文章目录
- 一、ROS简介
- 二、ROS安装
- 三、ROS安装测试
- 四、安装问题解决
- 1. sudo rosdepc init:找不到命令
- 2. ERROR: cannot download default sources list from...
- 3. Command 'roscore' not found...
- 4. Resource not found: roslaunch...
一、ROS简介
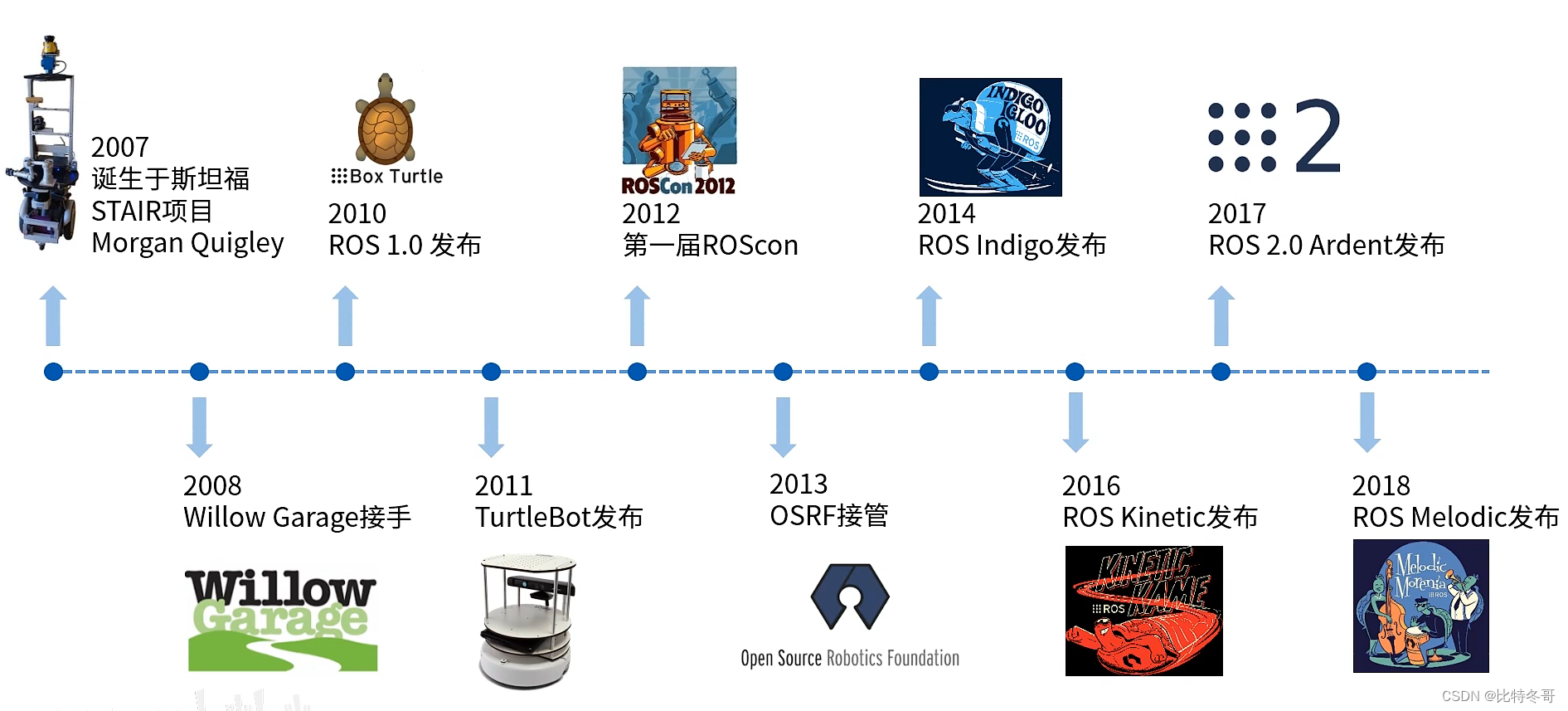
ROS是用于编写机器人软件程序的一种具有高度灵活性的软件架构。它包含了大量工具软件、库代码和约定协议,旨在简化跨机器人平台创建复杂、鲁棒的机器人行为这一过程的难度与复杂度。
随着机器人领域的快速发展和复杂化,代码的复用性和模块化的需求原来越强烈,而已有的开源机器人系统又不能很好的适应需求。2010年Willow Garage公司发布了开源机器人操作系统ROS(robot operating system),很快在机器人研究领域展开了学习和使用ROS的热潮。
二、ROS安装
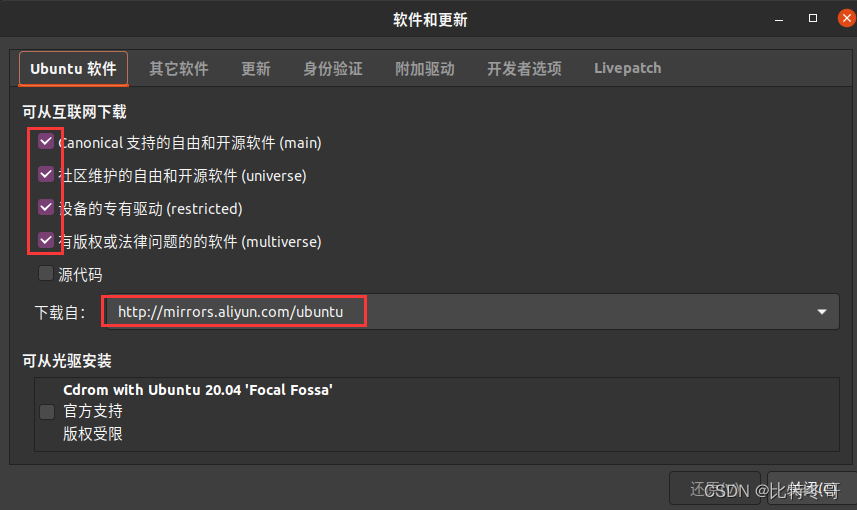
