近日,阿里云人工智能平台 PAI与华东师范大学陈岑副教授团队合作在深度学习顶级会议 CIKM 2023 上发表 OLSS (Optimal Linear Subspace Search) 算法,这是一种针对扩散模型的采样加速算法。在这篇论文中,扩散模型加速算法的本质被建模成线性子空间的扩张过程,给出了目前方法的统一分析,并基于此设计了新的加速算法,大幅度提升了扩散模型的生成速度。
论文:
Zhongjie Duan, Chengyu Wang, Cen Chen, Jun Huang, Weining Qian. Optimal Linear Subspace Search: Learning to Construct Fast and High-Quality Schedulers for Diffusion Models. CIKM 2023
背景
近年来,在图像生成领域,对于扩散模型的成功我们有目共睹。与基于 GAN 的生成模型不同,扩散模型需要多次调用模型进行前向推理,经过多次迭代,才能得到清晰完整的图像。扩散模型在大幅度提升生成效果的同时,也因其迭代式的生成过程面临严重的计算效率问题。我们希望改进扩散模型的生成过程,减少迭代步数,提升生成速度。
加速算法的统一分析
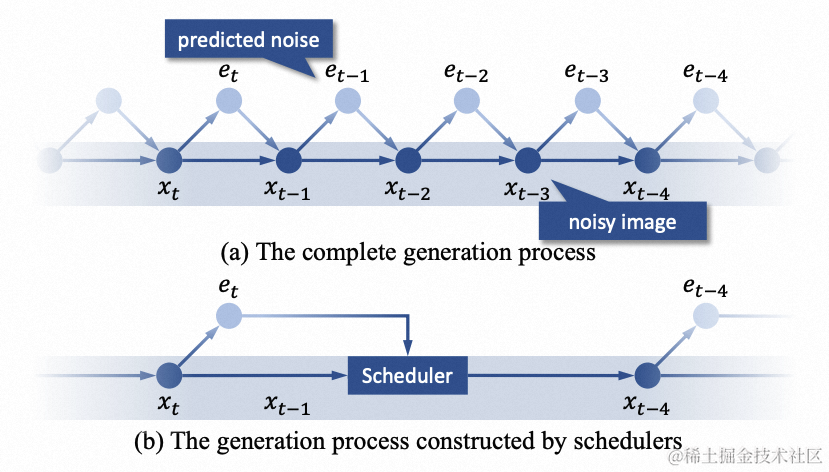
形式化地,给定一个扩散模型 ϵ θ \epsilon_\theta ϵθ,在一次完整的生成过程中从高斯噪声 x T \boldsymbol x_T xT开始,经过 T T T 步采样,依次得到 x T − 1 , … , x 0 \boldsymbol x_{T-1},\dots,\boldsymbol x_0 xT−1,…,x0。为了保证生成效果, T T T 在训练时通常被设置的非常大,例如 Stable Diffusion 中是 1000 1000 1000。现有的一些研究工作提出了“调度机”(scheduler)的概念。一个调度机会在 { T , T − 1 , … , 0 } \{T,T-1,\dots,0\} {T,T−1,…,0} 中取出一个 n n n 步递减的子序列 t ( 1 ) , … , t ( n ) t(1),\dots,t(n) t(1),…,t(n),只在这 n n n步中调用模型进行前向推理,构建完整生成过程的近似过程,重构出迭代公式。
具体地,在 DDIM 调度机中
x t ( i + 1 ) = α t ( i + 1 ) ( x t ( i ) − 1 − α t ( i ) e t ( i ) α t ( i ) ) + 1 − α t ( i + 1 ) e t ( i ) . \boldsymbol x_{t(i+1)}=\sqrt{\alpha_{t(i+1)}}\left(\frac{\boldsymbol x_{t(i)}-\sqrt{1-\alpha_{t(i)}}\boldsymbol e_{t(i)}}{\sqrt{\alpha_{t(i)}}}\right) +\sqrt{1-\alpha_{t(i+1)}}\boldsymbol e_{t(i)}. xt(i+1)=αt(i+1)(αt(i)xt(i)−1−αt(i)et(i))+1−αt(i+1)et(i).
其中 e t ( i ) \boldsymbol e_{t(i)} et(i) 是模型的输出值。在一些基于常微分方程的调度机中, x t x_t xt 被建模成步骤$ t$ 的函数,进而可以使用常微分方程的数值近似算法——前向欧拉方法求解
x t ( i + 1 ) = x t ( i ) + ( t ( i + 1 ) − t ( i ) ) d x t ( i ) d t ( i ) , \boldsymbol x_{t(i+1)}=\boldsymbol x_{t(i)}+\Big(t(i+1)-t(i)\Big)\frac{\mathrm{d} \boldsymbol x_{t(i)}}{\mathrm{d}t(i)}, xt(i+1)=xt(i)+(t(i+1)−t(i))dt(i)dxt(i),
其中
d x t d t = − d α t d t ( x t 2 α t − e t 2 α t 1 − α t ) . \frac{\mathrm{d} \boldsymbol x_{t}}{\mathrm{d}t}=-\frac{\mathrm{d} \alpha_t}{\mathrm{d} t}\left( \frac{\boldsymbol x_t}{2\alpha_t} -\frac{\boldsymbol e_t}{2\alpha_t\sqrt{1-\alpha_t}} \right). dtdxt=−dtdαt(2αtxt−2αt1−αtet).
