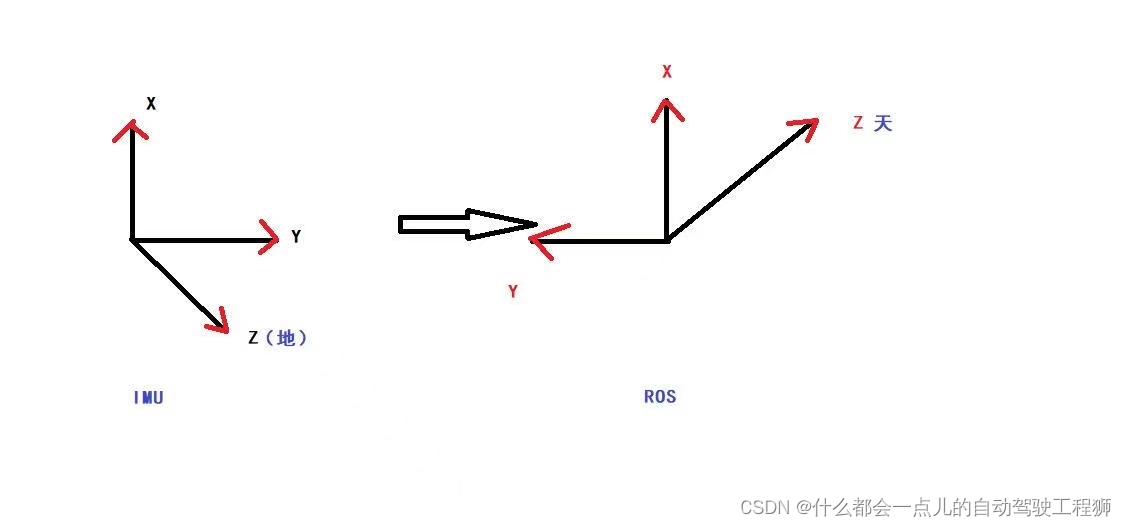
示例使用的Imu为轮趣科技 n100 mini其中imu出来的数据的坐标系是基于ROS坐标系的
Eigen::Quaterniond q_ahrs(ahrs_frame_.frame.data.data_pack.Qw,
ahrs_frame_.frame.data.data_pack.Qx,
ahrs_frame_.frame.data.data_pack.Qy,
ahrs_frame_.frame.data.data_pack.Qz);
Eigen::Quaterniond q_r =
Eigen::AngleAxisd( PI, Eigen::Vector3d::UnitZ()) *
Eigen::AngleAxisd( PI, Eigen::Vector3d::UnitY()) *