- 1. 第一步,配置软件库
在主界面左下角“显示应用程序中”选择“软件和更新”,参考如下配置
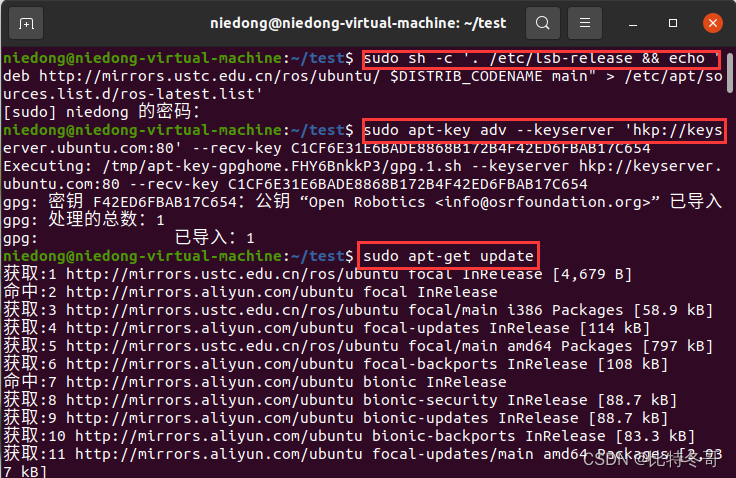
- 2. 第二步,添加ROS软件源
在终端中输入如下指令:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
- 3. 第三步,添加密钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
- 4. 第四步,更新系统
sudo apt-get update
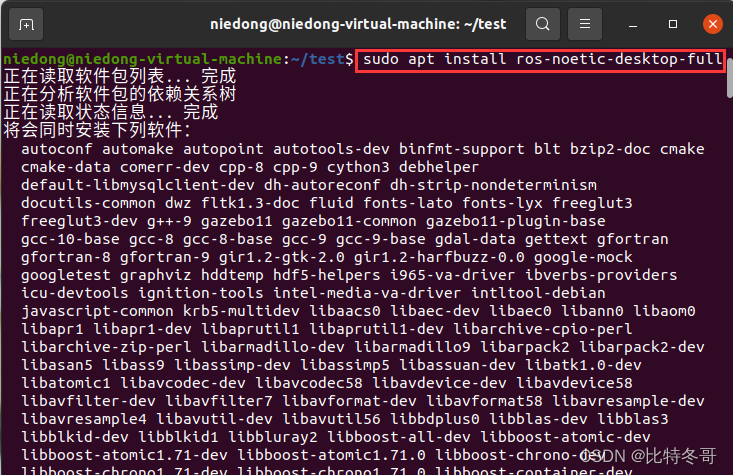
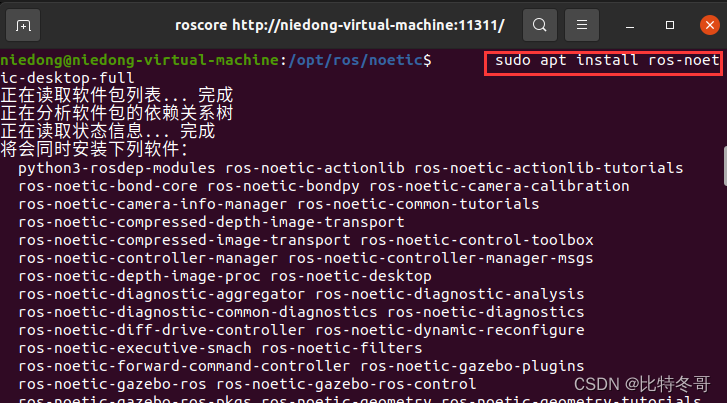
- 5. 第五步,安装ROS
sudo apt install ros-noetic-desktop-full
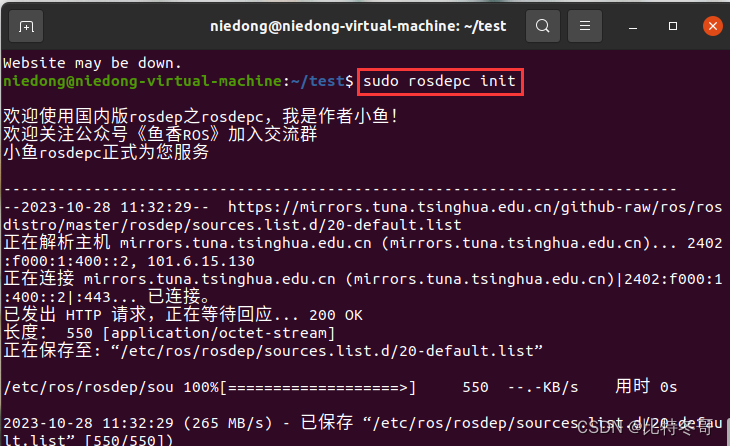
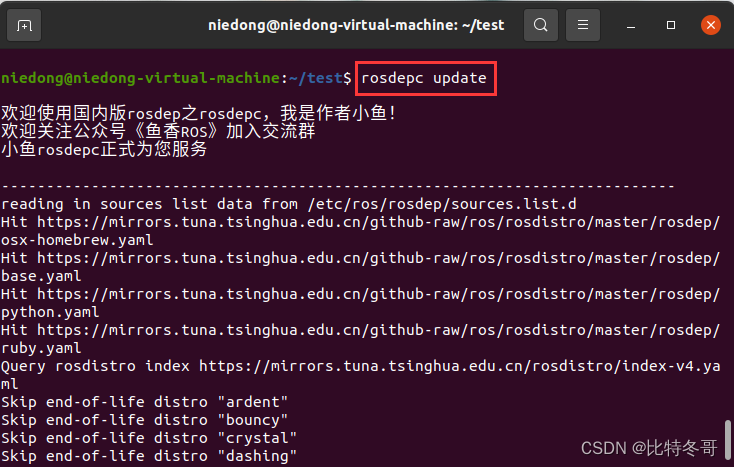
- 6. 第六步,初始化rosdep