PNDM 调度机则是基于线性多步方法构造了一个伪数值近似算法
x t ( i + 1 ) = α t ( i + 1 ) α t ( i ) x t ( i ) − 1 α t ( i ) α t ( i ) ′ e t ( i ) ′ , \boldsymbol x_{t(i+1)}=\frac{\sqrt{\alpha_{t(i+1)}}}{\sqrt{\alpha_{t(i)}}}\boldsymbol x_{t(i)}-\frac{1}{\sqrt{\alpha_{t(i)}}}\alpha_{t(i)}'\boldsymbol e_{t(i)}', xt(i+1)=αt(i)αt(i+1)xt(i)−αt(i)1αt(i)′et(i)′,
其中
e t ( i ) ′ = 1 24 ( 55 e t ( i ) − 59 e t ( i − 1 ) + 37 e t ( i − 2 ) − 9 e t ( i − 3 ) ) , \boldsymbol e_{t(i)}'=\frac{1}{24}(55 \boldsymbol e_{t(i)}-59 \boldsymbol e_{t(i-1)}+37 \boldsymbol e_{t(i-2)}-9 \boldsymbol e_{t(i-3)}), et(i)′=241(55et(i)−59et(i−1)+37et(i−2)−9et(i−3)),
α t ( i ) ′ = α t ( i + 1 ) − α t ( i ) ( 1 − α t ( i + 1 ) ) α t ( i ) + ( 1 − α t ( i ) ) α t ( i + 1 ) . \alpha_{t(i)}'=\frac{\alpha_{t(i+1)}-\alpha_{t(i)}} {\sqrt{(1-\alpha_{t(i+1)})\alpha_{t(i)}}+\sqrt{(1-\alpha_{t(i)})\alpha_{t(i+1)}}}. αt(i)′=(1−αt(i+1))αt(i)+(1−αt(i))αt(i+1)αt(i+1)−αt(i).
观察以上调度机中的迭代公式,我们不难发现
x
t
(
i
+
1
)
∈
span
{
x
t
(
i
)
,
e
t
(
1
)
,
…
,
e
t
(
i
)
}
.
\boldsymbol x_{t(i+1)}\in\text{span}\{\boldsymbol x_{t(i)},\boldsymbol e_{t(1)},\boldsymbol \dots,\boldsymbol e_{t(i)}\}.
xt(i+1)∈span{xt(i),et(1),…,et(i)}.
用数学归纳法易证
x t ( i + 1 ) ∈ span { x t ( 1 ) , e t ( 1 ) , … , e t ( i ) } . \boldsymbol x_{t(i+1)}\in\text{span}\{\boldsymbol x_{t(1)},\boldsymbol e_{t(1)},\boldsymbol \dots,\boldsymbol e_{t(i)}\}. xt(i+1)∈span{xt(1),et(1),…,et(i)}.
这其实揭示了调度机设计的本质——在由模型输出值和初始高斯噪声张成的向量空间中求解下一步的 x T \boldsymbol x_T xT。不同的调度机仅在迭代公式的系数上存在不同,我们决定设计一个新的调度机,将迭代公式中的系数设计成可训练的,使其对应的近似计算过程更加精确。
算法架构
假定 n n n个步骤 { t ( 1 ) , … , t ( n ) } \{t(1),\dots,t(n)\} {t(1),…,t(n)} 已经被选出,在第 i i i 步,我们已经得到了 x t ( 1 ) , … , x t ( i ) \boldsymbol x_{t(1)},\dots,\boldsymbol x_{t(i)} xt(1),…,xt(i) 以及 e t ( 1 ) , … , e t ( i ) \boldsymbol e_{t(1)},\dots,\boldsymbol e_{t(i)} et(1),…,et(i),考虑计算 x t ( i + 1 ) \boldsymbol x_{t(i+1)} xt(i+1) 的近似值 x ^ t ( i + 1 ) \hat{\boldsymbol x}_{t(i+1)} x^t(i+1),根据我们上文中的分析, x ^ t ( i + 1 ) \hat{\boldsymbol x}_{t(i+1)} x^t(i+1) 应当在由 { x t ( 1 ) , e t ( 1 ) , … , e t ( i ) } \{\boldsymbol x_{t(1)},\boldsymbol e_{t(1)},\boldsymbol \dots,\boldsymbol e_{t(i)}\} {xt(1),et(1),…,et(i)} 张成的线性子空间中求解,即
x ^ t ( i + 1 ) = w i , 0 x t ( 1 ) + ∑ j = 1 i w i , j e t ( j ) . \hat{\boldsymbol x}_{t(i+1)}=w_{i,0}\boldsymbol x_{t(1)}+\sum_{j=1}^i w_{i,j}\boldsymbol e_{t(j)}. x^t(i+1)=wi,0xt(1)+j=1∑iwi,jet(j).
