter)或许是有用的,例如控制不同部件(程序库)的输出日志级别,但作者认为这应该放到编译器去做,整个程序有一个整体的输出级别就足够好了。同时作者认为一个程序同时写多个日志文件(例如不同的日志级别或不同的组件写到不同的文件)是非常罕见的需求,这可以事后留给log archiver来分流,不必做到日志库中。不实现filter自然也能减小生成每条日志的运行时开销,可以提高日志库的性能。
编写Linux服务端程序的时候,我们需要一个高效的日志库。只有日志库足够高效,程序员才敢在代码中输出足够多的诊断信息,减小运维难度,提升效率。高性能体现在几方面:
1.每秒写几千上万条日志的时候没有明显的性能损失。
2.能应对一个进程产生大量日志数据的场景,例如1GB/min。
3.不阻塞正常的执行流程。
4.在多线程程序中,不造成争用(contention)。
这里列举一些具体的性能指标,考虑往普通7400 rpm SATA硬盘写日志文件的情况:
1.磁盘带宽约是110MB/s,日志库应该能瞬时写满这个带宽(不必持续太久)。
2.假如每条日志消息的平均长度是110字节,这意味着一秒要写100万条日志。
以上是“高性能”日志库的最低指标。如果磁盘带宽更高,那么日志库的预期性能指标也会相应提高。反过来说,在磁盘带宽确定的情况下,日志库的性能只要“足够好”就行了。假如某个神奇的日志库能往/dev/null写1000MB数据,那么到哪里去找这么快的磁盘来让程序写诊断日志呢?
这些指标初看起来有些异想天开,什么程序需要1秒写100万条日志消息呢?换一个角度其实很容易想明白,如果一个程序耗尽全部CPU资源和磁盘带宽可以做到1秒写100万条日志消息,那么当只需要1秒写10万条时候(比方说一秒处理两三万条消息,每条消息写三条日志:从哪里收到、计算结果如何、发到哪里),立刻就能腾出90%的资源来干正事(处理业务)。相反,如果一个日志库在满负荷的情况下只能1秒写10万条日志,真正用到生产环境,恐怕就只能1秒写1万条日志才不会影响正常业务处理,这其实钳制了服务器的吞吐量。
以下是muduo日志库在两台机器上的实测性能数据:
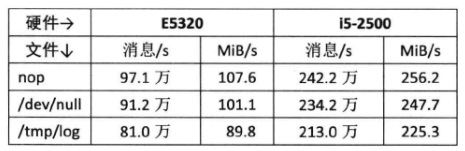
可见muduo日志库在现在的PC上能写到每秒200万条消息,带宽足够撑满两个千兆网连接或4个SATA组成的RAID10(也被称为RAID 1+0,是一种磁盘阵列级别,它将RAID 1(镜像)和RAID 0(条带化)两种技术结合在一起,最少需要4块硬盘,它提供了可靠的数据保护,同时在读写操作方面表现出色),性能是达标的(日志文件是顺序写入的,是对磁盘最友好的一种负载,对IOPS要求不高)。
为了实现这样的性能指标,muduo日志库的实现有几点优化措施值得一提:
1.时间戳字符串中的日期和时间两部分是缓存的,一秒之内的多条日志只需重新格式化微秒部分。图5-100中的3条日志消息中,“20120603 08:02:46”是复用的,每条日志只需要格式化微秒部分(“.125770Z”)。
2.日志消息的前4个字段是定长的,因此可以避免在运行期求字符串长度(不会反复调用strlen)。因为编译器认识memcpy(),对于定长的内存复制,会在编译期把它inline展开为高效的目标代码。
3.线程id是预先格式化为字符串,在输出日志消息时只需简单拷贝几个字节。见CurrentThread::tidString()。
4.每行日志消息的源文件名部分采用了编译期计算来获得basename,避免运行期strrchr(2)函数开销。见SourceFile class,这里利用了gcc的内置函数。
多线程程序对日志库提出了新的需求:线程安全,即多个线程可以并发写日志,两个线程的日志消息不会出现交织。线程安全不难办到,简单的办法是用一个全局mutex保护IO,或者每个线程单独写一个日志文件(Google C++日志库的默认多线程实现即如此),但这两种做法的高效性就堪忧了。前者会造成全部线程抢一个锁,后者有可能让业务线程阻塞在写磁盘操作上。
作者认为一个多线程程序的每个进程最好只写一个日志文件,这样分析日志更容易,不必在多个文件中跳来跳去。再说多线程写多个文件也不一定能提速(操作同一磁盘时,有磁盘读写队列)。解决办法不难想到,用一个背景线程负责收集日志消息,并写入日志文件,其他业务线程只管往这个“日志线程”发送日志消息,这称为“异步日志”。