sudo rosdepc init
rosdepc update
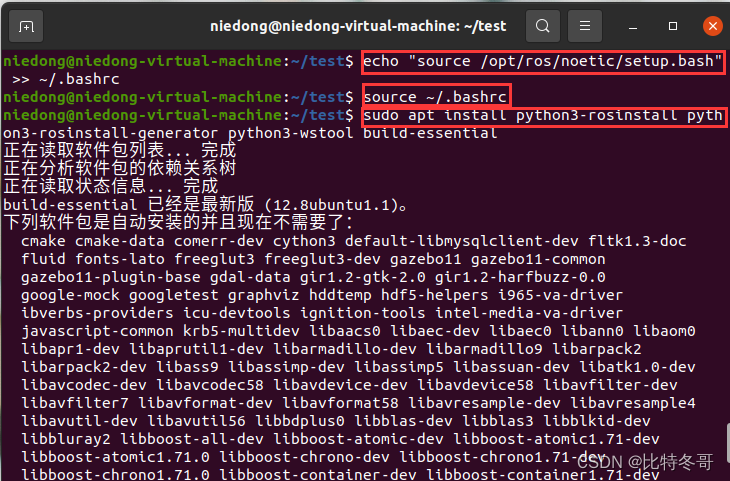
- 7. 第七步,设置环境变量
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
- 8. 第八步,安装 rosinstall
sudo apt install python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
三、ROS安装测试
①在第一个终端下输入:
roscore
②在第二个终端下输入:
rosrun turtlesim turtlesim_node
③在第三个终端下输入:
rosrun turtlesim turtle_teleop_key
点击第三个窗口,用 ↑ ↓ ← →可控制小海龟走向
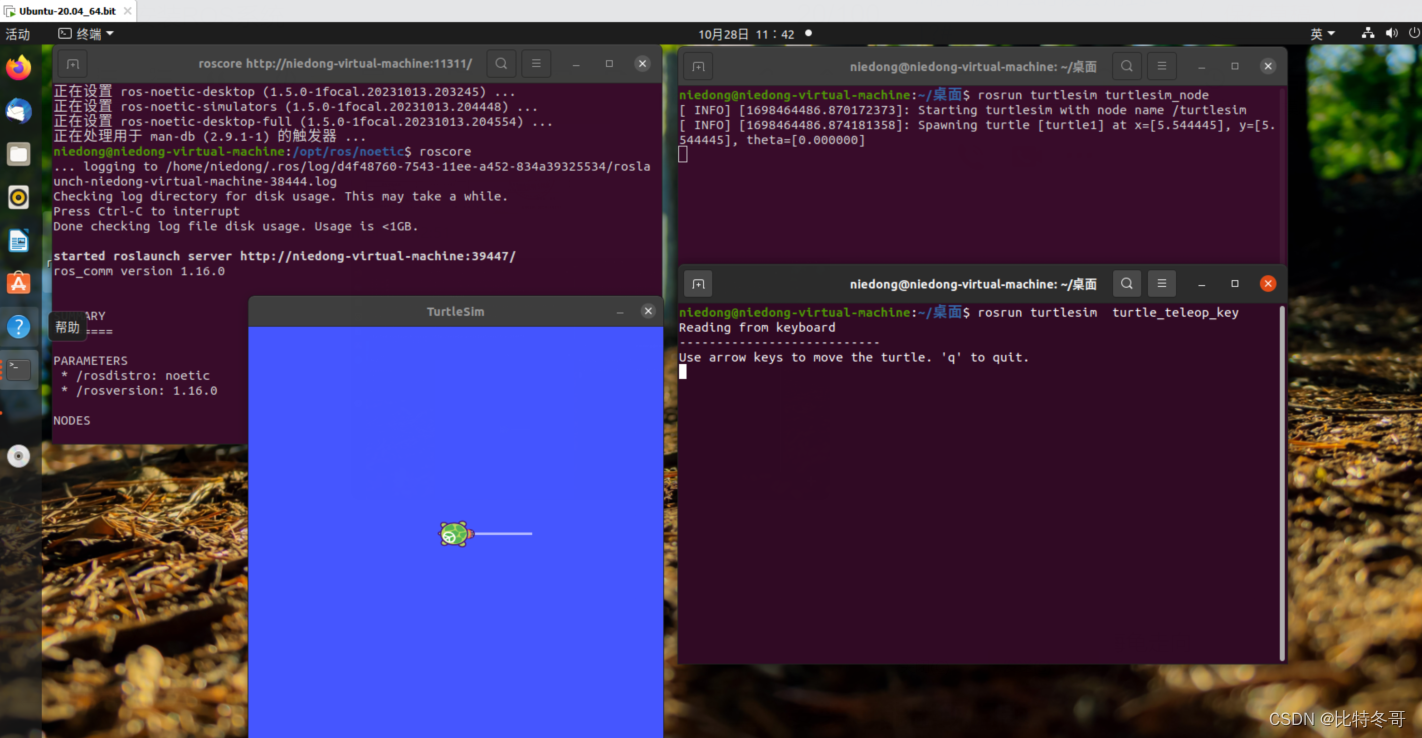
至此,ROS安装成功!
四、安装问题解决
1. sudo rosdepc init:找不到命令

解决方法:安装python3-rosdep2