Eigen::AngleAxisd( 0.00000, Eigen::Vector3d::UnitX());
Eigen::Quaterniond q_rr =
Eigen::AngleAxisd( 0.00000, Eigen::Vector3d::UnitZ()) *
Eigen::AngleAxisd( 0.00000, Eigen::Vector3d::UnitY()) *
Eigen::AngleAxisd( PI, Eigen::Vector3d::UnitX());
Eigen::Quaterniond q_out = q_r * q_ahrs * q_rr
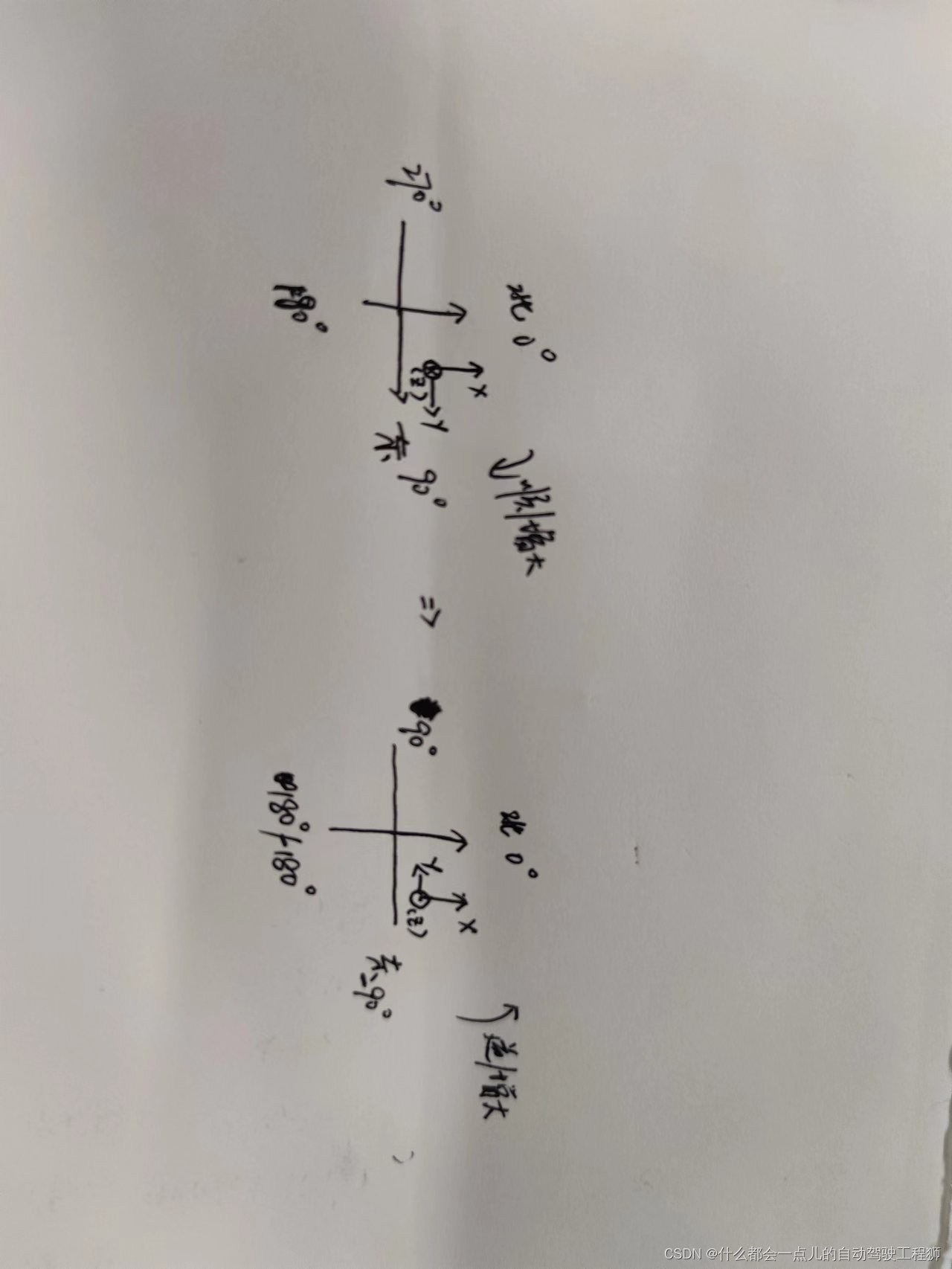
为什么要右乘q_rr?