为了确定最佳的参数 { w i , j } \{w_{i,j}\} {wi,j},我们需要对其进行训练。考虑到训练参数较少,我们并不采用基于梯度的训练方法,而是直接使用最小二乘法求最优解。首先采集来自完整生成过程的变量 x t ( i + 1 ) \boldsymbol x_{t(i+1)} xt(i+1),令损失函数 L = ∣ ∣ x ^ t ( i + 1 ) − x t ( i + 1 ) ∣ ∣ 2 2 \mathcal L=||\hat{\boldsymbol x}_{t(i+1)}-\boldsymbol x_{t(i+1)}||_2^2 L=∣∣x^t(i+1)−xt(i+1)∣∣22,使用基于 QR 分解的最小二乘求解算法,在保证数值稳定性的前提下计算出最优参数,构成新的调度机算法。我们称这个新的调度机算法为 OLSS (Optimal Linear Subspace Search)。
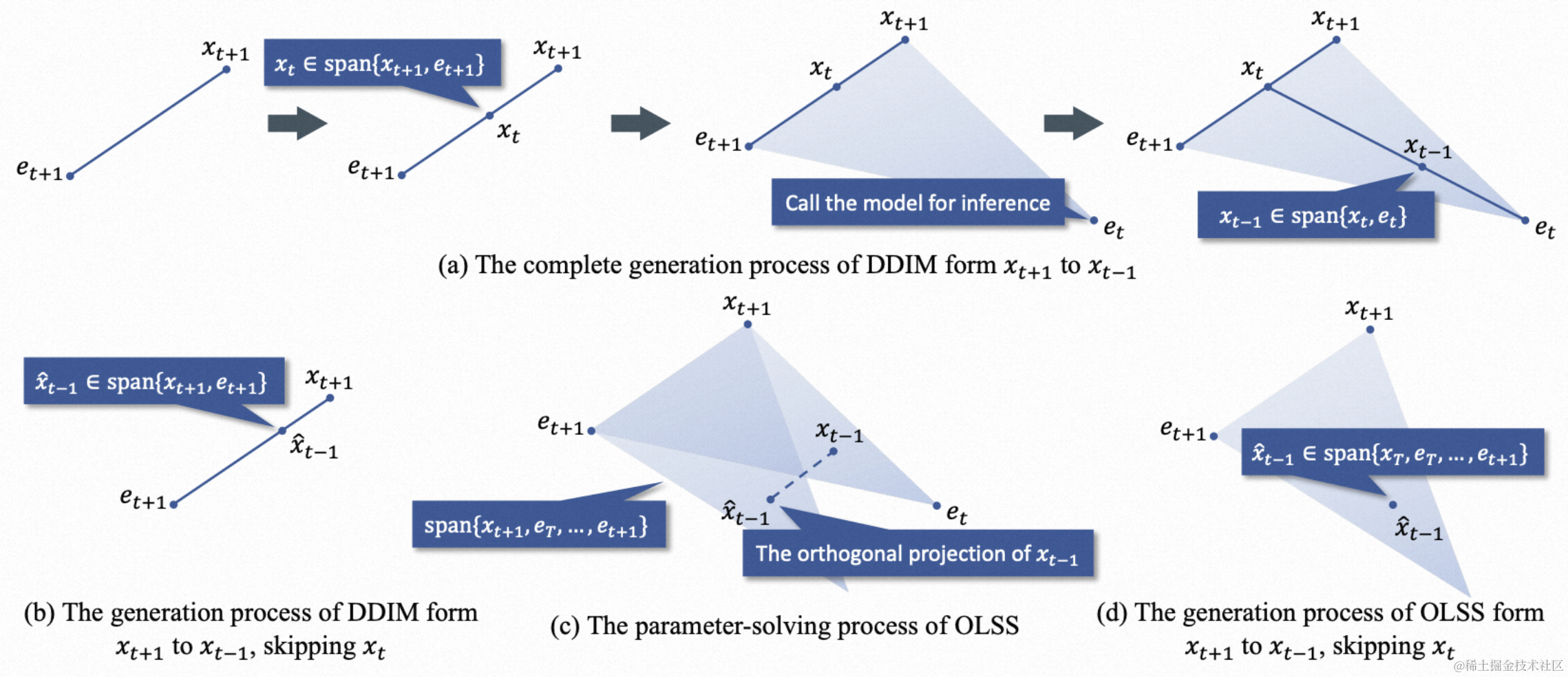
我们在下图中提供了这个过程的几何解释,在完整生成过程中 x t − 1 ∈ span { x t , e t } \boldsymbol x_{t-1}\in\text{span}\{\boldsymbol x_t, \boldsymbol e_t\} xt−1∈span{xt,et};由 DDIM 调度机构造的近似过程中,若跳过 x t \boldsymbol