sudo apt install python3-rosdep2
2. ERROR: cannot download default sources list from…

解决方法:
sudo pip install rosdepc
如果显示没有pip可以试试pip3:
sudo pip3 install rosdepc
如果pip3还没有就:
sudo apt-get install python3-pip
sudo pip install rosdepc
3. Command ‘roscore’ not found…
解决方法:
sudo apt install python3-roslaunch

4. Resource not found: roslaunch…
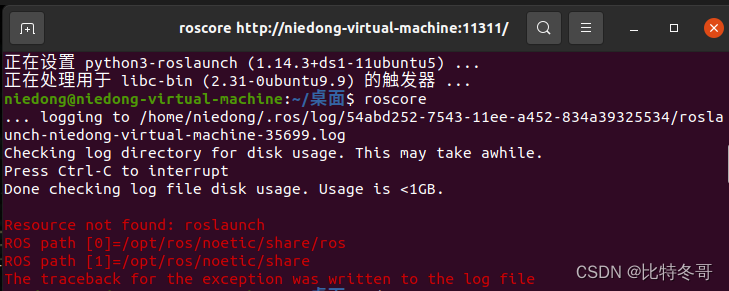
解决方法:
sudo apt install ros-noetic-desktop-full







![[AUTOSAR][诊断管理][ECU][$22] 读取相关的数据](https://img-blog.csdnimg.cn/bd06d5c875f94ccc964f1cba50b6eda3.png)