在多线程服务程序中,异步日志(叫“非阻塞日志”似乎更准确)是必需的,因为如果在网络IO线程或业务线程中直接往磁盘写数据的话,写操作偶尔可能阻塞长达数秒之久(原因很复杂,可能是磁盘或磁盘控制器复位)。这可能导致请求方超时,或者耽误发送心跳消息,在分布式系统中更可能造成多米诺骨牌效应,例如误报死锁引发自动failover等。因此,在正常的实时业务处理流程中应该彻底避免磁盘IO,这在使用one loop per thread模型的非阻塞服务端程序中尤为重要,因为线程是复用的,阻塞线程意味着影响多个客户连接。
我们需要一个“队列”来将前端日志的数据发送到后端(日志线程),但这个“队列”不必是现成的BlockingQueue<std::string>,因为不用每次产生一条日志消息都通知(notify())接收方。
muduo日志库采用的是双缓冲(double buffering)技术,基本思路是准备两块buffer:A和B,前段负责往buffer A填数据(日志消息),后端负责将buffer B的数据写入文件。当buffer A写满后,交换A和B,让后端将buffer A的数据写入文件,而前端则往buffer B填入新的日志消息,如此往复。用两个buffer的好处是在新建日志消息的时候不必等待磁盘文件操作,也避免每条新日志消息都触发(唤醒)后端日志线程。换言之,前端不是将一条条日志分别传送到后端,而是将多条日志消息拼成一个大的buffer传送给后端,相当于批处理,减少了线程唤醒的频度,降低开销。另外,为了及时将日志消息写入文件,即使buffer A未满,日志库也会每3秒执行一次上述交换写入操作。
muduo异步日志的性能开销大约是前端每写一条日志消息耗时1.0us~1.6us。
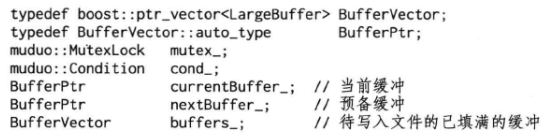
muduo实际采用了四个缓冲区,这样可以进一步减少或避免日志前端的等待。数据结构如下(muduo/base/AsyncLogging.h):
boost::ptr_vector是Boost C++ 库中的一个容器类,用于管理指针的动态数组。它提供了一种在运行时创建和销毁对象的方式,这些对象以指针的形式存储在容器中。boost::ptr_vector已经过时,并不再推荐在新代码中使用。C++11和以后的标准库提供了更好的智能指针和容器,如std::vector与std::shared_ptr或std::unique_ptr结合使用,以实现更安全和高效的动态内存管理。
boost::ptr_vector::auto_type是boost::ptr_vector类中的一个成员类型,它用于表示boost::ptr_vector中存储的指针类型。
其中,LargeBuffer类型是FixedBuffer class template的一份具体实现(instantiation),其大小为4MB,可以存至少1000条日志消息。boost::ptr_vector<T>::auto_type类型类似C++11中的std::unique_ptr,具备移动语义(move semantics),而且能自动管理对象生命期。mutex_用户保护后面的4个数据成员。buffers_存放的是供后端写入的buffer。
先来看发送方代码:
void AsyncLogging::append(const char *logline, int len)
{
muduo::MutexLockGuard lock(mutex_);
// most common case: buffer is not full, copy data here
if (currentBuffer_->avail() > len)
{
currentBuffer_->append(logline, len);
}
// buffer is full, push it, and find next spare buffer
else
{
// 将currentBuffer移入buffers_
buffers_.push_back(currentBuffer_.release());