回答:你可以把*q_rr去掉,重新编译后,通过TF转换看到,实际上这个坐标是倒着的,还需要绕X轴转180°才是我们ROS里面用到的坐标系。
只左乘q_r的话是可以完成TF的坐标变换的,但是我们通常在ros里用到的坐标系是前左上,所以还要通过右乘q_rr来修正坐标系的位姿
备注:这款IMU是九轴IMU,融合了磁力计,也就是原始的yaw角指北是0度,范围为0-360°,顺时针增大。转换到imu单品ROS标准下的坐标后 航向应该特殊处理为东北天坐标系。
输入的单帧Imu示例
seq: 90498
stamp:
secs: 1698127594
nsecs: 155961838
frame_id: "gyro_link"
orientation:
x: 0.0049992394633591695
y: 0.002799155190586991
z: -0.1353550255298614
w: -0.9907805919647217
orientation_covariance: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
angular_velocity:
x: -0.0013670891057699919
y: 0.0030183307826519012
z: -0.002960443962365389
angular_velocity_covariance: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
linear_acceleration:
x: 0.04501450061798096
y: -0.09672745317220688
z: 9.795211791992188
linear_acceleration_covariance: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
imu_integration.h
#ifndef SLAM_IN_AUTO_DRIVING_IMU_INTEGRATION_H
#define SLAM_IN_AUTO_DRIVING_IMU_INTEGRATION_H
#include "eigen_types.h"
#include "imu.h"
#include "nav_state.h"
namespace sad {
/**
* 本程序演示单纯靠IMU的积分
*/
class IMUIntegration {
public:
IMUIntegration(const Vec3d& gravity, const Vec3d& init_bg, const Vec3d& init_ba)
: gravity_(gravity), bg_(init_bg), ba_(init_ba) {}
// 增加imu读数
void AddIMU(const IMU& imu) {
double dt = imu.timestamp_ - timestamp_;
if (dt > 0 && dt < 0.1)
{
// 假设IMU时间间隔在0至0.1以内
p_ = p_ + v_ * dt + 0.5 * gravity_ * dt * dt + 0.5 * (R_ * (imu.acce_ - ba_)) * dt * dt;
v_ = v_ + R_ * (imu.acce_ - ba_) * dt + gravity_ * dt;
R_ = R_ * Sophus::SO3d::exp((imu.gyro_ - bg_) * dt);
}
// 更新时间
timestamp_ = imu.timestamp_;
}
/// 组成NavState
NavStated GetNavState() const { return NavStated(timestamp_, R_, p_, v_, bg_, ba_); }
SO3 GetR() const { return R_; }
Vec3d GetV() const { return v_; }
Vec3d GetP() const { return p_; }
private:
// 累计量
SO3 R_;
Vec3d v_ = Vec3d::Zero();
Vec3d p_ = Vec3d::Zero();
double timestamp_ = 0.0;
// 零偏,由外部设定
Vec3d bg_ = Vec3d::Zero();
Vec3d ba_ = Vec3d::Zero();
Vec3d gravity_ = Vec3d(0, 0, -9.8); // 重力
};
} // namespace sad
#endif // SLAM_IN_AUTO_DRIVING_IMU_INTEGRATION_H
static_imu_init.h
#ifndef SLAM_IN_AUTO_DRIVING_STATIC_IMU_INIT_H
#define SLAM_IN_AUTO_DRIVING_STATIC_IMU_INIT_H
#include "eigen_types.h"
#include "imu.h"
#include "odom.h"
#include <deque>
namespace sad {
/**
* IMU水平静止状态下初始化器
* 使用方法:调用AddIMU, AddOdom添加数据,使用InitSuccess获取初始化是否成功
* 成功后,使用各Get函数获取内部参数
*
* 初始化器在每次调用AddIMU时尝试对系统进行初始化。在有odom的场合,初始化要求odom轮速读数接近零;没有时,假设车辆初期静止。
* 初始化器收集一段时间内的IMU读数,按照书本3.5.4节估计初始零偏和噪声参数,提供给ESKF或者其他滤波器
*/
class StaticIMUInit {
public:
struct Options
{
Options() {}
double init_time_seconds_ = 10.0; // 静止时间
int init_imu_queue_max_size_ = 2000; // 初始化IMU队列最大长度
int static_odom_pulse_ = 5; // 静止时轮速计输出噪声
double max_static_gyro_var = 0.5; // 静态下陀螺测量方差
double max_static_acce_var = 0.05; // 静态下加计测量方差
double gravity_norm_ = 9.81; // 重力大小
bool use_speed_for_static_checking_ = false; // 是否使用odom来判断车辆静止(部分数据集没有odom选项)
};
/// 构造函数