x_t xt,那么 x ^ ∗ t − 1 ∈ span x ∗ t + 1 , e _ t + 1 ; \hat{\boldsymbol x}*{t-1}\in\text{span}{\boldsymbol x*{t+1}, \boldsymbol e\_{t+1}}; x^∗t−1∈spanx∗t+1,e_t+1;而在由 OLSS 构造的近似过程中,若跳过 x t \boldsymbol x_t xt,则在一个更高维线性子空间 span { x T , e T , … , e t + 1 } \text{span}\{\boldsymbol x_T,\boldsymbol e_T,\dots,\boldsymbol e_{t+1}\} span{xT,eT,…,et+1}中计算 x ^ t − 1 \hat{\boldsymbol x}_{t-1} x^t−1,具有更低的误差
此外,为了进一步降低这个算法的误差,我们还对 { t ( 1 ) , … , t ( n ) } \{t(1),\dots,t(n)\} {t(1),…,t(n)} 进行了调整。具体地,设计了一个启发式的路径规划算法,分为以下三部分:
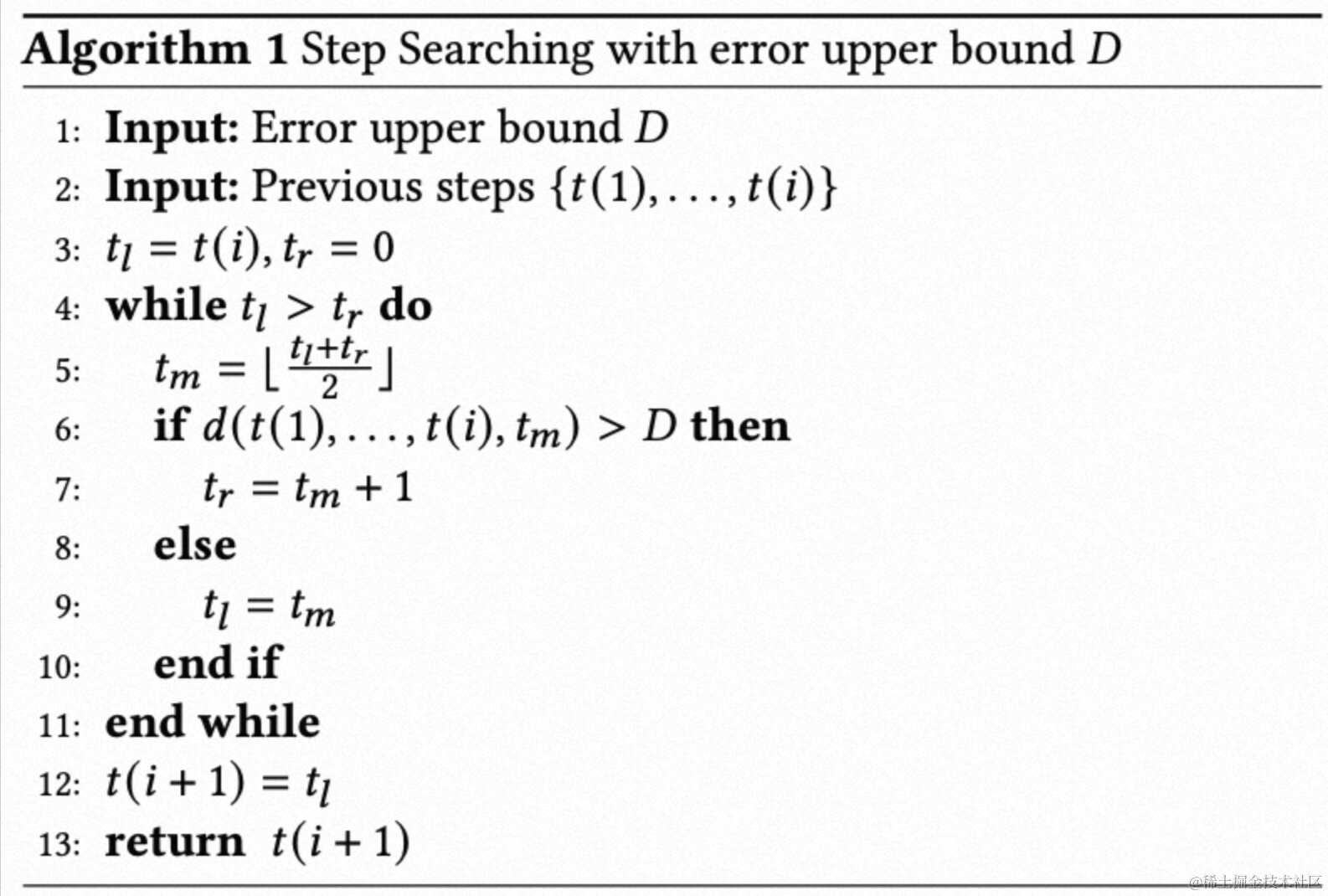
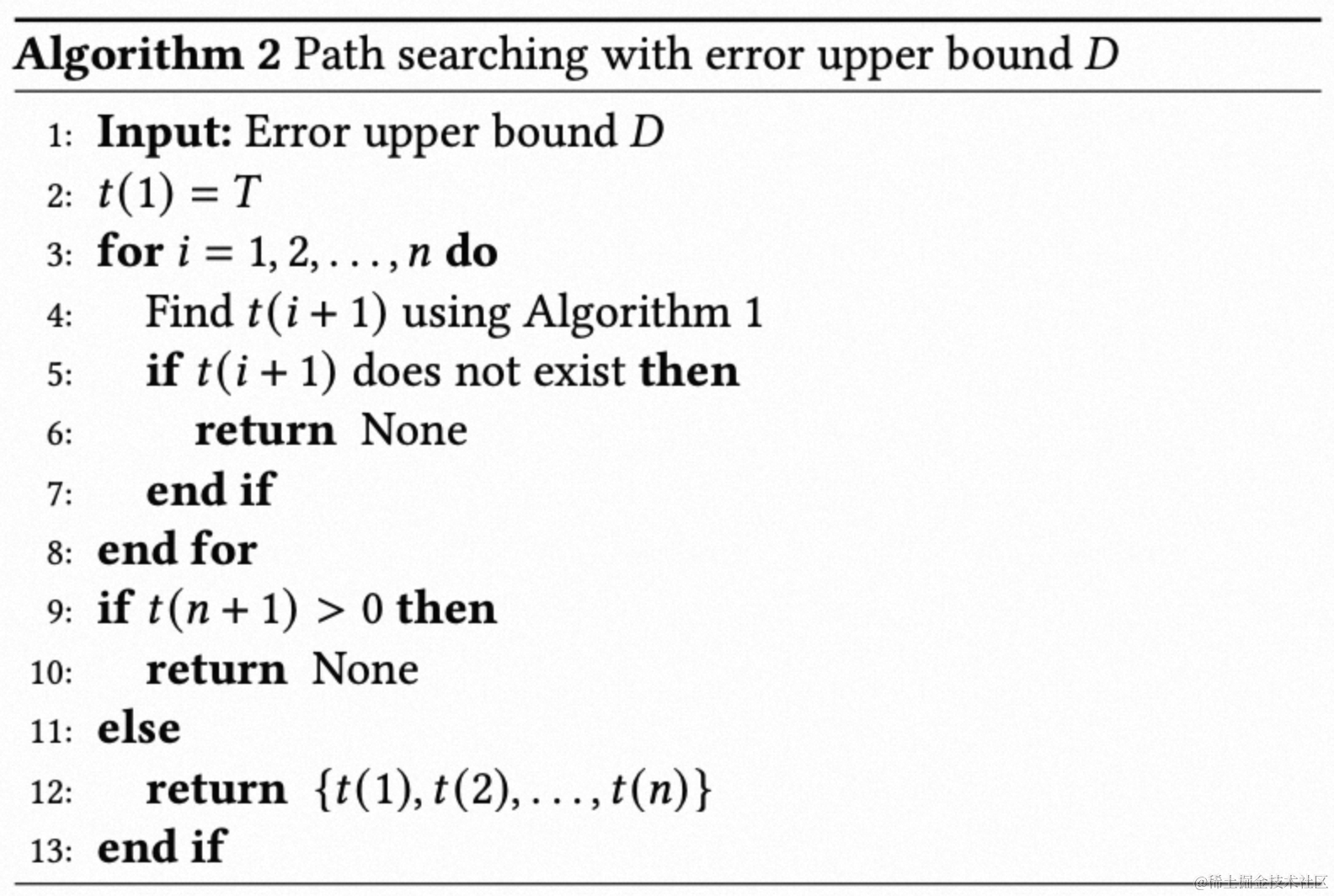
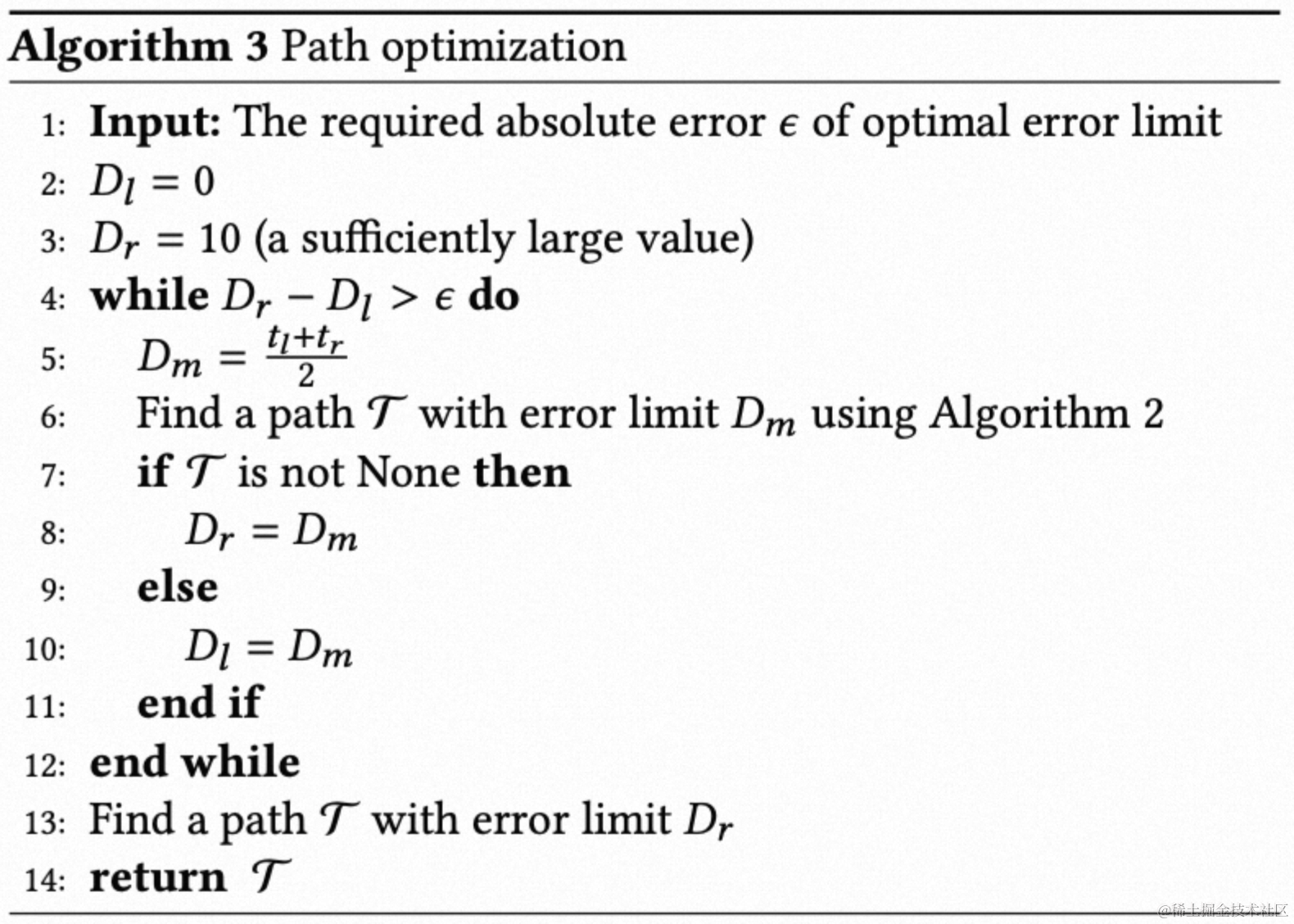