// is there is one already, use it
if (nextBuffer_)
{
// 移动,而非复制
// 在Boost C++库的boost::ptr_container中,move是一个成员函数
// 用于将元素从一个ptr_container移动到另一个
// 这个函数对于在不同容器之间转移拥有的指针对象非常有用,而不是复制它们。
currentBuffer_ = boost::ptr_container::move(nextBuffer_);
}
// allocate a new one
else
{
// Rarely happens
currentBuffer_.reset(new LargeBuffer);
}
currentBuffer_->append(logline, len);
cond_.notify();
}
}
前端在生成一条日志消息的时候会调用AsyncLogging::append()。在这个函数中,如果当前缓冲(currentBuffer_)剩余的空间足够大,则会直接把日志消息拷贝(追加)到当前缓冲中,这是最常见的情况。这里拷贝一条日志消息并不会带来多大开销。前后端代码的其余部分都没有拷贝日志,而是简单的指针交换。
否则说明当前缓冲已经写满,就把它送入(移入)buffers_( buffers_.push_back(currentBuffer_.release());),然后试图把预备好的另一块缓冲(next_Buffer_)移用(move)为当前缓冲,然后追加消息日志并通知(唤醒)后端开始写入日志数据。以上两种操作在临界区之内都没有耗时的操作,运行时间为常数。
如果前端写入速度太快,一下子把两块缓冲都用完了,那么只好分配一块新的buffer,作为当前缓冲,这是极少发生的情况。
再来看接收方(后端)实现,这里只给出了最关键的临界区内代码:
void AsyncLogging::threadFunc()
{
BufferPtr newBuffer1(new LargeBuffer);
BufferPtr newBuffer2(new LargeBuffer);
// reserve()从略
BufferVector buffersToWrite;
while (running_)
{
// swap out what need to be written, keep CS short
{
muduo::MutexLockGuard lock(mutex_);
// unusual usage!
if (buffers_.empty())
{
cond_.waitForSeconds(flushInterval_);
}
// 移动,而非复制
buffers_.push_back(currentBuffer_.release());
// 移动,而非复制
currentBuffer_ = boost::ptr_container::move(newBuffer1);
// 内部指针交换,而非复制
buffersToWrite.swap(buffers_);
// 如果没有nextBuffer_,说明在append的时候第currentBuffer_已被写满,因此
// currentBuffer_已经被移到了buffers_中,nextBuffer_的内容已被move到了currentBuffer_里
if (!nextBuffer_)
{
// 移动,而非复制
nextBuffer_ = boost::ptr_container::move(newBuffer2);
}
}
// output buffersToWrite to file
// re-fill newBuffer1 and newBuffer2
}
// flush output
}
首先准备好两块空闲的buffer,以备在临界区内交换。在临界区内,等待条件触发,这里的条件有两个:其一是超时,其二是前端写满了一个或多个buffer。这里是非常规的condition variable用法,它没有使用while循环,而且等待时间有上限。