StaticIMUInit(Options options = Options()) : options_(options) {}
/// 添加IMU数据
bool AddIMU(const IMU& imu);
/// 添加轮速数据
bool AddOdom(const Odom& odom);
/// 判定初始化是否成功
bool InitSuccess() const { return init_success_; }
/// 获取各Cov, bias, gravity
Vec3d GetCovGyro() const { return cov_gyro_; }
Vec3d GetCovAcce() const { return cov_acce_; }
Vec3d GetInitBg() const { return init_bg_; }
Vec3d GetInitBa() const { return init_ba_; }
Vec3d GetGravity() const { return gravity_; }
private:
/// 尝试对系统初始化
bool TryInit();
Options options_; // 选项信息
bool init_success_ = false; // 初始化是否成功
Vec3d cov_gyro_ = Vec3d::Zero(); // 陀螺测量噪声协方差(初始化时评估)
Vec3d cov_acce_ = Vec3d::Zero(); // 加计测量噪声协方差(初始化时评估)
Vec3d init_bg_ = Vec3d::Zero(); // 陀螺初始零偏
Vec3d init_ba_ = Vec3d::Zero(); // 加计初始零偏
Vec3d gravity_ = Vec3d::Zero(); // 重力
bool is_static_ = false; // 标志车辆是否静止
std::deque<IMU> init_imu_deque_; // 初始化用的数据
double current_time_ = 0.0; // 当前时间
double init_start_time_ = 0.0; // 静止的初始时间
};
} // namespace sad
#endif // SLAM_IN_AUTO_DRIVING_STATIC_IMU_INIT_H
static_imu_init.cc
#include "math_utils.h"
namespace sad {
bool StaticIMUInit::AddIMU(const IMU& imu)
{
if (init_success_)
{
return true;
}
if (options_.use_speed_for_static_checking_ && !is_static_)
{
LOG(WARNING) << "等待车辆静止";
init_imu_deque_.clear();
return false;
}
if (init_imu_deque_.empty())
{
// 记录初始静止时间
init_start_time_ = imu.timestamp_;
}
// 记入初始化队列
init_imu_deque_.push_back(imu);
double init_time = imu.timestamp_ - init_start_time_; // 初始化经过时间
if (init_time > options_.init_time_seconds_)
{
// 尝试初始化逻辑
TryInit();
}
// 维持初始化队列长度
while (init_imu_deque_.size() > options_.init_imu_queue_max_size_)
{
init_imu_deque_.pop_front();
}
current_time_ = imu.timestamp_;
return false;
}
bool StaticIMUInit::AddOdom(const Odom& odom) {
// 判断车辆是否静止
if (init_success_) {
return true;
}
if (odom.left_pulse_ < options_.static_odom_pulse_ && odom.right_pulse_ < options_.static_odom_pulse_) {
is_static_ = true;
} else {
is_static_ = false;
}
current_time_ = odom.timestamp_;
return true;
}
bool StaticIMUInit::TryInit()
{
if (init_imu_deque_.size() < 10) {
return false;
}
// 计算均值和方差
Vec3d mean_gyro, mean_acce;
math::ComputeMeanAndCovDiag(init_imu_deque_, mean_gyro, cov_gyro_, [](const IMU& imu) { return imu.gyro_; });
math::ComputeMeanAndCovDiag(init_imu_deque_, mean_acce, cov_acce_, [this](const IMU& imu) { return imu.acce_; });
// 以acce均值为方向,取9.8长度为重力
LOG(INFO) << "mean acce: " << mean_acce.transpose();
gravity_ = -mean_acce / mean_acce.norm() * options_.gravity_norm_;
// 重新计算加计的协方差
math::ComputeMeanAndCovDiag(init_imu_deque_, mean_acce, cov_acce_,
[this](const IMU& imu) { return imu.acce_ + gravity_; });
// 检查IMU噪声
if (cov_gyro_.norm() > options_.max_static_gyro_var) {
LOG(ERROR) << "陀螺仪测量噪声太大" << cov_gyro_.norm() << " > " << options_.max_static_gyro_var;
return false;
}
if (cov_acce_.norm() > options_.max_static_acce_var) {
LOG(ERROR) << "加计测量噪声太大" << cov_acce_.norm() << " > " << options_.max_static_acce_var;