其中算法 1 利用贪心策略搜索下一步的 t ( i ) t(i) t(i),算法 2 调用算法 1 搜索在误差上届 D D D 下是否存在这样的路径,算法 3 调用算法 2 搜索最低的误差上界。整个路径规划算法可以使 n n n 步中的最大误差最小。
实验结果
我们在主流的 Stable Diffusion 1.4 和 Stable Diffusion 2.1 上进行了实验,测试了包括 OLSS 和 OLSS-P(无路径规划版本)在内的 8 个调度机算法,使用 5 步、10 步、20 步的算法与 100 步、1000 步的算法比较,FID 结果(越小越好)如下表所示:
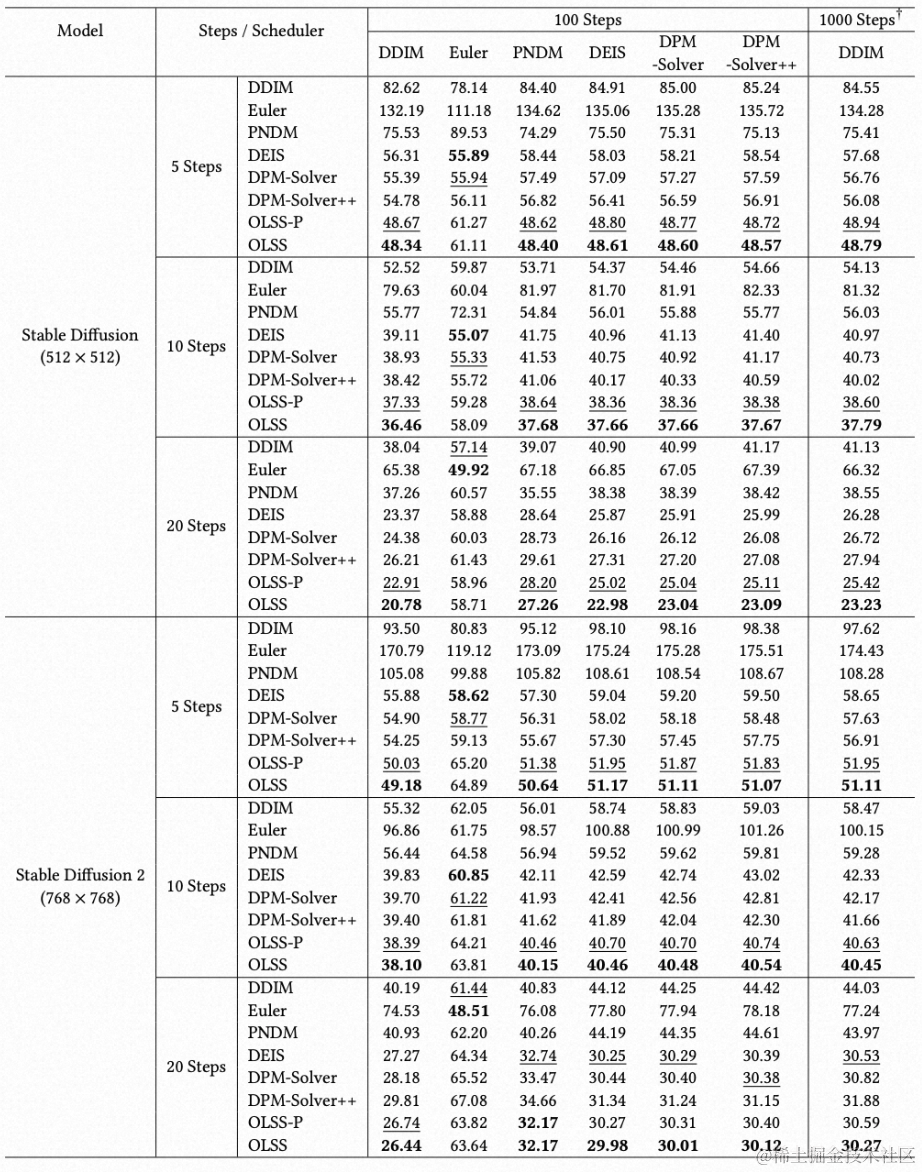
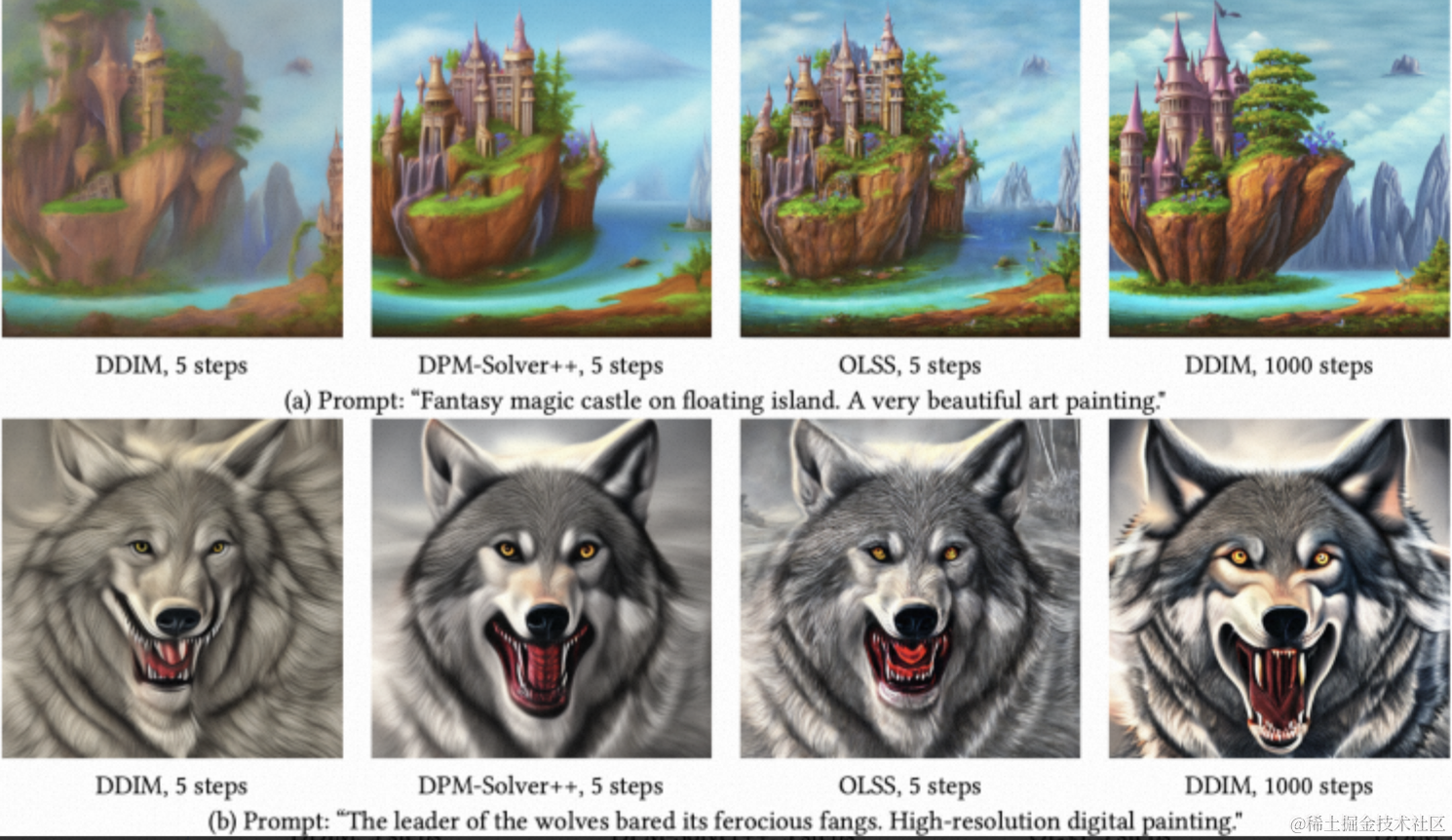
我们可以明显看出,在同等步数下,OLSS 比其他调度机算法能够实现更高的图像质量,这证明了 OLSS 方法的巨大优越性。此外,从以下例子中我们也可以明显看出 OLSS 在极少步数下的效果:
目前 OLSS 已经在 EasyNLP(https://github.com/alibaba/EasyNLP/tree/master/diffusion/olss_scheduler)开源。欢迎广大用户试用!
参考文献