当“条件”满足时,先将当前缓冲(currentBuffer_)移入buffers_,并立刻将空闲的newBuffer1移为当前缓冲。注意这整段代码位于临界区之内,因此不会有任何race condition。接下来将buffers_与buffersToWrite交换,后面的代码可以在临界区之外安全地访问buffersToWrite,将其中的日志数据写入文件。临界区里最后干的一件事情是用newBuffer2替换nextBuffer_,这样前端始终有一个预备buffer可供调配。nextBuffer_可以减少前端临界区分配内存的概率,缩短前端临界区长度。注意到后端临界区内也没有耗时操作,运行时间为常数。
// re-fill newBuffer1 and newBuffer2会将buffersToWrite内的buffer重新填充到newBuffer1和newBuffer2(newBuffer1和newBuffer2在临界区中被move了,指向空,此处重新将buffersToWrite里的缓冲区赋予newBuffer1和newBuffer2),这样下次执行的时候还有两个空闲buffer可用于替换前端的当前缓冲和预备缓冲。最后,这四个缓冲在程序启动的时候会全部填充为0,这样可以避免程序热身时page fault(页错误,缺页中断)引发性能不稳定(在程序启动时,将缓冲区填充为0可以让程序访问那些未加载到物理内存中的页面,从而将其加载到物理内存中,这样在程序的热身阶段,即程序刚开始运行时,不会因为打印日志时的缓冲区缺页而引起性能降低)。
以下用图表展示前端和后端的具体交互情况。一开始分配好四个缓冲区A、B、C、D,前端和后端各持有其中两个。前端和后端各有一个缓冲区数组,初始时都是空的。
第一种情况是前端写日志的频度不高,后端3秒超时后将“当前缓冲currentBuffer_”写入文件:

在第2.9秒的时候,currentBuffer_使用了80%,在第3秒的时候后端线程醒过来,先把currentBuffer_送入buffers_,再把newBuffer1移用为currentBuffer_。随后第3+秒,交换buffers_和buffersToWrite,离开临界区,后端开始将buffer A写入文件。写完(write done)之后再把newBuffer1重新填上,等待下一次cond_.waitForSeconds()返回。
后面在画图时将有所简化,不再画出buffers_和buffersToWrite交换的步骤。
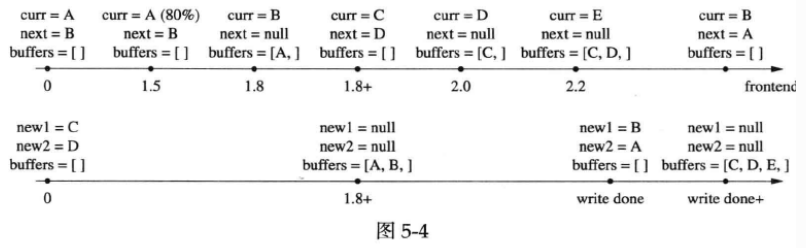
第二种情况,在3秒超时之前已经写满了当前缓冲,于是唤醒后端线程开始写入文件:
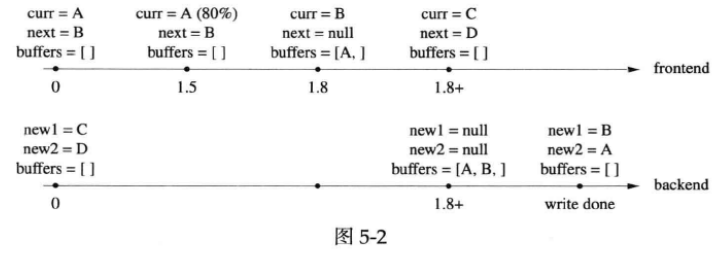
在第1.5秒的时候,currentBuffer_使用了80%;第1.8秒,currentBuffer_写满,于是将当前缓冲送入buffers_,并将nextBuffer_移用为当前缓冲,然后唤醒后端线程开始写入。当后端线程唤醒之后(第1.8+秒),先将currentBuffer_送入buffers_,再把newBuffer1移用为currentBuffer_,然后交换buffers_和buffersToWrite,最后用newBuffer2替换nextBuffer_,即保证前端有两个空缓冲可用。离开临界区之后,将buffersToWrite中的缓冲区A和B写入文件,写完之后重新填充newBuffer1和newBuffer2,完成一次循环。
上面这两种情况都是最常见的,再来看一看前端需要分配新buffer的两种情况。
第三种情况,前端在短时间内密集写入日志消息,用完了两个缓冲,并重新分配了一块新的缓存:
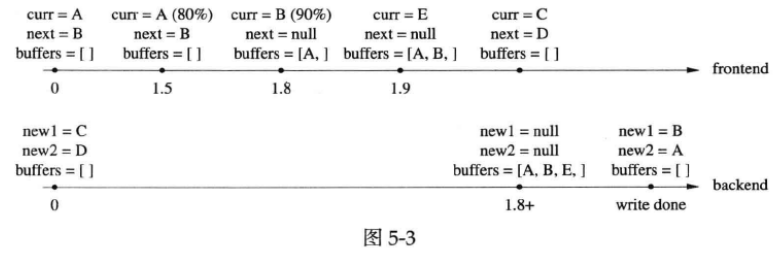
在第1.8秒的时候,缓冲A已经写满,缓冲B也接近写满,并且已经notify()了后端线程,但是出于种种原因,后端线程并没有立刻开始工作。到了第1.9秒,缓冲区B也已经写满,前端线程新分配了缓冲E。到了第1.8+秒,后端线程终于获得控制权,将C、D两块缓冲交给前端,并开始将A、B、E依次写入文件。一段时间之后,完成写入操作,用A、B重新填充那两块空闲缓冲。注意这里有意用A和B来填充newBuffer1/2,而释放了缓冲E,这是因为使用A和B不会造成page fault。