return false;
}
// 估计测量噪声和零偏
init_bg_ = mean_gyro;
init_ba_ = mean_acce;
LOG(INFO) << "IMU 初始化成功,初始化时间= " << current_time_ - init_start_time_ << ", bg = " << init_bg_.transpose()
<< ", ba = " << init_ba_.transpose() << ", gyro sq = " << cov_gyro_.transpose()
<< ", acce sq = " << cov_acce_.transpose() << ", grav = " << gravity_.transpose()
<< ", norm: " << gravity_.norm();
LOG(INFO) << "mean gyro: " << mean_gyro.transpose() << " acce: " << mean_acce.transpose();
init_success_ = true;
return true;
}
} // namespace sad
main.cpp
#include<ros/ros.h>
#include<imu_integration.h>
#include "sensor_msgs/Imu.h"
#include "tf/tf.h"
#include<nav_msgs/Odometry.h>
#include<static_imu_init.h>
// 该实验中,我们假设零偏已知
Vec3d gravity(-0.050622,0.102474,-9.809334); // 重力方向
Vec3d init_bg(-0.005136,-0.000981,-0.003482);
Vec3d init_ba(-0.000118,0.000239,-0.022851);
sad::IMUIntegration imu_integ1(gravity, init_bg, init_ba);
ros::Publisher pub_;
sad::StaticIMUInit imu_init; // 使用默认配置
sad::IMU imu_format(const sensor_msgs::Imu &imu_msg)
{
sad::IMU imu;
imu.timestamp_=imu_msg.header.stamp.toSec();
imu.acce_.x()=imu_msg.linear_acceleration.x;
imu.acce_.y()=imu_msg.linear_acceleration.y;
imu.acce_.z()=imu_msg.linear_acceleration.z;
imu.gyro_.x()=imu_msg.angular_velocity.x;
imu.gyro_.y()=imu_msg.angular_velocity.y;
imu.gyro_.z()=imu_msg.angular_velocity.z;
return imu;
}
void IMUCallback(const sensor_msgs::Imu &imu_msg)
{
sad::IMU imu_out=imu_format(imu_msg);
/// IMU 处理函数
if (!imu_init.InitSuccess())
{
imu_init.AddIMU(imu_out);
return;
}
//imu_init.GetInitBg(), imu_init.GetInitBa(), imu_init.GetGravity()
static bool imu_inited = false;
if(!imu_inited)
{
ROS_INFO("bg:%f,%f,%f",imu_init.GetInitBg().x(),imu_init.GetInitBg().y(),imu_init.GetInitBg().z());
ROS_INFO("ba:%f,%f,%f",imu_init.GetInitBa().x(),imu_init.GetInitBa().y(),imu_init.GetInitBa().z());
ROS_INFO("g:%f,%f,%f",imu_init.GetGravity().x(),imu_init.GetGravity().y(),imu_init.GetGravity().z());
imu_inited=true;
}
imu_integ1.AddIMU(imu_out);
Eigen::Matrix3d R=imu_integ1.GetR().matrix();
nav_msgs::Odometry odom;
odom.header.frame_id="odom";
odom.header.stamp=imu_msg.header.stamp;
odom.child_frame_id="base_link";
odom.pose.pose.position.x=imu_integ1.GetP().x();
odom.pose.pose.position.y=imu_integ1.GetP().y();
odom.pose.pose.position.z=imu_integ1.GetP().z();
Eigen::Quaterniond q;
q=R.block<3,3>(0,0);
odom.pose.pose.orientation.x=q.x();
odom.pose.pose.orientation.y=q.y();
odom.pose.pose.orientation.z=q.z();
odom.pose.pose.orientation.w=q.w();
odom.twist.twist.linear.x=imu_integ1.GetV().x();
odom.twist.twist.linear.y=imu_integ1.GetV().y();
odom.twist.twist.linear.z=imu_integ1.GetV().z();
pub_.publish(odom);
}
int main(int argc, char** argv)
{
ros::init(argc, argv, "imu_integration");
ros::NodeHandle n;
ros::Subscriber sub = n.subscribe("/imu", 100, IMUCallback);
pub_=n.advertise<nav_msgs::Odometry>("/imu_integration_odom",10);
ros::spin();
return 0;
}