- Bingyan Liu, Weifeng Lin, Zhongjie Duan, Chengyu Wang, Ziheng Wu, Zipeng Zhang, Kui Jia, Lianwen Jin, Cen Chen, Jun Huang. Rapid Diffusion: Building Domain-Specific Text-to-Image Synthesizers with Fast Inference Speed. In the 61st Annual Meeting of the Association for Computational Linguistics (Industry Track).
- Chengyu Wang, Minghui Qiu, Taolin Zhang, Tingting Liu, Lei Li, Jianing Wang, Ming Wang, Jun Huang, Wei Lin. EasyNLP: A Comprehensive and Easy-to-use Toolkit for Natural Language Processing. In the 2022 Conference on Empirical Methods in Natural Language Processing (Demo Track).
- Jiaming Song, Chenlin Meng, and Stefano Ermon. 2020. Denoising Diffusion Implicit Models. In International Conference on Learning Representations.
- Tero Karras, Miika Aittala, Timo Aila, and Samuli Laine. 2022. Elucidating the design space of diffusion-based generative models. Advances in Neural Information Processing Systems 35 (2022), 26565–26577.
- Luping Liu, Yi Ren, Zhijie Lin, and Zhou Zhao. 2021. Pseudo Numerical Methods for Diffusion Models on Manifolds. In International Conference on Learning Representations.
- Qinsheng Zhang and Yongxin Chen. 2022. Fast Sampling of Diffusion Models with Exponential Integrator. In The Eleventh International Conference on Learning Representations.
- Cheng Lu, Yuhao Zhou, Fan Bao, Jianfei Chen, Chongxuan Li, and Jun Zhu. 2022. Dpm-solver: A fast ode solver for diffusion probabilistic model sampling in around 10 steps. Advances in Neural Information Processing Systems 35 (2022), 5775–5787.
- Cheng Lu, Yuhao Zhou, Fan Bao, Jianfei Chen, Chongxuan Li, and Jun Zhu. 2022. Dpm-solver++: Fast solver for guided sampling of diffusion probabilistic models. arXiv preprint arXiv:2211.01095 (2022).
论文信息
论文标题:Optimal Linear Subspace Search: Learning to Construct Fast and High-Quality Schedulers for Diffusion Models
论文作者:段忠杰、汪诚愚、陈岑、黄俊、钱卫宁
论文pdf链接:https://arxiv.org/abs/2305.14677