第四种情况,文件写入速度较慢,导致前端耗尽了两个缓冲,并分配了新缓冲:
前1.8+秒的场景和前面“第二种情况”相同,前端写满了一个缓冲,唤醒后端线程开始写入文件。之后,后端花了较长时间(大半秒)才将数据写完。这期间前端又用完了两个缓冲,并分配了一个新的缓冲,这期间前端的notify()已经丢失。当后端写完(write done)后,发现buffers_不为空,立刻进入下一循环。即替换前端的两个缓冲,并开始一次写入C、D、E。假定前端在此期间产生的日志较少,后端会将C、D分别填充到new1、new2,然后释放E,之后进入下一次循环。
前面我们一共准备了四块缓冲,应该足以应付日常需求,如果需要进一步增加buffer数目,可以改用下面的数据结构:

初始化时在emptyBuffers_中放入足够多空闲buffer,这样前端几乎不会遇到需要在临界区内新分配buffer的情况,这是一种空间换时间的做法。为了避免短时突发写大量日志造成新分配的buffer占用过多内存,后端代码应该保证emptyBuffers_和fullBuffers_的长度之和不超过某个定值。buffer在前端和后端之间流动,形成一个循环:

万一前端陷入死循环,拼命发送日志消息,超过后端的处理(输出)能力,会导致什么后果?对于同步日志来说,这不是问题,因为阻塞IO自然就限制了前端的写入速度,起到了节流阀(throttling)的作用。但是对于异步日志来说,这就是典型的生产速度高于消费速度问题,会造成数据在内存中堆积,严重时引发性能问题(可用内存不足)或程序崩溃(分配内存失败)。
muduo日志库处理日志堆积的方法很简单:直接丢掉多余的日志buffer,以腾出内存,见muduo/base/AsyncLogging.cc第87~96行代码。这样可以防止日志库本身引起程序故障,是一种自我保护措施。将来或许可以加上网络报警功能,通知人工介入,以尽快修复故障。
当然在前端和后端之间高效传递日志消息的办法不止这一种,比方说使用常规的muduo::BlockingQueue<std::string>或muduo::BoundedBlockingQueue<std::string>在前后端之间传递日志消息,其中每个std::string是一条消息。这种做法每条日志消息都要分配内存,特别是在前端线程分配的内存要由后端线程释放,因此对malloc的实现要求较高,需要针对多线程特别优化。另外,如果用这种方案,那么需要修改LogStream的Buffer,使之直接将日志写到std::string中,可节省一次内存拷贝。
相比前面展示的直接拷贝日志消息的做法,这个传递指针的方案(前文说的是传递string,这里的意思是改为传递string的指针?)似乎会更高效,但据作者测试,直接拷贝日志数据的做法比传递指针快3倍(在每条日志消息不大于4kB的时候),估计是内存分配的开销所致。因此muduo日志库只提供了C风格字符串、双缓冲区的异步日志机制。这再次说明性能不能凭感觉说了算,一定要有典型场景的测试数据作为支撑。
muduo现在的异步日志实现用了一个全局锁。尽管临界区很小,但是如果线程数目较多,锁争用(lock contention)也可能影响性能。一种解决办法是像Java的ConcurrentHashMap那样用多个桶子(bucket),前端写日志的时候再按线程id哈希到不同的bucket中,以减少contention。这种方案的后端实现较为复杂。
为了简化实现,目前muduo日志库只允许指定日志文件的名字,不允许指定其路径。日志库会把日志文件写到当前路径,因此可以在启动脚本(shell脚本)里改变当前路径,以达到相同的目的。
Linux默认会把core dump写到当前目录,而且文件名是固定的core。为了不让新的core dump文件冲掉旧的,我们可以通过sysctl命令设置kernel.core_pattern参数(也可以修改/proc/sys/kernel/core_pattern),让每次core dump都产生不同的文件。例如设为%e.%t.%p.%u.core,其中各个参数的含义见man 5 core。另外也可以使用Apport来收集有用的诊断信息,见https://wiki.ubuntu.com/Apport。