1. EKF1~EKF3
待续…
2. Ardupilot滤波算法的演变
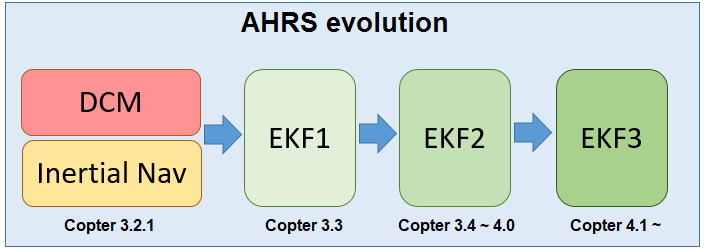
使用DCM还是EKF?
AHRS_EKF_USE: set to “1” to use the EKF, “0” to use DCM for attitude control and inertial nav (Copter-3.2.1) or ahrs dead reckoning (Plane) for position control. In Copter-3.3 (and higher) this parameter is forced to “1” and cannot be changed.
3. EKF3
- AHRS_EKF_TYPE = 3
EK2_ENABLE = 0
EK3_ENABLE = 1 - 飞控有多少个IMU就会运行多少个 EKF core 或称 EKF lane
EK3_IMU_MASK 参数决定哪些IMU用于运行EKF lane. - 只有一个EKF lane 被用作飞机的状态估计AHRS,由参数EK3_PRIMARY决定,0 selects the first IMU lane in the EK3_IMU_MASK, 1 the second。这个用作AHRS的EKF3 lane 被称为 primary lane
- 当 primary lane 出问题(误差很大,innovation大)时就会发生lane切换,即将其他表现正常的 EKF lane 切换为 primary lane,称为 Lane Switching
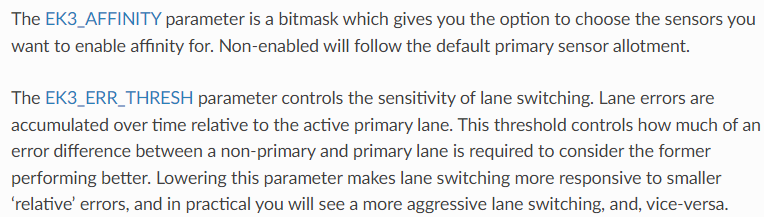
- Lane Switching 由传感器的亲和度 EK3_AFFINITY 和错误阈值 EK3_ERR_THRESH 决定。
- EK3_AFFINITY 和 EK3_ERR_THRESH 如何设置?
3.1 例子
某飞控具有:
3 IMUs
1 Barometer
2 GPS
2 Airspeeds
3 Magnetometers
EKF Lane 的传感器分配情况如下:
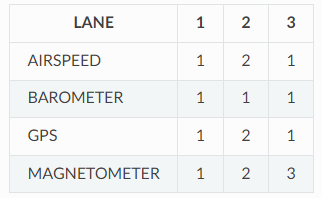
原文:Conventionally, each lane uses the primary instance of the Airspeed, Barometer, GPS and Magnetometer sensors.
疑问:3个IMU(Lane)2个GPS,怎么确定哪个Lane使用的是哪个GPS呢??Lane3使用的为什么是GPS1而不是2呢??
去源代码中一探究竟,看看这些传感器是如何被分配给 EKF lanes 的!!
待续…
4. 代码解析
待续…